Thingiverse

X550 Quadcopter by MazaaFIN
by Thingiverse
Last crawled date: 3 years ago
UPDATE 28.6.2016:
I've been busy last few months, hope to find time for this hobby and to finalize this project page
Motor mount holes are rotated 90° in ARM_ALT.STL
X550 is a Work-In-Progress - here's my To-Do list:
upload some video
more details on wiring (requires adjusting some cable lengths i.e. soldering and crimping new connectors)
APM:Copter-3.3 parameters I use with this setup
This is a remix from Brendan22's T4 Quadcopter
Soon after building my Prusa i3, I started printing T4 parts but found problems especially with arms because of heavy ABS warping and deforming. I started designing arms with more bonding surface and that meant the body needed changes too. While waiting for all the electronics I decided to redesign the whole frame. First frame was asymmetrical like T4 but I found problems when tuning it to stable hover. So I moved to X-style frame. Later I learned that center of thrust (CoT) needs to be coincident (or close enough) with center of gravity (CoG). Still wanted to stay with X-style frame as it felt better.
After a lot of tweaking and testing I found frame design that seems to work great.
550mm motor-to-motor distance allows to use 10-12" propellers (I use Gemfan 11x5" CF+Nylon props) and gives a bit more stable flight and better wind resistance.
The body has minimal unused space and has few dividing walls to make it more rigid.
FPV video Tx is located front left corner and receiver's antennas are positioned opposite to minimize possible RF-interference.
Battery compartment's end cap is held in place with screws as it makes frame more rigid and handles possible crashes better (the flight battery weights about 400g). The end cap has also place for velcro straps that are holding an auxiliary battery.
ø5mm carbon fiber tubes are used as GPS mast and long feet (required with gimball) for overall better performance. Feet are fixed to body with the same screws as arms.
For additional cover to Pixhawk and it's vulnerable cables and connectors I designed canopy mold that can be used with a vacuum forming machine.
CoG tends to be few mm's behind CoT when flying without G-3D gimball and GoPro - yet copter performs great. In fact I just got the G-3D gimball and made few adjustments to get it mounted properly.
As I found the frame performing excellent, I wanted to share it. Anyhow, most of the geometrical and mechanical design choices are copied from Brendan22's T4 Quadcopter. I give my respects.
This frame is designed to work with following gear:
Motors: NTM Prop Drive Series 28-30S 900kv or equivalent.
12x6E - 11.1v - 195W - 17.8A - 1.01kg thrust
11x7E - 11.1v - 188W - 17.0A - 0.89kg thrust
10x5E - 11.1v - 133W - 12.0A - 0.75kg thrust
Propellers: 10x4.5" - 11x5" (haven't tested 12" props yet)
Electronic Speed Controller (ESC) / BEC: Q Brain / Hobbywing Skywalker 4x25A
Flight Battery: Turnigy 3S 5000mAh (146x50x27mm compartment size)
Flight Computer: 3DR Pixhawk
GPS / compass: 3DR uBlox
Receiver: FrSky D4R-II
Optional gear:
3S auxiliary battery for LEDs, gimball and FPV gear (I use this)
4 x Super Bright 3W LED with Aluminium Heatsink (+ constant current driver)
Walkera G-3D 3-Axis Brushless Gimball + GoPro3 / iLook
Fatshark 600/700TVL CMOS FPV camera
MaxBotix MB1242 I2CXL-MaxSonar®-EZ4™ Ultrasonic sensor
ImmersionRC 25mW 5.8GHz A/V Tx
MinimOSD
Bluetooth Data Link for Pixhawk at least when using canopy
Required hardware:
8 x M3 40mm machine screw (arms)
8 x M3 nut + washer (arms)
20 (+2*) x ø3mm 12mm self-tapping screw for plastic (body, deck, bottom, gimball*)
1 x ø5mm 120mm carbon fiber tube (GPS stand)
4 x ø5mm 140mm carbon fiber tube (feet)
2 x ø3mm 135mm antenna tube (Rx)
2 x small rubber bands (A/V Tx and Rx)
few cm's double-sided tape, eq. Scotch® VHB™ (fixing electronics)
The self-tapping screws I used have been salvaged from broken stuff.http://de.screwerk.com/en/products/stp/stp32.html
Additional information:
WEIGHT PRINT TIME * FILAMENT USAGE (3mm)
Body 128g 11h 50min 20.45 m
Deck 37g 2h 30min 5.45 m
Bottom 46g 3h 20min 7.20 m
Arm (1) 44g 3h 15min 6.75 m
Feet (4) 25g 2h 20min 3.60 m
Canopy mold 4h 31min 12.15 m
TOTAL WEIGHT: (with gear listed above):
- without batteries (dry weight) 1170g
- with batteries 1675g
- with G-3D gimball and GoPro3 1975g
STABLE HOVER THROTTLE:
- with G-3D and GoPro3, 11x5" props about 52%
FLIGHT TIME: (using 4000mAh = 80% capacity):
- without G-3D gimball and GoPro3 ≤20min
- with G-3D gimball and GoPro3 ≤12min
MEASURED POWER CONSUMPTION:
FPV-gear + LEDs 450mA = 1h 45min of safe usage time with 1000mAh battery
FPV-gear + LEDs + G-3D 1.0A = 50min
(*) printed with E3D v6 Belt Driven Extruder.
I've been busy last few months, hope to find time for this hobby and to finalize this project page
Motor mount holes are rotated 90° in ARM_ALT.STL
X550 is a Work-In-Progress - here's my To-Do list:
upload some video
more details on wiring (requires adjusting some cable lengths i.e. soldering and crimping new connectors)
APM:Copter-3.3 parameters I use with this setup
This is a remix from Brendan22's T4 Quadcopter
Soon after building my Prusa i3, I started printing T4 parts but found problems especially with arms because of heavy ABS warping and deforming. I started designing arms with more bonding surface and that meant the body needed changes too. While waiting for all the electronics I decided to redesign the whole frame. First frame was asymmetrical like T4 but I found problems when tuning it to stable hover. So I moved to X-style frame. Later I learned that center of thrust (CoT) needs to be coincident (or close enough) with center of gravity (CoG). Still wanted to stay with X-style frame as it felt better.
After a lot of tweaking and testing I found frame design that seems to work great.
550mm motor-to-motor distance allows to use 10-12" propellers (I use Gemfan 11x5" CF+Nylon props) and gives a bit more stable flight and better wind resistance.
The body has minimal unused space and has few dividing walls to make it more rigid.
FPV video Tx is located front left corner and receiver's antennas are positioned opposite to minimize possible RF-interference.
Battery compartment's end cap is held in place with screws as it makes frame more rigid and handles possible crashes better (the flight battery weights about 400g). The end cap has also place for velcro straps that are holding an auxiliary battery.
ø5mm carbon fiber tubes are used as GPS mast and long feet (required with gimball) for overall better performance. Feet are fixed to body with the same screws as arms.
For additional cover to Pixhawk and it's vulnerable cables and connectors I designed canopy mold that can be used with a vacuum forming machine.
CoG tends to be few mm's behind CoT when flying without G-3D gimball and GoPro - yet copter performs great. In fact I just got the G-3D gimball and made few adjustments to get it mounted properly.
As I found the frame performing excellent, I wanted to share it. Anyhow, most of the geometrical and mechanical design choices are copied from Brendan22's T4 Quadcopter. I give my respects.
This frame is designed to work with following gear:
Motors: NTM Prop Drive Series 28-30S 900kv or equivalent.
12x6E - 11.1v - 195W - 17.8A - 1.01kg thrust
11x7E - 11.1v - 188W - 17.0A - 0.89kg thrust
10x5E - 11.1v - 133W - 12.0A - 0.75kg thrust
Propellers: 10x4.5" - 11x5" (haven't tested 12" props yet)
Electronic Speed Controller (ESC) / BEC: Q Brain / Hobbywing Skywalker 4x25A
Flight Battery: Turnigy 3S 5000mAh (146x50x27mm compartment size)
Flight Computer: 3DR Pixhawk
GPS / compass: 3DR uBlox
Receiver: FrSky D4R-II
Optional gear:
3S auxiliary battery for LEDs, gimball and FPV gear (I use this)
4 x Super Bright 3W LED with Aluminium Heatsink (+ constant current driver)
Walkera G-3D 3-Axis Brushless Gimball + GoPro3 / iLook
Fatshark 600/700TVL CMOS FPV camera
MaxBotix MB1242 I2CXL-MaxSonar®-EZ4™ Ultrasonic sensor
ImmersionRC 25mW 5.8GHz A/V Tx
MinimOSD
Bluetooth Data Link for Pixhawk at least when using canopy
Required hardware:
8 x M3 40mm machine screw (arms)
8 x M3 nut + washer (arms)
20 (+2*) x ø3mm 12mm self-tapping screw for plastic (body, deck, bottom, gimball*)
1 x ø5mm 120mm carbon fiber tube (GPS stand)
4 x ø5mm 140mm carbon fiber tube (feet)
2 x ø3mm 135mm antenna tube (Rx)
2 x small rubber bands (A/V Tx and Rx)
few cm's double-sided tape, eq. Scotch® VHB™ (fixing electronics)
The self-tapping screws I used have been salvaged from broken stuff.http://de.screwerk.com/en/products/stp/stp32.html
Additional information:
WEIGHT PRINT TIME * FILAMENT USAGE (3mm)
Body 128g 11h 50min 20.45 m
Deck 37g 2h 30min 5.45 m
Bottom 46g 3h 20min 7.20 m
Arm (1) 44g 3h 15min 6.75 m
Feet (4) 25g 2h 20min 3.60 m
Canopy mold 4h 31min 12.15 m
TOTAL WEIGHT: (with gear listed above):
- without batteries (dry weight) 1170g
- with batteries 1675g
- with G-3D gimball and GoPro3 1975g
STABLE HOVER THROTTLE:
- with G-3D and GoPro3, 11x5" props about 52%
FLIGHT TIME: (using 4000mAh = 80% capacity):
- without G-3D gimball and GoPro3 ≤20min
- with G-3D gimball and GoPro3 ≤12min
MEASURED POWER CONSUMPTION:
FPV-gear + LEDs 450mA = 1h 45min of safe usage time with 1000mAh battery
FPV-gear + LEDs + G-3D 1.0A = 50min
(*) printed with E3D v6 Belt Driven Extruder.
Similar models
thingiverse
free

TX8 Octocopter Drone (10" props) by Brendan22
...rot gimbal and go pro attached
another flight - at the river this time
tubular arm versus "conventional" arm design
thingiverse
free

Arrowhead Quad Copter FPV Frame by VooDooMoN
...n body. use the measurement tool for marking where to drill the holes for your arms.
also, i used m3 40mm screws for my copter.
thingiverse
free

T4 Quadcopter fpv camera mount by moose4621
...sing the existing mounting hole available when the gopro mount is also in use.
this allows fpv flights with or without the gopro.
thingiverse
free

Driblet X1 Micro FPV Quadcopter by Drib
...m motors: cl-0720-12
spektrum va1100
hubsan 380mah 1s lipo
hubsan x4 props
please let me know of any suggestions for improvement!
thingiverse
free

T4 Quadcopter Arm Remix for T-Motor Air Gear 350 by elkayem
...in the air gear 350 kit. this modification is similar to several other remixes for the...
thingiverse
free

X-UAV Talon Storm 32 3 Axis Gimbal Nose Mount by hakanaras
...9;m printing it on the printer right now. i will make the first flight in a few days and will be posting a video and photos here.
thingiverse
free

DJI P3 custom parts/quad build by toolman207
...different parts for my custom frame in time.
battery used in the pic's is bolt 1800mah hv lipo from hobbyking
gimbal is next
thingiverse
free

Gimbal Arm F550 Compact by fcheshire
...g the camera closer to the drone so i don't need tall landing gear. i moved the control board to the bottom of the main body.
3dwarehouse
free

Quadcopter servo gimbal fo sony fpv camera
...ony 900 lines camera and f450 flamewheel frame. i use a 9gmicro servo conected to the naza. #f450 #flamewheel #gimbal #quadcopter
thingiverse
free

T4 Quadcopter Drone by Brendan22
... i've updated t4arm.stl adding a small hole to allow a cable tie to be used for strain relief where the wires exit the motor.
X550
3d_export
$10

circular conveyor
...circular conveyor 3dexport ring conveyor 5800 x550 mainly used for electronic industry equipment testing, such as...
thingiverse
free

X550 Motormount by Forbidden89
...x550 motormount by forbidden89
thingiverse
this is a replacement of the original motormount for the x550 frame.
thingiverse
free

Bracket for Lenovo Intel X550-T2 on Lenovo ThinkCentre Tiny M920q/M720q and other Gen Tiny4 by ccl13
... onto lenovo thinkcentre m920q tiny.
it should fit most original design intel x550-t2 and most gen tiny4 lenovo thinkcentre tiny.
thingiverse
free

Motor Mount NTM Prop Drive and 15 X 15 mm aluminium profile. by sonsgutten
...28-26 1350kv / 310w on 15x15mm aluminium profile. original x550 glass fiber quadcopter frame 550mm, moded with new aluminium...
thingiverse
free

Linear Actuator large by Brucestephen
...for use with the ampflow e30-150 motor http://ampflow.com/three_inch_high_performance_motors.htm 1605/1610 x550 ballscrew https://www.ebay.com/sch/i.html?_odkw=ballscrew+1605&_osacat=0&_from=r40&_trksid=p2045573.m570.l1313.tr0.trc0.h0.xballscrew+1605+550.trs1&_nkw=ballscrew+1605+550&_sacat=0 bk12 bearing https://www.ebay.com/sch/i.html?_odkw=ballscrew+1605+550&_osacat=0&_from=r40&_trksid=p2045573.m570.l1311.r1.tr3.trc1.a0.h0.xbk12.trs0&_nkw=bk12+bf12&_sacat=0 two pieces of 20x60x500...
grabcad
free

Hobbyking x550
...hobbyking x550
grabcad
it's quadcopter frame from hobbyking
3dwarehouse
free

X550 Heaven Glow - frigate
...x550 heaven glow - frigate
3dwarehouse
x550 heaven glow, glow-class frigate, 230 m long, with a crew of 50.
3dwarehouse
free

잭슨카멜레온 디바인 사이드 테이블 JACKSONCHAMELEON DIVINE SIDE TABLE
...테이블 jacksonchameleon divine side table 3dwarehouse material steel size 500(w)x350(d)x550h)mm color black, almond,...
Mazaafin
thingiverse
free

O-Ring Sizing Cones by MazaaFIN
...eck the step diameter. i use the following sizing chart as a reference.
http://www.prepol.com/ppe-uploads/oring_sizes_din3771.pdf
thingiverse
free

Bottle Jack Valve Knob by MazaaFIN
...control the lowering speed of the boom - which is needed especially on heavy loads.
leave a comment if you need modified version.
thingiverse
free
Tube Clamp Jaws by MazaaFIN
...cating pins.
there's dimensional drawings to help making customized versions. i'm not familiar with openscad programming.
thingiverse
free
Smooth X-axis for LM10UU by MazaaFIN
...me (could make it 3mm wider for this)
use http://www.thingiverse.com/thing:1270385 to connect rework -type extruder to x-carriage
thingiverse
free

52mm Spindle Holder for MPCNC (IE / 25mm) by MazaaFIN
...t head screws (din912)
moved fixing screws a bit for more solid structure (?)
i'll update the picture when my mpcnc is ready!
thingiverse
free

SMA / RP-SMA connector Finger-Tightening Ring by MazaaFIN
... prints so there's another file with zero clearance
update: with basjohan's remix you can also make a customized version.
thingiverse
free
Geeetech Prusa i3 X Carriage
...i3 x carriage thingiverse carriage for the design from mazaafin smooth x-axis for prusa i3 with leadscrews...
thingiverse
free

X-Carriage-ENDSTOP by ant0ny
...in smooth x-axis for prusa i3 with leadscrews by mazaafin this is to use the original geeetech prusa i3...
thingiverse
free
Smooth X-axis for Prusa i3 with Leadscrews by MazaaFIN
...s)
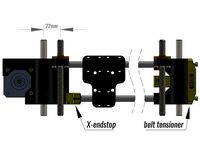
2 x m3 10-16mm hex socket screw (tensioner)
2 x m3 nut (tensioner)
1 x m4 20-30mm hex screw (tensioner)
1 x m4 nut (tensioner)
Quadcopter
3d_export
$5

quadcopter
...quadcopter
3dexport
futuristic quadcopter design.<br>original design davidflo 77
turbosquid
$19

quadcopter
...lty free 3d model quadcopter for download as max, ma, and obj on turbosquid: 3d models for games, architecture, videos. (1591426)
turbosquid
$25

QuadCopter
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5

Quadcopter 3D Model
...quadcopter 3d model
3dexport
quadcopter studio shaders
quadcopter 3d model vortex333 93968 3dexport
3d_export
$5

Quadcopter 3D Model
...quadcopter 3d model
3dexport
quadcopter aircraft helicopter
quadcopter 3d model greatghost 94019 3dexport
3d_export
$18

passenger quadcopter
... a multicopter is an aircraft built according to a helicopter scheme, with three or more rotors. previews rendered with redshift.
turbosquid
$159

Quadcopter Animated.
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$19

Drone Quadcopter
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$12

Drone Quadcopter
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$29

Quadcopter
...
questions about the continuation of the collection or the model can be asked here:<br>https://www.artstation.com/evgen_beg