Thingiverse
Getriebe Bibliothek für OpenSCAD / Gears Library for OpenSCAD by janssen86
by Thingiverse
Last crawled date: 3 years ago
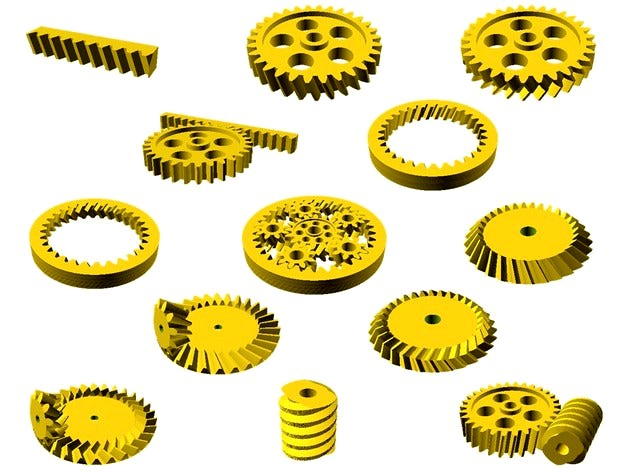
OpenSCAD Bibliothek für Evolventen-Zahnräder, Schnecken und Zahnstangen
Eine Bibliothek zur parametrischen Erzeugung von Stirn-, Hohl- und Kegelrädern, Schnecken und Zahnstangen sowie von Zusammensetzungen. Die deutschen Begriffe werden gemäß der Definitionen in DIN 868 verwendet.
Zu Begriffen und Geometrien, siehe auch:
Ferdinand Bodenstein und Horst Haberhauer: Maschinenelemente: Gestaltung, Berechnung, Anwendung. 13 Aufl. Springer-Verlag, Berlin 2006 - ISBN 3 540 22284 7
+++
OpenSCAD Library for Gear Racks, Involute and Worm Gears
A library for the parametric creation of gear racks, spur-, ring-, bevel- and worm gears, as well as of assemblies.
+++
+++
Parametrische Zahnstange
Erzeugt eine Zahnstange.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe der Zahnköpfe über der Wälzgeraden
laenge = Länge der Zahnstange
hoehe = Höhe der Zahnstange bis zur Wälzgeraden
breite = Breite der Zähne
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
schraegungswinkel = Schrägungswinkel zur Zahnstangen-Querachse; 0° = Geradverzahnung
+++
Parametric Gear Rack
Creates a gear rack.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = height of the tooth above the pitch line
laenge = length of the rack
hoehe = height from bottom to the pitch line
breite = face width
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867. Should not be greater than 45°.
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
+++
+++
Parametrisches Stirnrad mit Evolventen-Verzahnung
Erzeugt ein Stirnrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 867 / DIN 58400. Zwei Räder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Der Achsabstand zweier Stirnräder A und B mit Modul m, Zahnzahlen za und zb istm/2·(za + zb)
Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
stirnrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Zahnbreite
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel zur Rotationsachse; 0° = Geradverzahnung
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Involute Spur Gear
Creates an involute spur gear without profile displacement following DIN 867 / DIN 58400. Two gears will mesh if their modules are the same and their helix angles opposite. The centre distance of two meshing gears A and B with module m and tooth numbers za and zb ism/2·(za + zb)
Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
stirnrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrisches Pfeilrad mit Evolventenverzahnung
Erzeugt ein Stirnrad mit Pfeilverzahnung ohne Profilverschiebung. Zwei Räder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Der Achsabstand zweier Stirnräder mit Modul m und Zahnzahlen za und zb istm/2·(za + zb)
Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste.
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Zahnbreite
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Herringbone Involute Spur Gear
Creates a herringbone spur gear without profile displacement. Two gears will mesh if their modules are the same and their helix angles opposite. The centre distance of two meshing gears with module m and tooth numbers za and zb ism/2·(za + zb)
Herringbone gears run more smoothly than gears with straight teeth. They also do not create torque on the axis like helical gears do.
A helix angle, if used, should be set between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80 in the transverse section.
Format:
pfeilrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrische Zahnstange mit Ritzel
Erzeugt eine Zahnstange mit Ritzel.
Schrägverzahnte Räder/Zahnstangen laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Bei gegebenem Modul m und Zahnzahl des Ritzels zr beträgt der Abstand zwischen Ritzelachse und Wälzgerade der Zahnstangem/2·zr
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
zahnstange_und_ritzel (modul, laenge_stange, zahnzahl_ritzel, hoehe_stange, bohrung_ritzel, breite, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über der Wälzgeraden bzw. über dem Teilkreis
laenge_stange = Länge der Zahnstange
zahnzahl_ritzel = Anzahl der Radzähne
hoehe_stange = Höhe der Zahnstange bis zur Wälzgeraden
bohrung_ritzel = Durchmesser der Mittelbohrung des Ritzels
breite = Breite der Zähne
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
schraegungswinkel = Schrägungswinkel zur Zahnstangen-Querachse bzw. zur Rotationsachse des Ritzels; 0° = Geradverzahnung
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
+++
Parametric Gear Rack and Pinion
Creates a gear rack and pinion.
Helical gears / bevelled racks run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
With a given module m and zp teeth on the pinion, the distance between the pinion's axis and the rack's pitch line ism/2·zp
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch line/pitch circle = 25.4 / diametrical pitch = circular pitch / π
laenge_stange = length of the rack
zahnzahl_ritzel = number of teeth on the pinion
hoehe_stange = height from bottom to the pitch line
bohrung_ritzel = central bore diameter of the pinion
breite = face width
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = bevel angle perpendicular to the rack's length resp. helix angle to the rotation axis on the pinion; 0° = straight teeth
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Parametrisches Hohlrad mit Evolventenverzahnung
Erzeugt ein Hohlrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 3993. Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
hohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Breite der Zähne
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
+++
Parametric Involute Ring Gear
Creates a herringbone ring gear without profile displacement. Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
hohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
+++
+++
Parametrisches Pfeil-Hohlrad mit Evolventenverzahnung
Erzeugt ein Pfeil-Hohlrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 3993. Hohl- und Strinrad kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste.
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilhohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Face width
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
+++
Parametric Herringbone Involute Ring Gear
Creates a herringbone ring gear without profile displacement. A ring and spur gear mesh if they have the same module and opposite helix angels. Herringbone gears run more smoothly than gear with straight teeth. They also do not create axial load like helical gears do.
A helix angle, if used, should be set between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80° in the transverse section.
Format:
pfeilhohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
+++
+++
Parametrisches Planetengetriebe mit Evolventen-Pfeilverzahnung
Dieses Skript berechnet sowohl das Hohlrad als auch, wenn gewünscht, die Anzahl und Geometrie der Planetenräder aus den Zahnzahlen für Sonne und Planeten. Bei Modul m und Zahnzahlen von Sonne zs und Planeten zp beträgt der Abstand der Achsenm/2·(zs + zp)
Wenn m das Modul ist, zs Zahnzahl der Sonne, zp Zahnzahl der Planeten und br die Randbreite, dann beträgt der Außendurchmesser m·(zs+2zp+2.333)+2br
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Wenn keine Anzahl von Planetenrädern angegeben wird (anzahl_planeten = 0), versucht das Modul, diese zu berechnen.
Um beim 3D-Druck ein Verkleben der besonders der Planetenräder mit dem Hohlrad zu vermeiden, kann das Getriebe auseinander gebaut gedruckt werden (zusammen gebaut = false). Dabei ist zu beachten, dass eine Pfeilverzahnung den Zusammenbau erschwert. Erfahrungsgemäß ist dies bei 30° noch möglich; sollte es hier jedoch zu Problemen kommen, dann ist ein geringerer Schrägungswinkel zu wählen. Natürlich kann man auch Geradverzahnung wählen (Schraegungswinkel = 0°).
Außerdem kann ein Verkleben durch ein ausreichend großes Spiel vermieden werden; ein ausreichendes Spiel vermeidet auch Probleme beim Kämmen. Das Spiel kann um so kleiner bleiben, je besser die Auflösung des 3D-Druckers ist, sollte erfahrungsgemäß 5% jedoch nicht unterschreiten.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
spiel = Spiel zwischen Zahnflanken als Bruch der Gesamtbreite (0 = kein Spiel)
modul = Höhe des Zahnkopfes über dem Teilkegel
zahnzahl_sonne = Anzahl der Zähne des Sonnenrads
zahnzahl_planet = Anzahl der Zähne eines Planetenrads
anzahl_planeten = Anzahl der Planetenräder; wenn null, versucht das script die kleinste zahl Räder zu berechnen
breite = Zahnbreite
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel (Geradverzahnung)
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Planetary Gear using Involute Tooth Geometry and Herringbone Shape
This script calculates both the ring gear as well as, if required, the number and geometry of the planetary gears from the number of teeth on the sun and planets. For a module of m, zs teeth for the sun and zp teeth for the planets, the centre distance will bem/2·(zs + zp)
If the number of planets is set to zero (anzahl_planeten = 0) then the module will try and calculate them.
For a module of m, zs teeth for the sun, zp teeth for the planets and a rim width of br, the outer diameter is m·(zs+2zp+2.333)+2br
The helix angle should be between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle 20° becomes a pressure angle of 22.80° in the transverse section.
If no number of gears is given (anzahl_planeten = 0), then the script will attempt to calculate the least number of planet gears.
To avoid the gears sticking in a 3D print, particularly sticking of the planet gears to the ring gear, the gears can be printed in disassembled layout (zusammen gebaut = false). In that case, please note that herringbone teeth complicate the re-assembly. Experience shows that reassembly is still possible at 30°; however in case of reassembly problems, a lesser helix angle should be selected. Of course, one could always choose straight teeth (Schraegungswinkel = 0).
The gears can also be kept from sticking by a sufficiently large clearance ("Spiel"); a sufficient clearance also avoids meshing problems. Clearance can be left smaller if the 3D printer offers good resolution, however experience shows that it should not be less than 5%.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameters:
spiel = clearance between teeth as a fraction of their width (0 = no clearance)
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_sonne = number of teeth on the sun gear
zahnzahl_planet = number of teeth per planet gear
anzahl_planeten = number of planet gears; if set to zero, the script will attempt to calculate the least number of planet gears
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
zusammen_gebaut = components assembled for construction (true) or disassembled (false) for 3D printing
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrisches Kegelrad mit Kugelevolventen-Verzahnung
Dieses Skript erzeugt ein Kegelrad mit Kugelevolventen-Verzahnung. Zwei Kegelräder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
kegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl = Anzahl der Radzähne
teilkegelwinkel = (Halb)winkel des Kegels, auf dem das jeweils andere Kegelrad abrollt
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
Parametric Bevel Gear with Spherical Involute Geometry
This script creates a bevel gear with spherical involute geometry. Two gears will mesh if their modules are the same and their helix angles opposite. Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
kegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the gear teeth above he pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
teilkegelwinkel = reference cone (half-)angle
zahnbreite = width of teth from the rim in direction of the reference cone tip
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
+++
+++
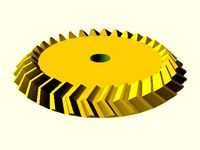
Parametrisches Pfeil-Kegelrad mit Kugelevolventen-Verzahnung
Dieses Skript erzeugt ein Pfeil-Kegelrad mit Kugelevolventen-Verzahnung. Zwei Kegelräder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilkegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl = Anzahl der Radzähne
teilkegelwinkel = (Halb)winkel des Kegels, auf dem das jeweils andere Kegelrad abrollt
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
+++
Parametric Herringbone Bevel Gear with Spherical Involute Geometry
This script creates a herringbone bevel gear with spherical involute teeth geometry. Two gears will mesh if their modules are the same and their helix angles opposite. Herringbone gears run more smoothly than gear with straight teeth. They also do not create axial load like helical gears do. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80° in the transverse section.
Format:
pfeilkegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
teilkegelwinkel = reference cone (half-)angle
zahnbreite = width of teeth from the rim in direction of the reference cone tip
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
+++
+++
Parametrisches Paar von Kegelrädern
Dieses Skript berechnet ein Paar von Kegelrädern aus dem Modul sowie der Anzahl der Zähne für Rad und Ritzel. Der voreingestellte Winkel von 90° zwischen den Achsen beider Räder kann variiert werden. Es ist möglich, die Geometrie sowohl zusammengesetzt als auch zum Drucken auseinander gelegt zu berechnen.
Format:
kegelradpaar(modul, zahnzahl_rad, zahnzahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl_rad = Anzahl der Radzähne am Rad
zahnzahl_ritzel = Anzahl der Radzähne am Ritzel
achsenwinkel = Winkel zwischen den Achsen von Rad und Ritzel, Standardwert = 90°
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung_rad = Durchmesser der Mittelbohrung des Rads
bohrung_ritzel = Durchmesser der Mittelbohrungen des Ritzels
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
zusammen_gebaut = Zusammen gebaut (wahr) oder zum Drucken getrennt (falsch)
+++
Parametric Pair of Bevel Gears
This script calculates both the gear and the pinion of a bevel gear pair, using the gears' module and their numbers of teeth. The preset angle of 90° between the axes of both gears can be varied. It is possible to calculate the pair both assembled for design as well as disassembled for printing.
Format:
kegelradpaar(modul, zahnzahl_rad, zahnzahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_rad = number of teeth on the gear
zahnzahl_ritzel = number of teeth on the pinion
achsenwinkel = angle between the axes of pinion and gear, standard value = 90°
zahnbreite = width of the teeth from the rim in direction of the cone tip
bohrung_rad = central bore diameter of the gear
bohrung_ritzel = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (true) oder disassembled for printing (false)
+++
+++
Parametrisches Paar von Pfeil-Kegelrädern
Dieses Skript berechnet ein Paar von Pfeil-Kegelrädern aus dem Modul sowie der Anzahl der Zähne für Rad und Ritzel. Der voreingestellte Winkel von 90° zwischen den Achsen beider Räder kann variiert werden. Es ist möglich, die Geometrie sowohl zusammengesetzt als auch zum Drucken auseinander gelegt zu berechnen.
Format:
pfeilkegelradpaar(modul, zahnzahl_rad, zahnzsahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl_rad = Anzahl der Radzähne am Rad
zahnzahl_ritzel = Anzahl der Radzähne am Ritzel
achsenwinkel = Winkel zwischen den Achsen von Rad und Ritzel, Standardwert = 90°
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung_rad = Durchmesser der Mittelbohrung des Rads
bohrung_ritzel = Durchmesser der Mittelbohrungen des Ritzels
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
zusammen_gebaut = Zusammen gebaut (wahr) oder zum Drucken getrennt (falsch)
+++
Parametric Pair of Herringbone Bevel Gears
This script calculates both the gear and the pinion of a herringbone bevel gear pair, using the gears' module and their numbers of teeth. The preset angle of 90° between the axes of both gears can be varied. It is possible to calculate the pair both assembled for design as well as disassembled for printing.
Format:
pfeilkegelradpaar(modul, zahnzahl_rad, zahnzsahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_rad = number of teeth on the gear
zahnzahl_ritzel = number of teeth on the pinion
achsenwinkel = angle between the axes of pinion and gear, standard value = 90°
zahnbreite = width of the teeth from the rim in direction of the cone tip
bohrung_rad = central bore diameter of the gear
bohrung_ritzel = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Parametrische Schnecke
Erzeugt eine zylindrische Schnecke (archimedische Spirale) nach DIN 3975.
Der Radius r des Wälzkreises der Schnecke bei gegebenem Modul m, Gangzahl z und Steigungswinkel γ ist
r = m·z·1/2sinγ
Format:
schnecke(modul, gangzahl, laenge, bohrung, eingriffswinkel=20, steigungswinkel=10, zusammen_gebaut=true)
Parameter:
modul = Höhe des Schneckenkopfes über dem Teilzylinder
gangzahl = Anzahl der Gänge (Zähne) der Schnecke
laenge = Länge der Schnecke
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
steigungswinkel = Steigungswinkel der Schnecke, entspricht 90°minus Schrägungswinkel. Positiver Steigungswinkel = rechtsdrehend.
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
+++
Parametric Worm
Creates a cylidrical worm (archimedean spiral) following DIN 3975.
The worm's pitch circle r can be calculated out of its module m, number of threads z and lead angle γ:
r = m·z·1/2sinγ
Format:
schnecke(modul, gangzahl, laenge, bohrung, eingriffswinkel=20, steigungswinkel=10, zusammen_gebaut=true)
Parameters:
modul = height of the thread above the pitch circle
gangzahl = number of threads
laenge = length of the worm
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
steigungswinkel = lead angle of worm. Positive lead angle = clockwise thread rotation
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Schneckenradsatz (Schnecke und Stirnrad)
Berechnet einen Schneckenradsatz. Das Schneckenrad ist ein gewöhnliches Stirnrad ohne Globoidgeometrie.
Format:
module schneckenradsatz(modul, zahnzahl, gangzahl, breite, laenge, bohrung_schnecke, bohrung_rad, eingriffswinkel=20, steigungswinkel, optimiert=true, zusammen_gebaut=true)
Parameter:
modul = Höhe des Schneckenkopfes über dem Teilzylinder bzw. des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
gangzahl = Anzahl der Gänge (Zähne) der Schnecke
breite = Zahnbreite
laenge = Länge der Schnecke
bohrung_schnecke = Durchmesser der Mittelbohrung der Schnecke
bohrung_rad = Durchmesser der Mittelbohrung des Stirnrads
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
steigungswinkel = Steigungswinkel der Schnecke, entspricht 90°-Schrägungswinkel. Positiver Steigungswinkel = rechtsdrehend.
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis
zusammen_gebaut = Komponenten zusammengebaut für Konstruktion (wahr) oder auseinander (falsch) zum 3D-Druck
+++
Worm Gear Set (Worm and Pinion)
Creates a set of one worm gear and a pinion. The pinion is a normal spur gear without globoid geometry.
Format:
module schneckenradsatz(modul, zahnzahl, gangzahl, breite, laenge, bohrung_schnecke, bohrung_rad, eingriffswinkel=20, steigungswinkel, optimiert=true, zusammen_gebaut=true)
Parameter:
modul = gear module = and height of the gear teeth above th pitch circle / of the thread above the pitch circle
zahnzahl = number of teeth on the pinion
gangzahl = number of threads
breite = face width on the pinion
laenge = length of the worm
bohrung_schnecke = central bore diameter of the worm
bohrung_rad = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867. Shouldn't be greater than 45°
steigungswinkel = lead angle of worm. Positive lead angle = clockwise thread rotation
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
zusammen_gebaut = assembled (true) or disassembled for printing (false)
Eine Bibliothek zur parametrischen Erzeugung von Stirn-, Hohl- und Kegelrädern, Schnecken und Zahnstangen sowie von Zusammensetzungen. Die deutschen Begriffe werden gemäß der Definitionen in DIN 868 verwendet.
Zu Begriffen und Geometrien, siehe auch:
Ferdinand Bodenstein und Horst Haberhauer: Maschinenelemente: Gestaltung, Berechnung, Anwendung. 13 Aufl. Springer-Verlag, Berlin 2006 - ISBN 3 540 22284 7
+++
OpenSCAD Library for Gear Racks, Involute and Worm Gears
A library for the parametric creation of gear racks, spur-, ring-, bevel- and worm gears, as well as of assemblies.
+++
+++
Parametrische Zahnstange
Erzeugt eine Zahnstange.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe der Zahnköpfe über der Wälzgeraden
laenge = Länge der Zahnstange
hoehe = Höhe der Zahnstange bis zur Wälzgeraden
breite = Breite der Zähne
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
schraegungswinkel = Schrägungswinkel zur Zahnstangen-Querachse; 0° = Geradverzahnung
+++
Parametric Gear Rack
Creates a gear rack.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = height of the tooth above the pitch line
laenge = length of the rack
hoehe = height from bottom to the pitch line
breite = face width
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867. Should not be greater than 45°.
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
+++
+++
Parametrisches Stirnrad mit Evolventen-Verzahnung
Erzeugt ein Stirnrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 867 / DIN 58400. Zwei Räder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Der Achsabstand zweier Stirnräder A und B mit Modul m, Zahnzahlen za und zb istm/2·(za + zb)
Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
stirnrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Zahnbreite
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel zur Rotationsachse; 0° = Geradverzahnung
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Involute Spur Gear
Creates an involute spur gear without profile displacement following DIN 867 / DIN 58400. Two gears will mesh if their modules are the same and their helix angles opposite. The centre distance of two meshing gears A and B with module m and tooth numbers za and zb ism/2·(za + zb)
Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
stirnrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrisches Pfeilrad mit Evolventenverzahnung
Erzeugt ein Stirnrad mit Pfeilverzahnung ohne Profilverschiebung. Zwei Räder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Der Achsabstand zweier Stirnräder mit Modul m und Zahnzahlen za und zb istm/2·(za + zb)
Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste.
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Zahnbreite
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Herringbone Involute Spur Gear
Creates a herringbone spur gear without profile displacement. Two gears will mesh if their modules are the same and their helix angles opposite. The centre distance of two meshing gears with module m and tooth numbers za and zb ism/2·(za + zb)
Herringbone gears run more smoothly than gears with straight teeth. They also do not create torque on the axis like helical gears do.
A helix angle, if used, should be set between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80 in the transverse section.
Format:
pfeilrad (modul, zahnzahl, breite, bohrung, eingriffswinkel=20, schraegungswinkel=0, optimiert=true)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrische Zahnstange mit Ritzel
Erzeugt eine Zahnstange mit Ritzel.
Schrägverzahnte Räder/Zahnstangen laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Bei gegebenem Modul m und Zahnzahl des Ritzels zr beträgt der Abstand zwischen Ritzelachse und Wälzgerade der Zahnstangem/2·zr
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
zahnstange_und_ritzel (modul, laenge_stange, zahnzahl_ritzel, hoehe_stange, bohrung_ritzel, breite, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
modul = Höhe des Zahnkopfes über der Wälzgeraden bzw. über dem Teilkreis
laenge_stange = Länge der Zahnstange
zahnzahl_ritzel = Anzahl der Radzähne
hoehe_stange = Höhe der Zahnstange bis zur Wälzgeraden
bohrung_ritzel = Durchmesser der Mittelbohrung des Ritzels
breite = Breite der Zähne
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
schraegungswinkel = Schrägungswinkel zur Zahnstangen-Querachse bzw. zur Rotationsachse des Ritzels; 0° = Geradverzahnung
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
+++
Parametric Gear Rack and Pinion
Creates a gear rack and pinion.
Helical gears / bevelled racks run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
With a given module m and zp teeth on the pinion, the distance between the pinion's axis and the rack's pitch line ism/2·zp
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
zahnstange(modul, laenge, hoehe, breite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch line/pitch circle = 25.4 / diametrical pitch = circular pitch / π
laenge_stange = length of the rack
zahnzahl_ritzel = number of teeth on the pinion
hoehe_stange = height from bottom to the pitch line
bohrung_ritzel = central bore diameter of the pinion
breite = face width
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = bevel angle perpendicular to the rack's length resp. helix angle to the rotation axis on the pinion; 0° = straight teeth
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Parametrisches Hohlrad mit Evolventenverzahnung
Erzeugt ein Hohlrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 3993. Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
hohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Breite der Zähne
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
+++
Parametric Involute Ring Gear
Creates a herringbone ring gear without profile displacement. Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
hohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
+++
+++
Parametrisches Pfeil-Hohlrad mit Evolventenverzahnung
Erzeugt ein Pfeil-Hohlrad mit Evolventenverzahnung ohne Profilverschiebung nach DIN 3993. Hohl- und Strinrad kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste.
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilhohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
breite = Face width
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel, Standardwert = 0° (Geradverzahnung)
+++
Parametric Herringbone Involute Ring Gear
Creates a herringbone ring gear without profile displacement. A ring and spur gear mesh if they have the same module and opposite helix angels. Herringbone gears run more smoothly than gear with straight teeth. They also do not create axial load like helical gears do.
A helix angle, if used, should be set between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80° in the transverse section.
Format:
pfeilhohlrad(modul, zahnzahl, breite, randbreite, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
+++
+++
Parametrisches Planetengetriebe mit Evolventen-Pfeilverzahnung
Dieses Skript berechnet sowohl das Hohlrad als auch, wenn gewünscht, die Anzahl und Geometrie der Planetenräder aus den Zahnzahlen für Sonne und Planeten. Bei Modul m und Zahnzahlen von Sonne zs und Planeten zp beträgt der Abstand der Achsenm/2·(zs + zp)
Wenn m das Modul ist, zs Zahnzahl der Sonne, zp Zahnzahl der Planeten und br die Randbreite, dann beträgt der Außendurchmesser m·(zs+2zp+2.333)+2br
Der Schrägungswinkel sollte zwischen zwischen 30° und 45° liegen. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978. Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Wenn keine Anzahl von Planetenrädern angegeben wird (anzahl_planeten = 0), versucht das Modul, diese zu berechnen.
Um beim 3D-Druck ein Verkleben der besonders der Planetenräder mit dem Hohlrad zu vermeiden, kann das Getriebe auseinander gebaut gedruckt werden (zusammen gebaut = false). Dabei ist zu beachten, dass eine Pfeilverzahnung den Zusammenbau erschwert. Erfahrungsgemäß ist dies bei 30° noch möglich; sollte es hier jedoch zu Problemen kommen, dann ist ein geringerer Schrägungswinkel zu wählen. Natürlich kann man auch Geradverzahnung wählen (Schraegungswinkel = 0°).
Außerdem kann ein Verkleben durch ein ausreichend großes Spiel vermieden werden; ein ausreichendes Spiel vermeidet auch Probleme beim Kämmen. Das Spiel kann um so kleiner bleiben, je besser die Auflösung des 3D-Druckers ist, sollte erfahrungsgemäß 5% jedoch nicht unterschreiten.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameter:
spiel = Spiel zwischen Zahnflanken als Bruch der Gesamtbreite (0 = kein Spiel)
modul = Höhe des Zahnkopfes über dem Teilkegel
zahnzahl_sonne = Anzahl der Zähne des Sonnenrads
zahnzahl_planet = Anzahl der Zähne eines Planetenrads
anzahl_planeten = Anzahl der Planetenräder; wenn null, versucht das script die kleinste zahl Räder zu berechnen
breite = Zahnbreite
randbreite = Breite des Randes ab Fußkreis
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Schrägungswinkel (Geradverzahnung)
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis bzw. Oberflächenvergößerung erzeugen, wenn Geometrie erlaubt
+++
Parametric Planetary Gear using Involute Tooth Geometry and Herringbone Shape
This script calculates both the ring gear as well as, if required, the number and geometry of the planetary gears from the number of teeth on the sun and planets. For a module of m, zs teeth for the sun and zp teeth for the planets, the centre distance will bem/2·(zs + zp)
If the number of planets is set to zero (anzahl_planeten = 0) then the module will try and calculate them.
For a module of m, zs teeth for the sun, zp teeth for the planets and a rim width of br, the outer diameter is m·(zs+2zp+2.333)+2br
The helix angle should be between between 30° and 45°. Recommendations for the helix angle depending on the module can be found in DIN 3978. This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle 20° becomes a pressure angle of 22.80° in the transverse section.
If no number of gears is given (anzahl_planeten = 0), then the script will attempt to calculate the least number of planet gears.
To avoid the gears sticking in a 3D print, particularly sticking of the planet gears to the ring gear, the gears can be printed in disassembled layout (zusammen gebaut = false). In that case, please note that herringbone teeth complicate the re-assembly. Experience shows that reassembly is still possible at 30°; however in case of reassembly problems, a lesser helix angle should be selected. Of course, one could always choose straight teeth (Schraegungswinkel = 0).
The gears can also be kept from sticking by a sufficiently large clearance ("Spiel"); a sufficient clearance also avoids meshing problems. Clearance can be left smaller if the 3D printer offers good resolution, however experience shows that it should not be less than 5%.
Format:
planetengetriebe(modul, zahnzahl_sonne, zahnzahl_planet, breite, randbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0, zusammen_gebaut=true, optimiert=true)
Parameters:
spiel = clearance between teeth as a fraction of their width (0 = no clearance)
modul = gear module = height of the tooth above the pitch circle = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_sonne = number of teeth on the sun gear
zahnzahl_planet = number of teeth per planet gear
anzahl_planeten = number of planet gears; if set to zero, the script will attempt to calculate the least number of planet gears
breite = face width
randbreite = width of the rim around the ring gear, measured from the root circle
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
zusammen_gebaut = components assembled for construction (true) or disassembled (false) for 3D printing
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
+++
+++
Parametrisches Kegelrad mit Kugelevolventen-Verzahnung
Dieses Skript erzeugt ein Kegelrad mit Kugelevolventen-Verzahnung. Zwei Kegelräder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Schrägverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen jedoch eine belastende Axialkraft, die durch die Achslager ausgeglichen werden muss. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 21,17° im Stirnschnitt bei 20° Schrägungswinkel.
Format:
kegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl = Anzahl der Radzähne
teilkegelwinkel = (Halb)winkel des Kegels, auf dem das jeweils andere Kegelrad abrollt
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
Parametric Bevel Gear with Spherical Involute Geometry
This script creates a bevel gear with spherical involute geometry. Two gears will mesh if their modules are the same and their helix angles opposite. Helical gears run more smoothly than gears with straight teeth. However, they also create axial loads which the bearings must be designed to contain. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 20° helix angle, a pressure angle of 20° becomes a pressure angle of 21.17° in the transverse section.
Format:
kegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the gear teeth above he pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
teilkegelwinkel = reference cone (half-)angle
zahnbreite = width of teth from the rim in direction of the reference cone tip
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
+++
+++
Parametrisches Pfeil-Kegelrad mit Kugelevolventen-Verzahnung
Dieses Skript erzeugt ein Pfeil-Kegelrad mit Kugelevolventen-Verzahnung. Zwei Kegelräder kämmen, wenn sie das gleiche Modul und entgegen gesetzten Schrägungswinkel aufweisen. Pfeilverzahnte Räder laufen ruhiger als geradverzahnte Räder. Sie erzeugen, anders als schrägverzahnte Räder, keine belastende Axialkraft, die durch die Achslager ausgeglichen werden müsste. Empfehlungen für Schrägungswinkel abhängig vom Modul findet man in DIN 3978.
Das Skript passt den Eingriffswinkel im Stirnschnitt an den Schrägungswinkel an, d.h. 20° Eingriffswinkel werden zu 22,80° im Stirnschnitt bei 30° Schrägungswinkel.
Format:
pfeilkegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl = Anzahl der Radzähne
teilkegelwinkel = (Halb)winkel des Kegels, auf dem das jeweils andere Kegelrad abrollt
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
+++
Parametric Herringbone Bevel Gear with Spherical Involute Geometry
This script creates a herringbone bevel gear with spherical involute teeth geometry. Two gears will mesh if their modules are the same and their helix angles opposite. Herringbone gears run more smoothly than gear with straight teeth. They also do not create axial load like helical gears do. Recommendations for the helix angle depending on the module can be found in DIN 3978.
This script adjusts the pressure angle in the transverse section to the helix angle: e.g. with a 30° helix angle, a pressure angle of 20° becomes a pressure angle of 22.80° in the transverse section.
Format:
pfeilkegelrad(modul, zahnzahl, teilkegelwinkel, zahnbreite, bohrung, eingriffswinkel=20, schraegungswinkel=0)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl = number of teeth
teilkegelwinkel = reference cone (half-)angle
zahnbreite = width of teeth from the rim in direction of the reference cone tip
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
+++
+++
Parametrisches Paar von Kegelrädern
Dieses Skript berechnet ein Paar von Kegelrädern aus dem Modul sowie der Anzahl der Zähne für Rad und Ritzel. Der voreingestellte Winkel von 90° zwischen den Achsen beider Räder kann variiert werden. Es ist möglich, die Geometrie sowohl zusammengesetzt als auch zum Drucken auseinander gelegt zu berechnen.
Format:
kegelradpaar(modul, zahnzahl_rad, zahnzahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl_rad = Anzahl der Radzähne am Rad
zahnzahl_ritzel = Anzahl der Radzähne am Ritzel
achsenwinkel = Winkel zwischen den Achsen von Rad und Ritzel, Standardwert = 90°
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung_rad = Durchmesser der Mittelbohrung des Rads
bohrung_ritzel = Durchmesser der Mittelbohrungen des Ritzels
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
zusammen_gebaut = Zusammen gebaut (wahr) oder zum Drucken getrennt (falsch)
+++
Parametric Pair of Bevel Gears
This script calculates both the gear and the pinion of a bevel gear pair, using the gears' module and their numbers of teeth. The preset angle of 90° between the axes of both gears can be varied. It is possible to calculate the pair both assembled for design as well as disassembled for printing.
Format:
kegelradpaar(modul, zahnzahl_rad, zahnzahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_rad = number of teeth on the gear
zahnzahl_ritzel = number of teeth on the pinion
achsenwinkel = angle between the axes of pinion and gear, standard value = 90°
zahnbreite = width of the teeth from the rim in direction of the cone tip
bohrung_rad = central bore diameter of the gear
bohrung_ritzel = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (true) oder disassembled for printing (false)
+++
+++
Parametrisches Paar von Pfeil-Kegelrädern
Dieses Skript berechnet ein Paar von Pfeil-Kegelrädern aus dem Modul sowie der Anzahl der Zähne für Rad und Ritzel. Der voreingestellte Winkel von 90° zwischen den Achsen beider Räder kann variiert werden. Es ist möglich, die Geometrie sowohl zusammengesetzt als auch zum Drucken auseinander gelegt zu berechnen.
Format:
pfeilkegelradpaar(modul, zahnzahl_rad, zahnzsahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameter:
modul = Höhe des Zahnkopfes über dem Teilkegel; Angabe für die Aussenseite des Kegels
zahnzahl_rad = Anzahl der Radzähne am Rad
zahnzahl_ritzel = Anzahl der Radzähne am Ritzel
achsenwinkel = Winkel zwischen den Achsen von Rad und Ritzel, Standardwert = 90°
zahnbreite = Breite der Zähne von der Außenseite in Richtung Kegelspitze
bohrung_rad = Durchmesser der Mittelbohrung des Rads
bohrung_ritzel = Durchmesser der Mittelbohrungen des Ritzels
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867
schraegungswinkel = Winkel der Zähne zur Mantellinie des Teilkegels, 0° = Geradverzahnung
zusammen_gebaut = Zusammen gebaut (wahr) oder zum Drucken getrennt (falsch)
+++
Parametric Pair of Herringbone Bevel Gears
This script calculates both the gear and the pinion of a herringbone bevel gear pair, using the gears' module and their numbers of teeth. The preset angle of 90° between the axes of both gears can be varied. It is possible to calculate the pair both assembled for design as well as disassembled for printing.
Format:
pfeilkegelradpaar(modul, zahnzahl_rad, zahnzsahl_ritzel, achsenwinkel=90, zahnbreite, bohrung, eingriffswinkel = 20, schraegungswinkel=0, zusammen_gebaut=true)
Parameters:
modul = gear module = height of the gear teeth above the pitch cone = 25.4 / diametrical pitch = circular pitch / π
zahnzahl_rad = number of teeth on the gear
zahnzahl_ritzel = number of teeth on the pinion
achsenwinkel = angle between the axes of pinion and gear, standard value = 90°
zahnbreite = width of the teeth from the rim in direction of the cone tip
bohrung_rad = central bore diameter of the gear
bohrung_ritzel = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Parametrische Schnecke
Erzeugt eine zylindrische Schnecke (archimedische Spirale) nach DIN 3975.
Der Radius r des Wälzkreises der Schnecke bei gegebenem Modul m, Gangzahl z und Steigungswinkel γ ist
r = m·z·1/2sinγ
Format:
schnecke(modul, gangzahl, laenge, bohrung, eingriffswinkel=20, steigungswinkel=10, zusammen_gebaut=true)
Parameter:
modul = Höhe des Schneckenkopfes über dem Teilzylinder
gangzahl = Anzahl der Gänge (Zähne) der Schnecke
laenge = Länge der Schnecke
bohrung = Durchmesser der Mittelbohrung
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
steigungswinkel = Steigungswinkel der Schnecke, entspricht 90°minus Schrägungswinkel. Positiver Steigungswinkel = rechtsdrehend.
zusammen_gebaut = Komponenten zusammengebaut (wahr) für Konstruktion oder auseinander (falsch) zum 3D-Druck
+++
Parametric Worm
Creates a cylidrical worm (archimedean spiral) following DIN 3975.
The worm's pitch circle r can be calculated out of its module m, number of threads z and lead angle γ:
r = m·z·1/2sinγ
Format:
schnecke(modul, gangzahl, laenge, bohrung, eingriffswinkel=20, steigungswinkel=10, zusammen_gebaut=true)
Parameters:
modul = height of the thread above the pitch circle
gangzahl = number of threads
laenge = length of the worm
bohrung = central bore diameter
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867
steigungswinkel = lead angle of worm. Positive lead angle = clockwise thread rotation
zusammen_gebaut = assembled (true) or disassembled for printing (false)
+++
+++
Schneckenradsatz (Schnecke und Stirnrad)
Berechnet einen Schneckenradsatz. Das Schneckenrad ist ein gewöhnliches Stirnrad ohne Globoidgeometrie.
Format:
module schneckenradsatz(modul, zahnzahl, gangzahl, breite, laenge, bohrung_schnecke, bohrung_rad, eingriffswinkel=20, steigungswinkel, optimiert=true, zusammen_gebaut=true)
Parameter:
modul = Höhe des Schneckenkopfes über dem Teilzylinder bzw. des Zahnkopfes über dem Teilkreis
zahnzahl = Anzahl der Radzähne
gangzahl = Anzahl der Gänge (Zähne) der Schnecke
breite = Zahnbreite
laenge = Länge der Schnecke
bohrung_schnecke = Durchmesser der Mittelbohrung der Schnecke
bohrung_rad = Durchmesser der Mittelbohrung des Stirnrads
eingriffswinkel = Eingriffswinkel, Standardwert = 20° gemäß DIN 867. Sollte nicht größer als 45° sein.
steigungswinkel = Steigungswinkel der Schnecke, entspricht 90°-Schrägungswinkel. Positiver Steigungswinkel = rechtsdrehend.
optimiert = wenn wahr, Löcher zur Material-/Gewichtsersparnis
zusammen_gebaut = Komponenten zusammengebaut für Konstruktion (wahr) oder auseinander (falsch) zum 3D-Druck
+++
Worm Gear Set (Worm and Pinion)
Creates a set of one worm gear and a pinion. The pinion is a normal spur gear without globoid geometry.
Format:
module schneckenradsatz(modul, zahnzahl, gangzahl, breite, laenge, bohrung_schnecke, bohrung_rad, eingriffswinkel=20, steigungswinkel, optimiert=true, zusammen_gebaut=true)
Parameter:
modul = gear module = and height of the gear teeth above th pitch circle / of the thread above the pitch circle
zahnzahl = number of teeth on the pinion
gangzahl = number of threads
breite = face width on the pinion
laenge = length of the worm
bohrung_schnecke = central bore diameter of the worm
bohrung_rad = central bore diameter of the pinion
eingriffswinkel = pressure angle, standard value = 20° according to DIN 867. Shouldn't be greater than 45°
steigungswinkel = lead angle of worm. Positive lead angle = clockwise thread rotation
optimiert = if true, create holes for material/weight reduction resp. surface increase, if geometry allows
zusammen_gebaut = assembled (true) or disassembled for printing (false)
Similar models
thingiverse
free

Parametrisches Stirnrad / Parametric Spur gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

Parametrisches Hohlrad / Parametric Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Pfeil-Kegelrad / Parametric Herringbone Bevel Gear by janssen86
... according to din 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free

Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

Parametrische Zahnstange / Parametric Gear Rack by janssen86
...dard value = 20° according to din 867
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
thingiverse
free

Parametrisches Pfeil-Hohlrad / Parametric Herringbone Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free

Parametrisches Kegelrad / Parametric Bevel Gear by janssen86
... = 20° according to din 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free

Parametrische Zahnstange mit Ritzel / Parametric Gear Rack and Pinion by janssen86
...ix angle to the rotation axis on the pinion; 0° = straight teeth
zusammen_gebaut = assembled (1) or disassembled for printing (0)
thingiverse
free

Parametrisches Kegelrad-Paar / Parametric Pair of Bevel Gears by janssen86
...eeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (1) oder disassembled for printing (0)
thingiverse
free

Parametrisches Pfeil-Kegelradpaar / Parametric Pair of Herringbone Bevel Gears by janssen86
... teeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (1) or disassembled for printing (0)
Janssen86
thingiverse
free

Parametrische Schnecke / Parametric Worm by janssen86
...d angle of worm. positive lead angle = clockwise thread rotation
zusammen_gebaut = assembled (1) or disassembled for printing (0)
thingiverse
free
Parametrische Zahnstange / Parametric Gear Rack by janssen86
...dard value = 20° according to din 867
schraegungswinkel = bevel angle perpendicular to the rack's length; 0° = straight teeth
thingiverse
free
Parametrisches Hohlrad / Parametric Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Kegelrad / Parametric Bevel Gear by janssen86
... = 20° according to din 867
schraegungswinkel = angle between the teeth and the reference cone envelope line, 0° = straight teeth
thingiverse
free
Parametrisches Stirnrad / Parametric Spur gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free
Parametrisches Pfeilrad / Parametric Herringbone Spur Gear by janssen86
... = straight teeth
optimiert = create holes for material/weight reduction resp. surface increase, if geometry allows (= 1 if true)
thingiverse
free

RC gears for N20 motor by ka3ros
...pfeilrad / parametric herringbone spur gear" openscad library from janssen86 one 12mm wide for the motor and one 16mm...
thingiverse
free
Parametrisches Kegelrad-Paar / Parametric Pair of Bevel Gears by janssen86
...eeth and the reference cone envelope line, 0° = straight teeth
zusammen_gebaut = assembled (1) oder disassembled for printing (0)
thingiverse
free
Parametrisches Pfeil-Hohlrad / Parametric Herringbone Ring Gear by janssen86
...essure angle, standard value = 20° according to din 867
schraegungswinkel = helix angle to the rotation axis; 0° = straight teeth
thingiverse
free
Parametrisches Pfeil-Kegelrad / Parametric Herringbone Bevel Gear by janssen86
... according to din 867
schraegungswinkel = helix angle between the teeth and the reference cone envelope line, 0° = straight teeth
Bibliothek
thingiverse
free

MTG Magic The Gathering Deck Box Card Holder for 60+ sleeved Cards by ven78
...the gathering) trading cards. 2 parts: ++ friedhof ++ bibliothek ++ graveyard ++ library you can put them together...
thingiverse
free

3D Printer Monitor for OctoPrint Wemos D1 ESP8266 (German description)
...ide because there was a change of one embedded bibliothek (json) and i could not make it running. so...
thingiverse
free

Acceleration Amulet by Tinkerpete
...mah lipo akku. leider bleibt nach dem laden der bibliothek für den mma8451 kaum noch platz für eigenen programmcode...
grabcad
free

Noro Bibliothek
...noro bibliothek
grabcad
noro laufrohr und formteile
grabcad
free

Lego Railway Indusimagnet
...numbers takip et bricklink - convention. siehe lego -. bibliothek / werkzeuge für inventor die hauptteile stammen von dk,...
grabcad
free

Lego- railway loading gauge
...numbers takip et bricklink - convention. siehe lego -. bibliothek / werkzeuge für inventor die hauptteile stammen von dk,...
grabcad
free

LEGO THW-Strassenhobel
...nummern takip et bricklink - konvention. siehe lego -. bibliothek / tools für inventor die hauptteile stammen von dk,...
grabcad
free

LEGO THW-Zweiwegebagger
...nummern takip et bricklink - konvention. siehe lego -. bibliothek / tools für inventor die hauptteile stammen von dk,...
grabcad
free

LEGO THW-Baggerramme
...nummern takip et bricklink - konvention. siehe lego -. bibliothek / tools für inventor die hauptteile stammen von dk,...
Getriebe
thingiverse
free

Stopfen für Ford Getriebe by Evolution500
...tion500
thingiverse
stopfen für das getriebe wenn die antriebswelle demontiert wird.
damit läuft dann nicht das ganze öl hinaus.
thingiverse
free

Motorspant T-Race 23 für Reisenauer Getriebe by Kippe
...ippe
thingiverse
motorspant für den t-race 23 von aer-o-tec
mit reisenauer micro edition getriebe.
und servobrett für kst ds 315
thingiverse
free

Dnepr & Ural Beluefter (Breather) für Getriebe und Endantriebe by cyboli
...system. rainproof and pressure washer proof. you need a 4mm diameter pneumatic tube and a qs-fitting screwed in the oil dipstick.
thingiverse
free

Front Motor Mount for RC Modelex Transmission Getriebe by domi1974
... and so i needed to design a mount. the part is from rc modelex. to mount it you need rails that have some spare mounting points.
thingiverse
free

Gearbox 256 / Getriebe 256 by CONSTRUCTeR
...ichten: 2
infill / fülldichte: 40 %
no support needed / keine stützkonstruktion nötig
https://www.youtube.com/watch?v=84odyuiceqc
thingiverse
free

Propeller for Planetary gear by Smuk3D
...gear by smuk3d thingiverse ein propeller fuer das planeten getriebe ...
thingiverse
free

Siku Control Getriebeschutz für Frontlader by tim786
...siku control getriebeschutz für frontlader by tim786
thingiverse
schützt das getriebe des frontladers vor verschmutzung.
thingiverse
free

Gearbox_Getriebe 4:1 by CrazyT87
...gearbox_getriebe 4:1 by crazyt87
thingiverse
getriebe 4:1 für wellendurchmesser 5mm
abstandshalter werden benötigt.
thingiverse
free

Kia Sorento JC by Clartos
...jc by clartos thingiverse kia sorento jc bj: 2005 getriebe elektrischer anklappbarer...
thingiverse
free

BBQ Fan Extension for Gearbox 256 / Grillgebläse Erweiterung für Getriebe 256 by CONSTRUCTeR
...ichten: 2
infill / fülldichte: 40 %
no support needed / keine stützkonstruktion nötig
https://www.youtube.com/watch?v=qsjrnm_caje
Openscad
thingiverse
free

OpenSCAD sphere
...openscad sphere
thingiverse
basic project for openscad.
thingiverse
free
Openscad Football by KySyth
...openscad football by kysyth
thingiverse
openscad not tested
thingiverse
free

Openscad Apple by KySyth
...openscad apple by kysyth
thingiverse
openscad apple = not tested
thingiverse
free

Plugs with openscad by benengel
...plugs with openscad by benengel
thingiverse
plugs with openscad and fontawesome
thingiverse
free
Openscad spirals by mafmuf
...openscad spirals by mafmuf
thingiverse
just fooling around with openscad.
thingiverse
free

Practice on OpenScad by ajensen906
...practice on openscad by ajensen906
thingiverse
a very crude practice on openscad
thingiverse
free
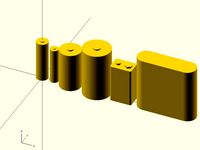
Batteries in OpenSCAD by roman_hegglin
...batteries in openscad by roman_hegglin
thingiverse
common batteries as modules for openscad.
thingiverse
free
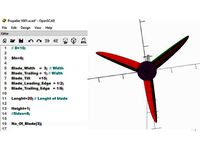
OpenScad Propeller by KySyth
...se
trying to make a propeller with openscad = not tested
this is some of the results
added the openscad file but still need work
thingiverse
free
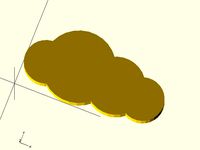
Openscad Cloud by Twanne
...openscad cloud by twanne
thingiverse
openscad cloud.
size can be adjusted
thingiverse
free
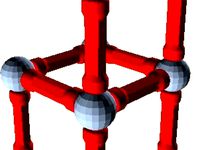
Geomag for OpenScad by vicnet
...geomag for openscad by vicnet
thingiverse
openscad file to design geomag things.
Für
turbosquid
free
Brot für die Welt
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
thingiverse
free
Brillenhalter V3 für 1 Brille für Doppelklebeband by piepsvo
...brillenhalter v3 für 1 brille für doppelklebeband by piepsvo
thingiverse
brillenhalter v3 für 1 brille für doppelklebeband
thingiverse
free

Halterung für 3DConnexion SpaceNavigator für Notebooks by herbert_b1
...ung für 3dconnexion spacenavigator für notebooks by herbert_b1
thingiverse
support for 3dconnexion spacenavigator for notebooks
thingiverse
free

Deckplatte für Playmobil Möbel (Schrank für Herd etc) by charly52
...kplatte für playmobil möbel (schrank für herd etc) by charly52
thingiverse
deckplatte für playmobil möbel (schrank für herd etc)
thingiverse
free

Haken für Kederschiene 7mm für Dtbd-Dachzelt by Paku_ia
...dtbd-dachzelt by paku_ia
thingiverse
haken für ddbd-dachzelt. zur montage wir die haken einfach in die kederleiste eingeschoben.
thingiverse
free

Öse für Kederschiene 7mm für Dtbd-Dachzelt by Paku_ia
...ia
thingiverse
besfestigungsöse für ddbd-dachzelt. zur montage wir die befestigungsöse einefach in die kederleiste eingeschoben.
thingiverse
free

Case für REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER by Rolfiklein
..._full_graphic_smart_controller by rolfiklein
thingiverse
gehäuse für das weit verbreitete grafik display mit schalter für licht.
thingiverse
free
Haken für Dusche by Pascal_1966
...haken für dusche by pascal_1966
thingiverse
haken für dusche
thingiverse
free

Printhalterung für Schaltschrank by nikibalboa
...printhalterung für schaltschrank by nikibalboa
thingiverse
platinenaufnahme für schienenmontage
thingiverse
free

Adapter für Schläuche by jensatweb
...adapter für schläuche by jensatweb
thingiverse
adapter für poolschläuche
Library
3d_ocean
$5

Library
...library
3docean
book book case library
library
3d_export
$6

library
...library
3dexport
a ready-made model of a library for use in peru
3d_ocean
$5

Library
...library
3docean
book books furniture home home design interior library
home design…
turbosquid
$15

library
...turbosquid
royalty free 3d model library for download as max on turbosquid: 3d models for games, architecture, videos. (1351741)
turbosquid
$9

Library
...turbosquid
royalty free 3d model library for download as max on turbosquid: 3d models for games, architecture, videos. (1433110)
turbosquid
$7

Library
...turbosquid
royalty free 3d model library for download as max on turbosquid: 3d models for games, architecture, videos. (1363568)
turbosquid
$5

Library
...turbosquid
royalty free 3d model library for download as max on turbosquid: 3d models for games, architecture, videos. (1309343)
3ddd
$1

classic library
...classic library
3ddd
library
classic library
3dsmax 2008 vray
3d_export
$10

Library
...library
3dexport
3d_export
free
library
...library
3dexport
Gears
3d_ocean
$4

Gears
...gears
3docean
gear gears iron
4 different size of gears
3d_export
$5

gear
...gear
3dexport
gear
3d_export
free

Gears
...gears
3dexport
gears
3d_export
$5

gear
...gear
3dexport
a simple model of gear
3d_export
$5

gear
...gear
3dexport
gear for transmission , case machine
3d_ocean
$3

Gears
...nical parts process steampunk vehicle wheel work
10 different gear models volume 01-10 files: .3ds .c4d .obj note: you need vray
3d_ocean
$1

Spur Gear
...spur gear
3docean
decoration gear
a typical spur gear
3d_ocean
$4

Gear wheels
...gear wheels 3docean engine engineering gear gears industry machinery mechanical toothwheel wheel pair of gear wheels...
turbosquid
$9

Gear
...gear
turbosquid
royalty free 3d model gear for download as on turbosquid: 3d models for games, architecture, videos. (1712328)
turbosquid
$2

Gears
...rs
turbosquid
royalty free 3d model gears for download as ma on turbosquid: 3d models for games, architecture, videos. (1166710)