Thingiverse

Parametrisches Pfeilrad-Planetengetriebe / Parametric Herringbone Planetary Gear by janssen86
by Thingiverse
Last crawled date: 3 years ago
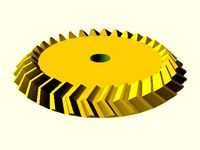
Parametrisches Planetengetriebe mit Evolventen-Pfeilverzahnung
Dieses Skript berechnet sowohl das Hohlrad als auch die Anzahl und Geometrie der Planetenräder aus den Zahnzahlen für Sonne und Planeten. Bei Modul m und Zahnzahlen von Sonne zs und Planeten zp beträgt der Abstand der Achsenm⁄2·(zs + zp)
Wenn m das Modul ist, zs Zahnzahl der Sonne, zp Zahnzahl der Planeten und br die Randbreite, dann beträgt der Außendurchmesser m·(zs+2zp+2.333)+2br
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Wenn keine Anzahl von Planetenrädern angegeben wird (anzahl_planeten = 0), versucht das Modul, diese zu berechnen.
Um beim 3D-Druck ein Verkleben der besonders der Planetenräder mit dem Hohlrad zu vermeiden, kann das Getriebe auseinander gebaut gedruckt werden (zusammen gebaut = 0). Dabei ist zu beachten, dass eine Pfeilverzahnung den Zusammenbau erschwert. Erfahrungsgemäß ist dies bei 30° noch möglich; sollte es hier jedoch zu Problemen kommen, dann ist ein geringerer Schrägungswinkel zu wählen. Natürlich kann man auch Geradverzahnung wählen (Schraegungswinkel = 0°).
Außerdem kann ein Verkleben durch ein ausreichend großes Spiel vermieden werden; ein ausreichendes Spiel vermeidet auch Probleme beim Kämmen. Das Spiel kann um so kleiner bleiben, je besser die Auflösung des 3D-Druckers ist, sollte erfahrungsgemäß 5% jedoch nicht unterschreiten.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
spiel = Spiel zwischen Zahnflanken als Bruch der Gesamtbreite (0 = kein Spiel)
modul = Höhe des Zahnkopfes über dem Teilkegel
zahnzahl_sonne = Anzahl der Zähne des Sonnenrads
zahnzahl_planet = Anzahl der Zähne eines Planetenrads
anzahl_planeten = Anzahl der Planetenräder
breite = Zahnbreite
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel (Geradverzahnung)
zusammen_gebaut = Komponenten zusammengebaut (= 1) für Konstruktion oder auseinander (= 0) zum 3D-Druck
optimiert = Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt (= 1, wenn wahr)
+++
Parametric Planetary Gear using Involute Tooth Geometry and Herringbone Shape
This script calculates both the ring gear as well as the number and geometry of the planetary gears from the number of teeth on the sun and planets. For a module of m, zs teeth for the sun and zp teeth for the planets, the centre distance will bem⁄2·(zs + zp)
If the number of planets is set to zero (anzahl_planeten = 0) then the module will try and calculate them.
For a module of m, zs teeth for the sun, zp teeth for the planets and a rim width of br, the outer diameter is m·(zs+2zp+2.333)+2br
The helix angle should be between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle 20° becomes a pressure angle of 22.80° in the transverse section.
To avoid the gears sticking in a 3D print, particularly sticking of the planet gears to the ring gear, the gears can be printed in disassembled layout (zusammen gebaut = 0). In that case, please note that herringbone teeth complicate the re-assembly. Experience shows that reassembly is still possible at 30°; however in case of reassembly problems, a lesser helix angle should be selected. Of course, one could always choose straight teeth (Schraegungswinkel = 0).
The gears can also be kept from sticking by a sufficiently large clearance ("Spiel"); a sufficient clearance also avoids meshing problems. Clearance can be left smaller if the 3D printer offers good resolution, however experience shows that it should not be less than 5%.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=1)
Parameters:
spiel = clearance between teeth as a fraction of their width (0 = no clearance)
modul = gear module = 25.4 / diametrical pitch = circular pitch / pi
zahnzahl_sonne = number of teeth on the sun gear
zahnzahl_planet = number of teeth per planet gear
anzahl_planeten = number of planet gears
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
zusammen_gebaut = components assembled (= 1) for construction or disassembled (= 0) for 3D printing
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
Dieses Skript berechnet sowohl das Hohlrad als auch die Anzahl und Geometrie der Planetenräder aus den Zahnzahlen für Sonne und Planeten. Bei Modul m und Zahnzahlen von Sonne zs und Planeten zp beträgt der Abstand der Achsenm⁄2·(zs + zp)
Wenn m das Modul ist, zs Zahnzahl der Sonne, zp Zahnzahl der Planeten und br die Randbreite, dann beträgt der Außendurchmesser m·(zs+2zp+2.333)+2br
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Wenn keine Anzahl von Planetenrädern angegeben wird (anzahl_planeten = 0), versucht das Modul, diese zu berechnen.
Um beim 3D-Druck ein Verkleben der besonders der Planetenräder mit dem Hohlrad zu vermeiden, kann das Getriebe auseinander gebaut gedruckt werden (zusammen gebaut = 0). Dabei ist zu beachten, dass eine Pfeilverzahnung den Zusammenbau erschwert. Erfahrungsgemäß ist dies bei 30° noch möglich; sollte es hier jedoch zu Problemen kommen, dann ist ein geringerer Schrägungswinkel zu wählen. Natürlich kann man auch Geradverzahnung wählen (Schraegungswinkel = 0°).
Außerdem kann ein Verkleben durch ein ausreichend großes Spiel vermieden werden; ein ausreichendes Spiel vermeidet auch Probleme beim Kämmen. Das Spiel kann um so kleiner bleiben, je besser die Auflösung des 3D-Druckers ist, sollte erfahrungsgemäß 5% jedoch nicht unterschreiten.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
spiel = Spiel zwischen Zahnflanken als Bruch der Gesamtbreite (0 = kein Spiel)
modul = Höhe des Zahnkopfes über dem Teilkegel
zahnzahl_sonne = Anzahl der Zähne des Sonnenrads
zahnzahl_planet = Anzahl der Zähne eines Planetenrads
anzahl_planeten = Anzahl der Planetenräder
breite = Zahnbreite
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel (Geradverzahnung)
zusammen_gebaut = Komponenten zusammengebaut (= 1) für Konstruktion oder auseinander (= 0) zum 3D-Druck
optimiert = Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt (= 1, wenn wahr)
+++
Parametric Planetary Gear using Involute Tooth Geometry and Herringbone Shape
This script calculates both the ring gear as well as the number and geometry of the planetary gears from the number of teeth on the sun and planets. For a module of m, zs teeth for the sun and zp teeth for the planets, the centre distance will bem⁄2·(zs + zp)
If the number of planets is set to zero (anzahl_planeten = 0) then the module will try and calculate them.
For a module of m, zs teeth for the sun, zp teeth for the planets and a rim width of br, the outer diameter is m·(zs+2zp+2.333)+2br
The helix angle should be between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle 20° becomes a pressure angle of 22.80° in the transverse section.
To avoid the gears sticking in a 3D print, particularly sticking of the planet gears to the ring gear, the gears can be printed in disassembled layout (zusammen gebaut = 0). In that case, please note that herringbone teeth complicate the re-assembly. Experience shows that reassembly is still possible at 30°; however in case of reassembly problems, a lesser helix angle should be selected. Of course, one could always choose straight teeth (Schraegungswinkel = 0).
The gears can also be kept from sticking by a sufficiently large clearance ("Spiel"); a sufficient clearance also avoids meshing problems. Clearance can be left smaller if the 3D printer offers good resolution, however experience shows that it should not be less than 5%.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=1)
Parameters:
spiel = clearance between teeth as a fraction of their width (0 = no clearance)
modul = gear module = 25.4 / diametrical pitch = circular pitch / pi
zahnzahl_sonne = number of teeth on the sun gear
zahnzahl_planet = number of teeth per planet gear
anzahl_planeten = number of planet gears
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
zusammen_gebaut = components assembled (= 1) for construction or disassembled (= 0) for 3D printing
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
Similar models
thingiverse
free

Getriebe Bibliothek für OpenSCAD / Gears Library for OpenSCAD by janssen86
...ght reduction resp. surface increase, if geometry allows
zusammen_gebaut = assembled (true) or disassembled for printing (false)
thingiverse
free

Parametrisches Stirnrad / Parametric Spur gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

Parametrisches Hohlrad / Parametric Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free

Parametrische Zahnstange mit Ritzel / Parametric Gear Rack and Pinion by janssen86
...ix angle to the rotation axis on the pinion; 0° = straight teeth
zusammen_gebaut = assembled (1) or disassembled for printing (0)
thingiverse
free

Parametrisches Pfeil-Hohlrad / Parametric Herringbone Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free

Parametrische Zahnstange / Parametric Gear Rack by janssen86
...dard value = 20° according to din 867
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
thingiverse
free

Parametrisches Kegelrad-Paar / Parametric Pair of Bevel Gears by janssen86
...eeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (1) oder disassembled for printing (0)
thingiverse
free
Parametrisches Pfeil-Kegelrad / Parametric Herringbone Bevel Gear by janssen86
... according to din 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free

Parametrisches Kegelrad / Parametric Bevel Gear by janssen86
... = 20° according to din 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
Pfeilrad
thingiverse
free
Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

RC gears for N20 motor by ka3ros
...thingiverse those gears have been generated with the "parametrisches pfeilrad / parametric herringbone spur gear" openscad library from janssen86....
thingiverse
free
Getriebe Bibliothek für OpenSCAD / Gears Library for OpenSCAD by janssen86
...resp. surface increase, if geometry allows +++ +++ parametrisches pfeilrad mit evolventenverzahnung erzeugt ein stirnrad mit pfeilverzahnung ohne profilverschiebung....
Planetengetriebe
thingiverse
free

Planetengetriebe für nema 17 Verhältniss 1:5 by Mastieb
...und motor in einem stück in den
original micro swiss alu extruder passt, später wird das ganze komplett ohne aluträger
adaptiert.
thingiverse
free

Front Motor Mount for SCX10 Planetary Grearbox with Servo in Rails
...to the gearbox that is used just for reference.https://www.scm-modellbau.com/lesu-unterflurgetriebe-planeten-getriebe-untersetzung-1-5-metall orhttps://www.ebay.de/itm/1-10-rc-crawler-3-1-planetengetriebeuntersetzung-einheit-fur-540-motor-r-f7i3/183998268721?_trkparms=aid%3d1110001%26algo%3dsplice.sim%26ao%3d2%26asc%3d20160323102634%26meid%3d48716946dc8444df8bf0ff494a6e6466%26pid%3d100623%26rk%3d4%26rkt%3d6%26mehot%3dlo%26sd%3d184017878295%26itm%3d183998268721%26pmt%3d1%26noa%3d1%26pg%3d2047675&_trksid=p2047675.c100623.m-1 ...
thingiverse
free
Getriebe Bibliothek für OpenSCAD / Gears Library for OpenSCAD by janssen86
...3d-druckers ist, sollte erfahrungsgemäß 5% jedoch nicht unterschreiten. format: planetengetriebemodul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)...
grabcad
free

Planetengetriebe
...planetengetriebe
grabcad
planetengetriebe
grabcad
free

Reisenauer Motor Chief Planetengetriebe 6:1
...reisenauer motor chief planetengetriebe 6:1
grabcad
reisenauer motor chief planetengetriebe 6:1
grabcad
free

Planetary Gear with belt Pulley (Planetengetriebe mit Riemen)
...netary gear with belt pulley (planetengetriebe mit riemen)
grabcad
planetary gear with belt pulley (planetengetriebe mit riemen)
grabcad
free

PHT VERTEX RAHH090-H-01 Winkelgetriebe mit Planetengetriebe
...hh090-h-01 winkelgetriebe mit planetengetriebe
grabcad
pht vertex rahh090-h-01 winkelgetriebe mit planetengetriebe mit hohlwelle
grabcad
free

Planetengetriebe 2-stufig i=-32
...lrad 2: zh2 =48
gesamtübersetzung i = -32
zur erstellung der verzahnung siehe separates tutorial "außenverzahnung ..."
3dwarehouse
free

Planetengetriebe - Epicyclic gearing *SketchyPhysics*
...physics*
3dwarehouse
simple epicyclic gearing like it's used in offroad vehicles... #car #fst #gear #hinge #off #road #truck
Janssen86
thingiverse
free

Parametrische Schnecke / Parametric Worm by janssen86
...d angle of worm. positive lead angle = clockwise thread rotation
zusammen_gebaut = assembled (1) or disassembled for printing (0)
thingiverse
free
Parametrische Zahnstange / Parametric Gear Rack by janssen86
...dard value = 20° according to din 867
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
thingiverse
free
Parametrisches Hohlrad / Parametric Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Kegelrad / Parametric Bevel Gear by janssen86
... = 20° according to din 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free
Parametrisches Stirnrad / Parametric Spur gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free
Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free
RC gears for N20 motor by ka3ros
...pfeilrad / parametric herringbone spur gear" openscad library from janssen86 one 12mm wide for the motor and one 16mm...
thingiverse
free
Parametrisches Kegelrad-Paar / Parametric Pair of Bevel Gears by janssen86
...eeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (1) oder disassembled for printing (0)
thingiverse
free
Parametrisches Pfeil-Hohlrad / Parametric Herringbone Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Pfeil-Kegelrad / Parametric Herringbone Bevel Gear by janssen86
... according to din 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
Parametrisches
thingiverse
free

Parametrischer Becher by urbenan
...parametrischer becher by urbenan
thingiverse
parametrischer becher
thingiverse
free

Holzkiste parametrisches Design
...holzkiste parametrisches design
thingiverse
datei des rahmens
thingiverse
free

Parametric Cookie Cutter / Parametrischer Plätzchenausstecher by Crono
... cutter wont work. just check for infill in your walls at the slicing process.
printed mine in petg @ 0.1mm height on a prusa i3
thingiverse
free
Parametrische Schnecke / Parametric Worm by janssen86
...d angle of worm. positive lead angle = clockwise thread rotation
zusammen_gebaut = assembled (1) or disassembled for printing (0)
thingiverse
free
Parametrische Zahnstange / Parametric Gear Rack by janssen86
...dard value = 20° according to din 867
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
thingiverse
free

Trichter - einfach, parametrisch / Funnel - simple, parametric by Onkel_Pyrrhos
...; - dateien für blockscad und opensacd können jetzt auch eckige spiralförmige trichter mit beliebiger seitenzahl erstellt werden.
thingiverse
free
Parametrisches Hohlrad / Parametric Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Kegelrad / Parametric Bevel Gear by janssen86
... = 20° according to din 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free
Parametrisches Stirnrad / Parametric Spur gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free
Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
Herringbone
3ddd
$1

herringbone
...herringbone
3ddd
паркет ,качеств.текстура
design_connected
$16

Herringbone Rug
...herringbone rug
designconnected
dash & albert herringbone rug computer generated 3d model.
turbosquid
$5

Herringbone Arch
...ee 3d model herringbone arch for download as ma, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1578628)
turbosquid
$20

Herringbone farmhouse table
...free 3d model herringbone farmhouse table for download as lwo on turbosquid: 3d models for games, architecture, videos. (1309425)
turbosquid
$20

Herringbone Dining Table
...3d model herringbone dining table for download as 3dm and stl on turbosquid: 3d models for games, architecture, videos. (1640461)
turbosquid
$6

Herringbone Night Stand
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Паркет French herringbone | Французская елка (бесшовная)
...
3ddd
паркет , французская елка
паркет french herringbone | французская елка (бесшовная)
turbosquid
$20

CHAIR FOR LIVING ROOM ESTELA HERRINGBONE
... chair for living room estela herringbone for download as max on turbosquid: 3d models for games, architecture, videos. (1713152)
turbosquid
$9

Chalet Herringbone Flatwoven Orange Rug
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
cg_studio
$10

Herringbone Floor 32 WITHOUT PLUGINS3d model
...dular
.max .fbx - herringbone floor 32 without plugins 3d model, royalty free license available, instant download after purchase.
Planetary
3d_export
$7

planetary gearbox
...planetary gearbox
3dexport
planetary gearbox
3d_export
$12

planetary rover
...planetary rover
3dexport
low poly, game ready, planetary rover.<br>the model is rigged but not animated.
3d_export
$5
nw planetary reducer
...nw planetary reducer
3dexport
nw planetary reducer
turbosquid
$4

planetary gearbox
...royalty free 3d model planetary gearbox for download as blend on turbosquid: 3d models for games, architecture, videos. (1423384)
3d_ocean
$3

Planetary gears
...al applied and is ready to import and render in both all(blend/fbx/obj). there are two models, one of which is the exploded mo...
3d_export
$5
three stage planetary gearbox
...three stage planetary gearbox
3dexport
three stage planetary gearbox
3d_export
$15
Planetary gears 3D Model
...box automatic manual car engine power drive differential sprocket mechanical
planetary gears 3d model dragosburian 81058 3dexport
3d_export
free

tinket planetary transmission
...tinket planetary transmission
3dexport
3d_export
$30

Planetary system 3D Model
...planetary system 3d model
3dexport
planets sol system
planetary system 3d model psicore 64545 3dexport
turbosquid
$10

Planetary Pendant Lamp set
...free 3d model planetary pendant lamp set for download as max on turbosquid: 3d models for games, architecture, videos. (1475423)
Parametric
turbosquid
$25

Parametric
...oyalty free 3d model parametric for download as blend and stl on turbosquid: 3d models for games, architecture, videos. (1683196)
3ddd
$1

Parametric Wall
...parametric wall
3ddd
панель
parametric wall with shelf
3d_export
$5

parametric table
...parametric table
3dexport
parametric table model created on rhinoceros 6. this 3d model includes: .gh, .3dm files
turbosquid
$2

parametrical chandelier
...lty free 3d model parametrical chandelier for download as dxf on turbosquid: 3d models for games, architecture, videos. (1257635)
turbosquid
$2

Parametric Seat
...id
royalty free 3d model parametric seat for download as max on turbosquid: 3d models for games, architecture, videos. (1691557)
turbosquid
$2
Parametric Wall
...id
royalty free 3d model parametric wall for download as max on turbosquid: 3d models for games, architecture, videos. (1690373)
turbosquid
$1

Parametric Wall
...id
royalty free 3d model parametric wall for download as max on turbosquid: 3d models for games, architecture, videos. (1691303)
turbosquid
$1

Parametric Wall
...id
royalty free 3d model parametric wall for download as max on turbosquid: 3d models for games, architecture, videos. (1691148)
turbosquid
$19

Parametric Bench
...ty free 3d model parametric bench for download as max and max on turbosquid: 3d models for games, architecture, videos. (1713396)
turbosquid
free

Parametric wall
...ee 3d model parametric wall for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1356869)
Gear
3d_ocean
$4

Gears
...gears
3docean
gear gears iron
4 different size of gears
3d_export
$5

gear
...gear
3dexport
gear
3d_export
free

Gears
...gears
3dexport
gears
3d_export
$5

gear
...gear
3dexport
a simple model of gear
3d_export
$5

gear
...gear
3dexport
gear for transmission , case machine
3d_ocean
$3

Gears
...nical parts process steampunk vehicle wheel work
10 different gear models volume 01-10 files: .3ds .c4d .obj note: you need vray
3d_ocean
$1

Spur Gear
...spur gear
3docean
decoration gear
a typical spur gear
3d_ocean
$4

Gear wheels
...gear wheels
3docean
engine engineering gear gears industry machinery mechanical toothwheel wheel
pair of gear wheels : animated.
turbosquid
$9

Gear
...gear
turbosquid
royalty free 3d model gear for download as on turbosquid: 3d models for games, architecture, videos. (1712328)
turbosquid
$2

Gears
...rs
turbosquid
royalty free 3d model gears for download as ma on turbosquid: 3d models for games, architecture, videos. (1166710)