GrabCAD

Regolith Sampler Concept
by GrabCAD
Last crawled date: 1 year, 12 months ago
Approximately 0.4 kg without motors (0.7 kg with motors).
The system is envisioned to be attached to a robotic arm.
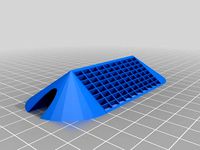
In concept, the auger should allow the system to be able to obtain rocks and regolith beneath the lunar surface (up to approximately 10 cm deep). The auger should be able to carry the regolith up to the surface. The regolith would fall off the top of the auger onto a chute. Located at the end of the chute are rods for filtering out rocks larger than 1.8 cm diameter. Anything smaller in diameter should drop into the sorter/conveyor below. Rocks that are larger than 0.8 cm diameter should land on top of the conveyor screw. Loose regolith smaller than 0.8 cm diameter should fall into the flute gaps. As the conveyor screw turns, it should push the rocks and regolith to the open end of the conveyor channel. The loose regolith should exit first out the bottom, whereas the rocks would exit at a different location, out the very end of the conveyor channel.
A second robotic arm is required to position the sample container beneath the conveyor channel to collect the rocks and regolith. The robotic arm can change the position of the container to alternate the layers of regolith and rocks.
(Detailed/refined description to be added)
The system is envisioned to be attached to a robotic arm.
In concept, the auger should allow the system to be able to obtain rocks and regolith beneath the lunar surface (up to approximately 10 cm deep). The auger should be able to carry the regolith up to the surface. The regolith would fall off the top of the auger onto a chute. Located at the end of the chute are rods for filtering out rocks larger than 1.8 cm diameter. Anything smaller in diameter should drop into the sorter/conveyor below. Rocks that are larger than 0.8 cm diameter should land on top of the conveyor screw. Loose regolith smaller than 0.8 cm diameter should fall into the flute gaps. As the conveyor screw turns, it should push the rocks and regolith to the open end of the conveyor channel. The loose regolith should exit first out the bottom, whereas the rocks would exit at a different location, out the very end of the conveyor channel.
A second robotic arm is required to position the sample container beneath the conveyor channel to collect the rocks and regolith. The robotic arm can change the position of the container to alternate the layers of regolith and rocks.
(Detailed/refined description to be added)
Similar models
grabcad
free

Conveyor 4ft
...grabcad
conveyor has a part flip, part locate, for robot unload. conveyor had gate at the end for the remnant to fall into a tub
grabcad
free

NASA Simplified Collector
...t, don't forget to click the like button. :)
check out my other model:
https://grabcad.com/library/nasa-regolith-collector-1
grabcad
free

Regolith Lunar Sampler Sorter (RLSS)
...tion to assist movement of material.
*sorted material can be viewed through a slot in the top of the feed chute prior to deposit.
grabcad
free

Regolith Scoop Filter
... power. lastly, to manage the temperature of the electronics, the system will use reflective shielding to maintain internal heat.
grabcad
free

NASA Regolith Collector
... don't forget to click the like button. :)
check out my other entry:
https://grabcad.com/library/nasa-simplified-collector-1
grabcad
free

NASA Lunar Sampler - P3D
... they are expelled through the exit aperture at the top (7 cm diameter).
refer to attached pdf document for further information.
grabcad
free

Nasa Rotating arm machine
...olith will be collect into container.my design requires only one stepper motor. my designed machine can be attach to robotic arm.
grabcad
free

T.G.S. (Torpedo "Gumball" Scoop)
...upper collection area (1-2 cm rocks) is emptied. a similar process will now be repeated for the material <1...
grabcad
free

Waste Chute
...ls or apartment kitchens. the receiving area is located beneath the chute on the ground floor or in the basement of the building.
grabcad
free

Dreveo
... is how much regolith can be moved. if the device has 10-foot diameter wheels the bucket drums can be larger than a 5-foot wheel.
Sampler
turbosquid
free

FREE 3-Gem Sampler Pack
...squid
free 3d model free 3-gem sampler pack for download as on turbosquid: 3d models for games, architecture, videos. (1397648)
3d_export
$19

perfume sampler
...; x 2.03" x 2.78"<br>- model parts: 5<br>- material count: 4<br>- xform: yes<br>- boxtrick: yes
3d_export
$19

perfume spray sampler
...; x 2.03" x 2.78"<br>- model parts: 5<br>- material count: 4<br>- xform: yes<br>- boxtrick: yes
3d_ocean
$20

E-mu Emulator II
...3docean 80's c4d e-mu emulator ii instrument keyboard musical sampler synth synthesizer systems vintage this is a replica of...
3d_export
$15

Retro Keyboard 3D Model
...model 3dexport simple casio keyboard synthesizer piano music instrument sampler recorder retro keyboard 3d model cha3ab 87925...
3d_ocean
$2

Gold Shader Maya
...material, with a nice blurry effect in addition with sampler info utility node to add some variation like fake...
3d_export
$159

v8 engine suv
...43127<br>tris: 81775<br>verts: 48964<br>- max (2016) - fbx - obj<br>v-ray 3.40.01<br>sampler adaptive dmc<br>antialiasing: mitchell-netravali<br>color mapping: linear multiply<br>global illumination:<br>primary engine -...
3d_export
$139

v8 engine suv
...41125<br>verts: 33210<br>- max (2014) - fbx - obj<br>v-ray adv 3.00.03<br>sampler adaptive dmc<br>antialiasing: mitchell-netravali<br>color mapping: linear multiply<br>global illumination:<br>primary engine -...
thingiverse
free

Filament Color Sampler by Indigo4
...filament color sampler by indigo4
thingiverse
filament color sampler
useful when choosing which color suits you the most.
unity_asset_store
free

Male Models Sampler
...from spitzsoft and speed up your game development process. find this & other characters options on the unity asset store.
Regolith
3d_sky
free

Ikea regolith
...ikea regolith
3dsky
ikea
floor lamp, curvedhttp://www.ikea.com/ru/ru/catalog/products/50103406/
thingiverse
free
Customizable struts for regolith-shielded dugout houses by drxenocide
...golith.
*edit (2014jun01) added support for model making and sheet building. because if i win, makerbot will want to print one.
thingiverse
free
HP V1910-24G Tabletop Stand by Regolith
...006a) switch on my desk and be able to organize patch cables below. foot uses the mounting locations for rack ears. requires two.
thingiverse
free
Replacement knob for Harbor Freight ladder by Regolith
...nob for the folding hinge. printed this in pla and it's held up fine. maybe abs or petg if you want it to be super bombproof.
thingiverse
free

Headrest Maglite Mount by Regolith
...10mm rods). the clip installs by twisting onto the headrest rods, and the maglite adds a rigid connection between the two mounts.
thingiverse
free

Mars complex: Regolith construction by smichel
...cal factories wii extract oxygen and chlorates from the abundant minerals to fuel the trip back and forth between earth and mars.
3d_sky
free

Ikea01
...ikea01 3dsky regolith lamp from ikea...
3d_sky
$8

IKEA / REGOLIT
...ikea / regolit 3dsky lampshade ikea regolith regolit shade diameter: 45...
thingiverse
free
Tekonsha P3 Mount (Toyota Tacoma Gen1) by Regolith
...l using an earlier revision (this version has the mounting screws moved outboard to hold the hoop a little tighter to the panel).
thingiverse
free

Mars Research Station Two by xmbrst
...habs are printed in black in the photos.) 3d-printed regolith structures -- to provide better radiation and structural protection,...
Concept
3d_export
$5

concept house
...concept house
3dexport
concept house blend.
turbosquid
$20

concept
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

concept
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Concept
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Concept
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Bo concept
...bo concept
3ddd
boconcept , декоративный набор
bo concept
3d_ocean
$45

Dreamcar concept
...cept cars from the past.before i became 3d modeler i sketched a lot futuristic cars.when i want it to look more realistic,i st...
3d_ocean
$49

Buggy Concept
... poly massive outdoor robust vehicle
just a model of are own buggy concept vehicle. maybe you can make a beautiful renders of it!
3d_export
free

concept s ii
...concept s ii
3dexport
concept car
3d_export
free

concept s iii
...concept s iii
3dexport
concept car