Thingiverse
X-Y unit almost for free by WillemvD
by Thingiverse
Last crawled date: 3 years ago
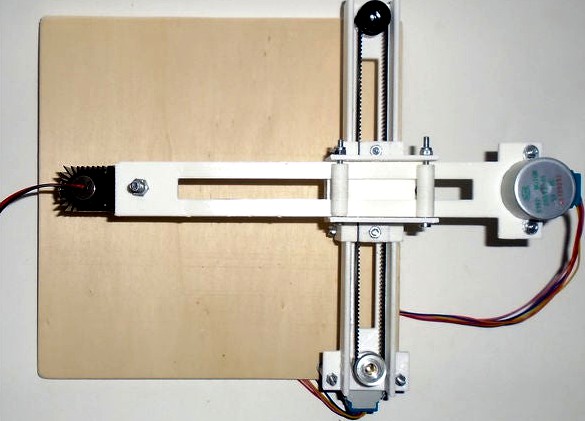
No linear bearings and steel shafts. but a printed rail. No expensive nema14 stepper, but a mini geared stepper motor that comes for an unbelievable price. The pulleys cost less than one dollar each and should have a bore of 5mm. All parts (except for the rollers) print in one run.
An ATtiny is excellent to control one axis. However, if you want to combine two linear systems to an X-Y plotter, you better use an Arduino board combined with two ULN2003 ic's. The motor and Arduino boards function very well at 4.5 volts (three AA or AAA batteries). Don't expect the highest grade of accuracy, much depends on the clearance between the rolls and the rail. Clean up the rolls by sanding them. If needed, increase the diameter with tape.
Combining two systems is easy if you use the cross to couple them.
Before combining two units with the cross, remove the rolls for easy access and reinstall them when finished.
Use some PTFE spray or grease to minimize friction.
The speed is excellent for laser engraving.https://youtu.be/KBsERsjMnhUhttps://youtu.be/fH1miyz9LqY
This sketch can be adapted by changeing the number of steps.
//NanoFull step mode
//512 >> 360 degrees 1.4 step/degree
int M1A = 2; int M1B = 3; int M1C = 4; int M1D = 5;
int M2A = 9; int M2B = 10; int M2C = 11; int M2D = 12;
int t=3;
void setup()
{
pinMode(M1A, OUTPUT); pinMode(M1B, OUTPUT); pinMode(M1C, OUTPUT); pinMode(M1D, OUTPUT);
pinMode(M2A, OUTPUT); pinMode(M2B, OUTPUT); pinMode(M2C, OUTPUT); pinMode(M2D, OUTPUT);
}
void loop()
{
//Motor 1
for (int x=0; x<20;x++){
digitalWrite(M1A, HIGH); digitalWrite(M1B, HIGH); digitalWrite(M1C, LOW); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, HIGH); digitalWrite(M1C, HIGH); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, LOW); digitalWrite(M1C, HIGH); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, HIGH); digitalWrite(M1B, LOW); digitalWrite(M1C, LOW); digitalWrite(M1D, HIGH); delay(t);}
for (int x=0; x<30;x++){
digitalWrite(M1A, HIGH); digitalWrite(M1B, LOW); digitalWrite(M1C, LOW); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, LOW); digitalWrite(M1C, HIGH); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, HIGH); digitalWrite(M1C, HIGH); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, HIGH); digitalWrite(M1B, HIGH); digitalWrite(M1C, LOW); digitalWrite(M1D, LOW); delay(t);}
//Motor 2
for (int x=0; x<20;x++){
digitalWrite(M2A, HIGH); digitalWrite(M2B, LOW); digitalWrite(M2C, LOW); digitalWrite(M2D, HIGH); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, HIGH); digitalWrite(M2C, LOW); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, HIGH); digitalWrite(M2C, HIGH); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, LOW); digitalWrite(M2C, HIGH); digitalWrite(M2D, HIGH); delay(t);}
for (int x=0; x<30;x++){
digitalWrite(M2A, LOW); digitalWrite(M2B, LOW); digitalWrite(M2C, HIGH); digitalWrite(M2D, HIGH); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, HIGH); digitalWrite(M2C, HIGH); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, HIGH); digitalWrite(M2C, LOW); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, LOW); digitalWrite(M2C, LOW); digitalWrite(M2D, HIGH); delay(t);}
}
An ATtiny is excellent to control one axis. However, if you want to combine two linear systems to an X-Y plotter, you better use an Arduino board combined with two ULN2003 ic's. The motor and Arduino boards function very well at 4.5 volts (three AA or AAA batteries). Don't expect the highest grade of accuracy, much depends on the clearance between the rolls and the rail. Clean up the rolls by sanding them. If needed, increase the diameter with tape.
Combining two systems is easy if you use the cross to couple them.
Before combining two units with the cross, remove the rolls for easy access and reinstall them when finished.
Use some PTFE spray or grease to minimize friction.
The speed is excellent for laser engraving.https://youtu.be/KBsERsjMnhUhttps://youtu.be/fH1miyz9LqY
This sketch can be adapted by changeing the number of steps.
//NanoFull step mode
//512 >> 360 degrees 1.4 step/degree
int M1A = 2; int M1B = 3; int M1C = 4; int M1D = 5;
int M2A = 9; int M2B = 10; int M2C = 11; int M2D = 12;
int t=3;
void setup()
{
pinMode(M1A, OUTPUT); pinMode(M1B, OUTPUT); pinMode(M1C, OUTPUT); pinMode(M1D, OUTPUT);
pinMode(M2A, OUTPUT); pinMode(M2B, OUTPUT); pinMode(M2C, OUTPUT); pinMode(M2D, OUTPUT);
}
void loop()
{
//Motor 1
for (int x=0; x<20;x++){
digitalWrite(M1A, HIGH); digitalWrite(M1B, HIGH); digitalWrite(M1C, LOW); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, HIGH); digitalWrite(M1C, HIGH); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, LOW); digitalWrite(M1C, HIGH); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, HIGH); digitalWrite(M1B, LOW); digitalWrite(M1C, LOW); digitalWrite(M1D, HIGH); delay(t);}
for (int x=0; x<30;x++){
digitalWrite(M1A, HIGH); digitalWrite(M1B, LOW); digitalWrite(M1C, LOW); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, LOW); digitalWrite(M1C, HIGH); digitalWrite(M1D, HIGH); delay(t);
digitalWrite(M1A, LOW); digitalWrite(M1B, HIGH); digitalWrite(M1C, HIGH); digitalWrite(M1D, LOW); delay(t);
digitalWrite(M1A, HIGH); digitalWrite(M1B, HIGH); digitalWrite(M1C, LOW); digitalWrite(M1D, LOW); delay(t);}
//Motor 2
for (int x=0; x<20;x++){
digitalWrite(M2A, HIGH); digitalWrite(M2B, LOW); digitalWrite(M2C, LOW); digitalWrite(M2D, HIGH); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, HIGH); digitalWrite(M2C, LOW); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, HIGH); digitalWrite(M2C, HIGH); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, LOW); digitalWrite(M2C, HIGH); digitalWrite(M2D, HIGH); delay(t);}
for (int x=0; x<30;x++){
digitalWrite(M2A, LOW); digitalWrite(M2B, LOW); digitalWrite(M2C, HIGH); digitalWrite(M2D, HIGH); delay(t);
digitalWrite(M2A, LOW); digitalWrite(M2B, HIGH); digitalWrite(M2C, HIGH); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, HIGH); digitalWrite(M2C, LOW); digitalWrite(M2D, LOW); delay(t);
digitalWrite(M2A, HIGH); digitalWrite(M2B, LOW); digitalWrite(M2C, LOW); digitalWrite(M2D, HIGH); delay(t);}
}
Similar models
thingiverse
free

"Marble Run" by WillemvD
...ay(t);
digitalwrite(m2a, high); digitalwrite(m2b, low); digitalwrite(m2c, low); digitalwrite(m2d, high); delay(t);}
delay(500);
}
thingiverse
free
3DX TRAFFIC LIGHT
...digitalwrite(ledg, low);
digitalwrite(ledy, high);
delay(3000);
digitalwrite(ledr, high);
digitalwrite(ledy, low);
delay(1000);
}
thingiverse
free

Chess Clock by WillemvD
...
digitalwrite(pin4, high); digitalwrite(pin5, low); digitalwrite(pin6, low); digitalwrite(pin7, high); delay(t);
delay(speed);}
}
thingiverse
free

Wheel of Fortune by WillemvD
...yservo.write(pos); delay(15); }
delay(2000);
for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); }
}
}
thingiverse
free

LikeYouPartyPin by WillemvD
..., low); delay(200);digitalwrite(eye, high);delay(200);
digitalwrite(mouthlow, low); digitalwrite(mouthhigh, low); delay(500); }}}
thingiverse
free

A Tracking Platform for Astrophotography by alex16
...delay(dl);
digitalwrite( in1, low );
digitalwrite( in2, low );
digitalwrite( in3, high );
digitalwrite( in4, high );
delay(dl);
}
thingiverse
free

3D printed induction motor controller with arduino by robogio
...write(b, high);
digitalwrite(c, high);
digitalwrite(d, low);
digitalwrite(e, high);
digitalwrite(f, low);
delaymicroseconds(t);
}
thingiverse
free

Two wheeled car by WillemvD
...w); delay(t);
digitalwrite(pin4, high); digitalwrite(pin5, low); digitalwrite(pin6, low); digitalwrite(pin7, high); delay(t); }
}
thingiverse
free

Advanced (Arduino controlled) Zoetrope by WillemvD
...); digitalwrite(sb1,high); digitalwrite(sb2,low); delay(s);}
digitalwrite(f,high);
delay(1); //short flash
digitalwrite(f,low);
}
thingiverse
free
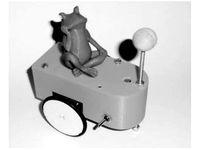
MiniFrogCar by WillemvD
...s gives better grip. the third wheel is just a m3 bolt with a rounded nut.
the frog is decoration and can be found on thigiverse.
Willemvd
thingiverse
free

MarbleFun by WillemvD
...marblefun by willemvd
thingiverse
https://youtu.be/hrd8kk79cdc
your (grand)children will love it!
thingiverse
free
MarbleMover by WillemvD
...marblemover by willemvd
thingiverse
https://youtu.be/hrd8kk79cdc
your (grand)children will love it!
thingiverse
free

Three in a row by WillemvD
...three in a row by willemvd
thingiverse
three in a row classic version.
thingiverse
free

Whistling propellor by WillemvD
...istling propellor by willemvd
thingiverse
https://youtu.be/qjzllndmnp4
a two component sound generator. works on a toy dc motor.
thingiverse
free

Candy Bucket by WillemvD
...y willemvd
thingiverse
printed buckets full of candy, carried by the robot. the kids will have fun.
https://youtu.be/sd_6ownlv54
thingiverse
free
Static Candy Dispenser by WillemvD
...static candy dispenser by willemvd
thingiverse
hopefully you do a better paint job.
thingiverse
free

EggcupPlus by WillemvD
....thingiverse.com/thing:606963
add a spoon holder and a place to put the shells and your easter table will look like never before.
thingiverse
free

Marble mania by WillemvD
...thingiverse
a marble in orbit...
https://youtu.be/reivgsk-oai
a drop of oil on the four contact points and the tip of the rotor.
thingiverse
free
ServoSpirograph by WillemvD
...
by changing the parameters in the sketch, different patterns are generated.
the disk is cd size and fits on a 5mm stepper shaft.
thingiverse
free

MoonWalker by WillemvD
...be
simple 3d printed walking mechanisme. the frame sizes depend on the gearwheels and geared motor you have "in stock".
Almost
turbosquid
$150

almost done.c4d
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$2

Booker almost final.max
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Обои ECO, коллекция Almost white
...бесшовные. размер текстур: от 1083х1083 до 2048х1024 пикселей. ссылка на коллекцию –http://www.eco.se/ru/collection-42/
3d_export
$5

Coachtablearmchair 3D Model
...coachtablearmchair 3d model 3dexport almost free coachtablearmchair 3d model freeon 24073...
digiprops
$6

Yellow concrete parking stopper #01
...#01 digiprops yellow concrete parking stopper with two bolts. almost new, very little...
3ddd
$1

Saki Pendant-light
...a tribute to this unforgotten island, recognized by its almost extinct bamboo roots...
3d_export
$5

acoustic guitar
...cycles, when using the eevee render, the quality remains almost unchanged.the model is perfect for large renders, since the...
3d_export
$8

House
...or school work a modern style house of 12x26m almost completely finished includes plan in >(.layout) and (png)m formats...
3d_ocean
$5

Glas of Red Wine with Bottle
...wine glas a glas of red wine and an almost empty...
3d_export
$5

radiator
...detailed radiator modelled in blender. this can be used almost anywhere, however it is not a low poly model,...
Y
turbosquid
$1

Tetera y Galletas y Caf
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Смеситель Y-CON
...смеситель y-con
3ddd
смеситель , y-con
смеситель y-con
3ddd
$1

Y-Chair
...y-chair
3ddd
tom dixon
y-chair designed by tom dixon,
3ds max + obj, corona
3ddd
$1

Y Chair compilation
....net/products/us/y-chair-sled-base
y chair swivel basehttp://www.tomdixon.net/products/us/y-chair-swivel-base
turbosquid
$7

Bench Y
...turbosquid
royalty free 3d model bench y for download as obj on turbosquid: 3d models for games, architecture, videos. (1488746)
turbosquid
$15

bonePile Y
...oyalty free 3d model bonepile y for download as blend and obj on turbosquid: 3d models for games, architecture, videos. (1546374)
turbosquid
$7

Y for Yarn
...d
royalty free 3d model y for yarn model for download as max on turbosquid: 3d models for games, architecture, videos. (1699732)
turbosquid
$2

FONT Y
...quid
royalty free 3d model font y for download as ma and obj on turbosquid: 3d models for games, architecture, videos. (1549457)
3ddd
$1

WOOD-y
...wood-y
3ddd
wooden guy
turbosquid
$150

Alien Y
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Unit
turbosquid
$4

UNIT
...unit
turbosquid
royalty free 3d model unit for download as on turbosquid: 3d models for games, architecture, videos. (1196686)
archibase_planet
free

Unit
...unit
archibase planet
desk board
entertainment unit 02 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_export
$15
control unit
...control unit
3dexport
control unit
3ddd
$1

bathroom unit
...bathroom unit
3ddd
bathroom unit
3ddd
$1

Crockery unit
...crockery unit
3ddd
сервант
crockery unit
3ddd
$1

Process unit
...process unit
3ddd
статуэтка
process unit
3d_export
$5

united nations
...united nations
3dexport
united nations-logo -cnc plant
turbosquid
$3

TV unit-1 / 2 unit
...-1 / 2 unit for download as 3ds, max, obj, fbx, dwg, and dae on turbosquid: 3d models for games, architecture, videos. (1207609)
3d_export
$5

tv unit
...tv unit
3dexport
the tv unit design simple design with texture for interior
3d_ocean
$5

Tv Unit
...gh quality apple tv unit. the model is made using 3ds max. hope you enjoy it and if you have any queries feel free to contact me.
Free
design_connected
$13

Free
...free
designconnected
parri design free armchairs computer generated 3d model. designed by marco maran.
turbosquid
$5

Free
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$5

free
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free
Free
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
design_connected
free

Free barstool
...free barstool
designconnected
free 3d model of free barstool by kristalia designed by graffeo, monica.
3d_export
$5

free mixamo
...free mixamo
3dexport
free mixamo
3d_export
free

free rocks
...free rocks
3dexport
free price rock
turbosquid
free

Free Free Standing Punching Bag
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

character free
...urbosquid
free 3d model character free for download as blend on turbosquid: 3d models for games, architecture, videos. (1321193)
turbosquid
free

Royalty free
...
turbosquid
free 3d model royalty free for download as blend on turbosquid: 3d models for games, architecture, videos. (1403146)