Thingiverse

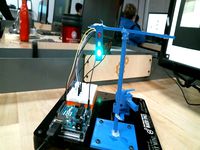
"Neurobot 3" - Arduino Educational Robotics Kit, Autonomous / RC controlled by NikolayGrigoryev
by Thingiverse
Last crawled date: 3 years ago
Hello world! :)
My name is Nick Grigoryev, I am a professional engineer, and I love to make robots!
I created this constructor kit to let children to learn the Code of Arduino, to prepare the engineers of tomorrow.
They can learn IR distance sensing, LED blinking (to blink the car lights is much more interesting, than one LED), servo control, GPS signal acquiring and processing, LCD screen, piezoelectric buzzers, inertial measurement units, etc.
This is a third version of my "Neurobot 1" (http://www.thingiverse.com/thing:1378603) with LCD screen, 3 radars and Arduino Mega, but without Raspberry Pi for easier assembly and programming.
It is a robot, which can run in autonomous mode or to be RC controlled.
It runs Arduino Mega as a "brain" and three IR sensors (distance 10-90 cm) as his "eyes".
You can run very interesting programs with "Adafruit Ultimate GPS breakout" sensor, RTC (real time clock) etc., installed on the breadboard.
To assemble it, you will need to 3D-print:
Line_11 - 3 pieces
Line_7 - 1 pieces
SwitchHolder_Line7 - 1 piece
Plate_5x11 - 1 piece
Plate_7x11 - 1 piece
Servo_holder - 4 pieces
Servo_holder_vertical - 3 pieces
Proximity_sensor_front - 3 pieces
Proximity_sensor_back - 3 pieces
Knob - 30 pieces
Line_3_13_LEDs_front - 2 pieces
Line_1_13_LEDs_90_deg - 2 pieces
LCD_Holder_front - 1 piece
LCD_Holder_back - 1 piece
Angle_1x1_135_degrees - 2 pieces
Spacer_26mm - 34 pieces
And you will need to buy:
Arduino Mega or Uno - 1 piece
Sainsmart Servo Shield for Mega or Uno - 1 piece
LiPo battery - 1 piece
LiPo checker - 1 piece (optional)
6 volts UBEC - 1 piece
Sharp IR sensor - 3 pieces
1/4 inch threaded rod - 40 inches, and cut them in pieces:
...A) 106 mm - 4 pieces
...B) 98.5 mm - 2 pieces
...C) 91 mm - 2 pieces
1/4 inch nuts - 30 pieces
6/32 bolts 1-1/4 length - 56 pieces
6/32 nuts - 56 pieces
LEDs - 26 pieces
220 Ohm resistors - 8 pieces
Servo extension cable 30 cm - 5 pieces
All the links to buy them, please see here: http://www.thingiverse.com/thing:1378603
(I want to keep one updated list of things to buy, to keep the order).
If you want, you can add RC control (I usually install Futaba Rx and Tx, but you can have it from here if you want: http://www.hobbyking.com/hobbyking/store/__190__190__Radios_Receivers.html?idCategory=190&pc=).
If you want to buy from me this kit printed (all parts except electronic components or all components at once), please write to my email below.
Have fun, I hope, you will like it :)
Nick
nikgrigoryev@gmail.com
(C) Designed in California
Program for Arduino:
// (uncomment these 3 lines of code) #include Servo.h // Includes code of "Servo library", to use the servo functions
// #include LiquidCrystal_I2C.h // Includes standard library to manage LCDs
// #include Wire.h // Includes library to manage I2C devices
Servo wheelServoFrontPassengerSide; // Creates servo objects to control four wheels servos
Servo wheelServoRearPassengerSide;
Servo wheelServoFrontDriverSide;
Servo wheelServoRearDriverSide;
Servo irServoFront; // Creates servo objects to control three IR sensors servos, front, left and right
Servo irServoRearDriver;
Servo irServoRearPassenger;
LiquidCrystal_I2C lcd(0x27, 20, 4); // Creates object "lcd" on address 0x27 for a 20 chars and 4 line display
int wheelServoFrontPassengerSidePin = 10; // Defines the pin numbers for wheels
int wheelServoRearPassengerSidePin = 9;
int wheelServoFrontDriverSidePin = 11;
int wheelServoRearDriverSidePin = 8;
int irServoFrontPin = 12; // Defines the pin numbers for servos which turn IR sensors
int irServoRearDriverPin = 6;
int irServoRearPassengerPin = 5;
int irFrontPin = A2; // Defines the pins for Sharp IR distance sensors
int irPassengerSidePin = A3; // Power supply for them is Vc = 5V, not 6V as for Hitec servos
int irDriverSidePin = A1;
int ledLightDriverSidePin = 34; // Defines the pins for front LED lights
int ledLightPassengerSidePin = 35;
void setup() {
pinMode(irFrontPin, INPUT); // Sets pins of IR distance sensors in input mode
pinMode(irPassengerSidePin, INPUT);
pinMode(irDriverSidePin, INPUT);
pinMode(ledLightDriverSidePin, OUTPUT); // Sets pins of front LED lights in output mode
pinMode(ledLightPassengerSidePin, OUTPUT);
Serial.begin(9600); // Starts Serial port at the speed 9600 baud
Wire.begin(); // Starts I2C bus
lcd.begin(); // Starts lcd object
wheelServoFrontPassengerSide.attach(wheelServoFrontPassengerSidePin); // Attaches wheels servos to four pins
wheelServoRearPassengerSide.attach(wheelServoRearPassengerSidePin);
wheelServoFrontDriverSide.attach(wheelServoFrontDriverSidePin);
wheelServoRearDriverSide.attach(wheelServoRearDriverSidePin);
irServoFront.attach(irServoFrontPin); // Attaches IR servos to three pins
irServoRearDriver.attach(irServoRearDriverPin);
irServoRearPassenger.attach(irServoRearPassengerPin);
wheelServoFrontPassengerSide.write(93); // Sends the signal to wheels servos to stop
wheelServoRearPassengerSide.write(93);
wheelServoFrontDriverSide.write(93);
wheelServoRearDriverSide.write(93);
digitalWrite(ledLightDriverSidePin, HIGH); // Turns LED lights on, sending 5V to LEDs
digitalWrite(ledLightPassengerSidePin, HIGH);
irServoFront.write(90);
irServoRearDriver.write(171);
irServoRearPassenger.write(7);
lcd.backlight(); // turns on backlight
lcd.clear(); // clears LCD
lcd.setCursor(7, 1); // takes cursor to position 8 of line 2
lcd.print("Hello!");
lcd.setCursor(3, 2);
lcd.print("Hulk is alive :)");
}
void changeSpeedOfWheels(float a1, float a2, float b1, float b2, int stepTime, int cycleTime)
{
a1 = -a1;
a2 = -a2;
b1 = -b1;
b2 = -b2;
float an = a1;
float bn = b1;
int n = (int) (cycleTime / stepTime + 0.5);
for (int i = 1; i <= n; i++)
{
int i_want_movement_right = (int) (an + 0.5); // this is real movement, range from -70 to +70
int i_want_movement_left = (int) (bn + 0.5); // this is real movement, range from -70 to +70
int pos_Right = -i_want_movement_right + 90; // 60 full backward 120 full forward 90 stop
int pos_Left = i_want_movement_left + 90; // 120 full backward 60 full forward 90 stop
wheelServoFrontPassengerSide.write(pos_Right + 3);
wheelServoRearPassengerSide.write(pos_Right + 3);
wheelServoFrontDriverSide.write(pos_Left + 3);
wheelServoRearDriverSide.write(pos_Left + 3);
an = (a2 - a1) / n + an;
bn = (b2 - b1) / n + bn;
delay(stepTime);
}
int i_want_movement_right = a2; // this is real movement, range from -70 to +70
int i_want_movement_left = b2; // this is real movement, range from -70 to +70
int pos_Right = -i_want_movement_right + 90; // 60 full backward 120 full forward 90 stop
int pos_Left = i_want_movement_left + 90; // 120 full backward 60 full forward 90 stop
wheelServoFrontPassengerSide.write(pos_Right + 3);
wheelServoRearPassengerSide.write(pos_Right + 3);
wheelServoFrontDriverSide.write(pos_Left + 3);
wheelServoRearDriverSide.write(pos_Left + 3);
}
void loop() {
delay(1000);
int irFrontMassive[156]; // Declares 3 massives for front, driver side
int irDriverMassive[159]; // and passenger side semicircles
int irPassengerMassive[160];
for (int i = 0; i <= 160; i++) { // Initialize three massives with zeros
irFrontMassive[i] = 0;
irDriverMassive[i] = 0;
irPassengerMassive[i] = 0;
}
int maxVectorFrontLength = 2000; // Starts the vector value with closest max
int maxVectorFrontAngle = 0; // Starts the vector angle with zero
irServoFront.write(11);
delay(500);
for (int i = 11; i <= 167; i++) { // Fills up the front distance massive with data from front IR sensor
irServoFront.write(i);
delay (10);
irFrontMassive[i] = analogRead(irFrontPin);
if (maxVectorFrontLength > irFrontMassive[i]) {
maxVectorFrontLength = irFrontMassive[i];
maxVectorFrontAngle = i;
}
}
irServoFront.write(90);
int maxVectorDriverLength = 2000; // Starts the vector value with closest max
int maxVectorDriverAngle = 0; // Starts the vector angle with zero
irServoRearDriver.write(12);
delay(500);
for (int i = 12; i <= 171; i++) { // Fills up the driver side distance massive with data from driver IR sensor
irServoRearDriver.write(i);
delay (10);
irDriverMassive[i] = analogRead(irDriverSidePin);
if (maxVectorDriverLength > irDriverMassive[i]) { maxVectorDriverLength = irDriverMassive[i]; maxVectorDriverAngle = i; }
}
irServoRearDriver.write(91);
int maxVectorPassengerLength = 2000; // Starts the vector value with closest max
int maxVectorPassengerAngle = 0; // Starts the vector angle with zero
irServoRearPassenger.write(7);
delay(500);
for (int i = 7; i <= 167; i++) { // Fills up the passenger distance massive with data from passenger IR sensor
irServoRearPassenger.write(i);
delay (10);
irPassengerMassive[i] = analogRead(irPassengerSidePin);
if (maxVectorPassengerLength > irPassengerMassive[i]) { maxVectorPassengerLength = irPassengerMassive[i]; maxVectorPassengerAngle = i; }
}
irServoRearPassenger.write(88);
lcd.clear(); // Clears LCD
lcd.setCursor(0, 0); // Takes cursor to position 1 of line 1
lcd.print("Front A=");
lcd.print(maxVectorFrontAngle);
lcd.setCursor(12, 0);
lcd.print("L=");
lcd.print(maxVectorFrontLength);
lcd.setCursor(0, 1); // Takes cursor to position 1 of line 2
lcd.print("Left A=");
lcd.print(maxVectorDriverAngle);
lcd.setCursor(12, 1);
lcd.print("L=");
lcd.print(maxVectorDriverLength);
lcd.setCursor(0, 2); // Takes cursor to position 1 of line 3
lcd.print("Right A=");
lcd.print(maxVectorPassengerAngle);
lcd.setCursor(12, 2);
lcd.print("L=");
lcd.print(maxVectorPassengerLength);
// XXXXXXXXXXXXXX Now we need to choose the maximum vector by length out of three
int maxVectorLength = maxVectorDriverLength; // Checks which vector is longer
if (maxVectorLength > maxVectorFrontLength) { maxVectorLength = maxVectorFrontLength; }
if (maxVectorLength > maxVectorPassengerLength) { maxVectorLength = maxVectorPassengerLength; }
int maxVectorAngle = maxVectorDriverAngle - 180; // -180 ... +180
if (maxVectorLength == maxVectorFrontLength) { maxVectorAngle = maxVectorFrontAngle - 90; }
if (maxVectorLength == maxVectorPassengerLength) { maxVectorAngle = maxVectorPassengerAngle; }
// XXXXXXXXXXXXX Now we need to turn the car to the angle and go length of the choosen vector
int timeToTurn = map(maxVectorAngle, -180, 180, -2200, 2200);
int lengthToGo = map(maxVectorLength, 160, 30, 100, 1500);
lcd.setCursor(0, 3); // Takes cursor to position 1 of line 3
lcd.print("Angle=");
lcd.print(maxVectorAngle);
lcd.setCursor(11, 3);
lcd.print("Dist=");
lcd.print(lengthToGo);
if (timeToTurn > 0) {
changeSpeedOfWheels(-35, -35, 35, 35, 20, timeToTurn);
changeSpeedOfWheels(-35, 0, 35, 0, 20, timeToTurn/3);
changeSpeedOfWheels(0, 35, 0, 35, 20, lengthToGo/6);
changeSpeedOfWheels(35, 35, 35, 35, 20, lengthToGo);
changeSpeedOfWheels(35, 0, 35, 0, 20, lengthToGo/6);
}
if (timeToTurn < 0) {
changeSpeedOfWheels(35, 35, -35, -35, 20, -timeToTurn);
changeSpeedOfWheels(35, 0, -35, 0, 20, -timeToTurn/3);
changeSpeedOfWheels(0, 35, 0, 35, 20, lengthToGo/6);
changeSpeedOfWheels(35, 35, 35, 35, 20, lengthToGo);
changeSpeedOfWheels(35, 0, 35, 0, 20, lengthToGo/6);
}
delay(300);
}
My name is Nick Grigoryev, I am a professional engineer, and I love to make robots!
I created this constructor kit to let children to learn the Code of Arduino, to prepare the engineers of tomorrow.
They can learn IR distance sensing, LED blinking (to blink the car lights is much more interesting, than one LED), servo control, GPS signal acquiring and processing, LCD screen, piezoelectric buzzers, inertial measurement units, etc.
This is a third version of my "Neurobot 1" (http://www.thingiverse.com/thing:1378603) with LCD screen, 3 radars and Arduino Mega, but without Raspberry Pi for easier assembly and programming.
It is a robot, which can run in autonomous mode or to be RC controlled.
It runs Arduino Mega as a "brain" and three IR sensors (distance 10-90 cm) as his "eyes".
You can run very interesting programs with "Adafruit Ultimate GPS breakout" sensor, RTC (real time clock) etc., installed on the breadboard.
To assemble it, you will need to 3D-print:
Line_11 - 3 pieces
Line_7 - 1 pieces
SwitchHolder_Line7 - 1 piece
Plate_5x11 - 1 piece
Plate_7x11 - 1 piece
Servo_holder - 4 pieces
Servo_holder_vertical - 3 pieces
Proximity_sensor_front - 3 pieces
Proximity_sensor_back - 3 pieces
Knob - 30 pieces
Line_3_13_LEDs_front - 2 pieces
Line_1_13_LEDs_90_deg - 2 pieces
LCD_Holder_front - 1 piece
LCD_Holder_back - 1 piece
Angle_1x1_135_degrees - 2 pieces
Spacer_26mm - 34 pieces
And you will need to buy:
Arduino Mega or Uno - 1 piece
Sainsmart Servo Shield for Mega or Uno - 1 piece
LiPo battery - 1 piece
LiPo checker - 1 piece (optional)
6 volts UBEC - 1 piece
Sharp IR sensor - 3 pieces
1/4 inch threaded rod - 40 inches, and cut them in pieces:
...A) 106 mm - 4 pieces
...B) 98.5 mm - 2 pieces
...C) 91 mm - 2 pieces
1/4 inch nuts - 30 pieces
6/32 bolts 1-1/4 length - 56 pieces
6/32 nuts - 56 pieces
LEDs - 26 pieces
220 Ohm resistors - 8 pieces
Servo extension cable 30 cm - 5 pieces
All the links to buy them, please see here: http://www.thingiverse.com/thing:1378603
(I want to keep one updated list of things to buy, to keep the order).
If you want, you can add RC control (I usually install Futaba Rx and Tx, but you can have it from here if you want: http://www.hobbyking.com/hobbyking/store/__190__190__Radios_Receivers.html?idCategory=190&pc=).
If you want to buy from me this kit printed (all parts except electronic components or all components at once), please write to my email below.
Have fun, I hope, you will like it :)
Nick
nikgrigoryev@gmail.com
(C) Designed in California
Program for Arduino:
// (uncomment these 3 lines of code) #include Servo.h // Includes code of "Servo library", to use the servo functions
// #include LiquidCrystal_I2C.h // Includes standard library to manage LCDs
// #include Wire.h // Includes library to manage I2C devices
Servo wheelServoFrontPassengerSide; // Creates servo objects to control four wheels servos
Servo wheelServoRearPassengerSide;
Servo wheelServoFrontDriverSide;
Servo wheelServoRearDriverSide;
Servo irServoFront; // Creates servo objects to control three IR sensors servos, front, left and right
Servo irServoRearDriver;
Servo irServoRearPassenger;
LiquidCrystal_I2C lcd(0x27, 20, 4); // Creates object "lcd" on address 0x27 for a 20 chars and 4 line display
int wheelServoFrontPassengerSidePin = 10; // Defines the pin numbers for wheels
int wheelServoRearPassengerSidePin = 9;
int wheelServoFrontDriverSidePin = 11;
int wheelServoRearDriverSidePin = 8;
int irServoFrontPin = 12; // Defines the pin numbers for servos which turn IR sensors
int irServoRearDriverPin = 6;
int irServoRearPassengerPin = 5;
int irFrontPin = A2; // Defines the pins for Sharp IR distance sensors
int irPassengerSidePin = A3; // Power supply for them is Vc = 5V, not 6V as for Hitec servos
int irDriverSidePin = A1;
int ledLightDriverSidePin = 34; // Defines the pins for front LED lights
int ledLightPassengerSidePin = 35;
void setup() {
pinMode(irFrontPin, INPUT); // Sets pins of IR distance sensors in input mode
pinMode(irPassengerSidePin, INPUT);
pinMode(irDriverSidePin, INPUT);
pinMode(ledLightDriverSidePin, OUTPUT); // Sets pins of front LED lights in output mode
pinMode(ledLightPassengerSidePin, OUTPUT);
Serial.begin(9600); // Starts Serial port at the speed 9600 baud
Wire.begin(); // Starts I2C bus
lcd.begin(); // Starts lcd object
wheelServoFrontPassengerSide.attach(wheelServoFrontPassengerSidePin); // Attaches wheels servos to four pins
wheelServoRearPassengerSide.attach(wheelServoRearPassengerSidePin);
wheelServoFrontDriverSide.attach(wheelServoFrontDriverSidePin);
wheelServoRearDriverSide.attach(wheelServoRearDriverSidePin);
irServoFront.attach(irServoFrontPin); // Attaches IR servos to three pins
irServoRearDriver.attach(irServoRearDriverPin);
irServoRearPassenger.attach(irServoRearPassengerPin);
wheelServoFrontPassengerSide.write(93); // Sends the signal to wheels servos to stop
wheelServoRearPassengerSide.write(93);
wheelServoFrontDriverSide.write(93);
wheelServoRearDriverSide.write(93);
digitalWrite(ledLightDriverSidePin, HIGH); // Turns LED lights on, sending 5V to LEDs
digitalWrite(ledLightPassengerSidePin, HIGH);
irServoFront.write(90);
irServoRearDriver.write(171);
irServoRearPassenger.write(7);
lcd.backlight(); // turns on backlight
lcd.clear(); // clears LCD
lcd.setCursor(7, 1); // takes cursor to position 8 of line 2
lcd.print("Hello!");
lcd.setCursor(3, 2);
lcd.print("Hulk is alive :)");
}
void changeSpeedOfWheels(float a1, float a2, float b1, float b2, int stepTime, int cycleTime)
{
a1 = -a1;
a2 = -a2;
b1 = -b1;
b2 = -b2;
float an = a1;
float bn = b1;
int n = (int) (cycleTime / stepTime + 0.5);
for (int i = 1; i <= n; i++)
{
int i_want_movement_right = (int) (an + 0.5); // this is real movement, range from -70 to +70
int i_want_movement_left = (int) (bn + 0.5); // this is real movement, range from -70 to +70
int pos_Right = -i_want_movement_right + 90; // 60 full backward 120 full forward 90 stop
int pos_Left = i_want_movement_left + 90; // 120 full backward 60 full forward 90 stop
wheelServoFrontPassengerSide.write(pos_Right + 3);
wheelServoRearPassengerSide.write(pos_Right + 3);
wheelServoFrontDriverSide.write(pos_Left + 3);
wheelServoRearDriverSide.write(pos_Left + 3);
an = (a2 - a1) / n + an;
bn = (b2 - b1) / n + bn;
delay(stepTime);
}
int i_want_movement_right = a2; // this is real movement, range from -70 to +70
int i_want_movement_left = b2; // this is real movement, range from -70 to +70
int pos_Right = -i_want_movement_right + 90; // 60 full backward 120 full forward 90 stop
int pos_Left = i_want_movement_left + 90; // 120 full backward 60 full forward 90 stop
wheelServoFrontPassengerSide.write(pos_Right + 3);
wheelServoRearPassengerSide.write(pos_Right + 3);
wheelServoFrontDriverSide.write(pos_Left + 3);
wheelServoRearDriverSide.write(pos_Left + 3);
}
void loop() {
delay(1000);
int irFrontMassive[156]; // Declares 3 massives for front, driver side
int irDriverMassive[159]; // and passenger side semicircles
int irPassengerMassive[160];
for (int i = 0; i <= 160; i++) { // Initialize three massives with zeros
irFrontMassive[i] = 0;
irDriverMassive[i] = 0;
irPassengerMassive[i] = 0;
}
int maxVectorFrontLength = 2000; // Starts the vector value with closest max
int maxVectorFrontAngle = 0; // Starts the vector angle with zero
irServoFront.write(11);
delay(500);
for (int i = 11; i <= 167; i++) { // Fills up the front distance massive with data from front IR sensor
irServoFront.write(i);
delay (10);
irFrontMassive[i] = analogRead(irFrontPin);
if (maxVectorFrontLength > irFrontMassive[i]) {
maxVectorFrontLength = irFrontMassive[i];
maxVectorFrontAngle = i;
}
}
irServoFront.write(90);
int maxVectorDriverLength = 2000; // Starts the vector value with closest max
int maxVectorDriverAngle = 0; // Starts the vector angle with zero
irServoRearDriver.write(12);
delay(500);
for (int i = 12; i <= 171; i++) { // Fills up the driver side distance massive with data from driver IR sensor
irServoRearDriver.write(i);
delay (10);
irDriverMassive[i] = analogRead(irDriverSidePin);
if (maxVectorDriverLength > irDriverMassive[i]) { maxVectorDriverLength = irDriverMassive[i]; maxVectorDriverAngle = i; }
}
irServoRearDriver.write(91);
int maxVectorPassengerLength = 2000; // Starts the vector value with closest max
int maxVectorPassengerAngle = 0; // Starts the vector angle with zero
irServoRearPassenger.write(7);
delay(500);
for (int i = 7; i <= 167; i++) { // Fills up the passenger distance massive with data from passenger IR sensor
irServoRearPassenger.write(i);
delay (10);
irPassengerMassive[i] = analogRead(irPassengerSidePin);
if (maxVectorPassengerLength > irPassengerMassive[i]) { maxVectorPassengerLength = irPassengerMassive[i]; maxVectorPassengerAngle = i; }
}
irServoRearPassenger.write(88);
lcd.clear(); // Clears LCD
lcd.setCursor(0, 0); // Takes cursor to position 1 of line 1
lcd.print("Front A=");
lcd.print(maxVectorFrontAngle);
lcd.setCursor(12, 0);
lcd.print("L=");
lcd.print(maxVectorFrontLength);
lcd.setCursor(0, 1); // Takes cursor to position 1 of line 2
lcd.print("Left A=");
lcd.print(maxVectorDriverAngle);
lcd.setCursor(12, 1);
lcd.print("L=");
lcd.print(maxVectorDriverLength);
lcd.setCursor(0, 2); // Takes cursor to position 1 of line 3
lcd.print("Right A=");
lcd.print(maxVectorPassengerAngle);
lcd.setCursor(12, 2);
lcd.print("L=");
lcd.print(maxVectorPassengerLength);
// XXXXXXXXXXXXXX Now we need to choose the maximum vector by length out of three
int maxVectorLength = maxVectorDriverLength; // Checks which vector is longer
if (maxVectorLength > maxVectorFrontLength) { maxVectorLength = maxVectorFrontLength; }
if (maxVectorLength > maxVectorPassengerLength) { maxVectorLength = maxVectorPassengerLength; }
int maxVectorAngle = maxVectorDriverAngle - 180; // -180 ... +180
if (maxVectorLength == maxVectorFrontLength) { maxVectorAngle = maxVectorFrontAngle - 90; }
if (maxVectorLength == maxVectorPassengerLength) { maxVectorAngle = maxVectorPassengerAngle; }
// XXXXXXXXXXXXX Now we need to turn the car to the angle and go length of the choosen vector
int timeToTurn = map(maxVectorAngle, -180, 180, -2200, 2200);
int lengthToGo = map(maxVectorLength, 160, 30, 100, 1500);
lcd.setCursor(0, 3); // Takes cursor to position 1 of line 3
lcd.print("Angle=");
lcd.print(maxVectorAngle);
lcd.setCursor(11, 3);
lcd.print("Dist=");
lcd.print(lengthToGo);
if (timeToTurn > 0) {
changeSpeedOfWheels(-35, -35, 35, 35, 20, timeToTurn);
changeSpeedOfWheels(-35, 0, 35, 0, 20, timeToTurn/3);
changeSpeedOfWheels(0, 35, 0, 35, 20, lengthToGo/6);
changeSpeedOfWheels(35, 35, 35, 35, 20, lengthToGo);
changeSpeedOfWheels(35, 0, 35, 0, 20, lengthToGo/6);
}
if (timeToTurn < 0) {
changeSpeedOfWheels(35, 35, -35, -35, 20, -timeToTurn);
changeSpeedOfWheels(35, 0, -35, 0, 20, -timeToTurn/3);
changeSpeedOfWheels(0, 35, 0, 35, 20, lengthToGo/6);
changeSpeedOfWheels(35, 35, 35, 35, 20, lengthToGo);
changeSpeedOfWheels(35, 0, 35, 0, 20, lengthToGo/6);
}
delay(300);
}
Similar models
thingiverse
free

Touchless WC Flush Unit ultrasound IFÖ IFO toilett button conversion replacement servo by spaceengineer
...); //servo position 90 degree
delay(2000);
myservo.write(180); //servo position 180 degree
delay(1000);
myservo.detach();
}
}
thingiverse
free

Motion sensing night light by SteveOst
...talwrite(led1,low);
digitalwrite(led2,low);
}
serial.println("motion");
serial.print(motionvalue);
}
else
{
delay(300);
thingiverse
free

Arduino Robot Avoid Obstacles by Paolo_Buono
...);
delay(4000);
case 4:
serial.println("left 4sec");
servoleft.write(60);
servoright.write(90);
delay(4000);
break;
}
}
grabcad
free

Automatic Slide Gate Maket
...lwrite (dcl,low);
}
if(limitkanan==1 && hasilkiri==1){
digitalwrite (dcr,low);
digitalwrite (dcl,high);
}
}
thingiverse
free

spinner led pov by fatero
...har* s)
{
for (int i = 0; i<=strlen(s); i++)
{
displaychar(s[i]);
}
}
void loop()
{
displaystring(" hola mundo ");
}
thingiverse
free

Wheel of Fortune by WillemvD
...yservo.write(pos); delay(15); }
delay(2000);
for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); }
}
}
thingiverse
free

ARMDUINO V1 Open-Source Robotic Arm! by Doctorfizzle
...urnval);
analogwrite(led1, turnval / 8 - 120);
analogwrite(led2, firstval / 8 - 120);
analogwrite(led3, secondval / 8 - 120);
}
thingiverse
free

LikeYouPartyPin by WillemvD
..., low); delay(200);digitalwrite(eye, high);delay(200);
digitalwrite(mouthlow, low); digitalwrite(mouthhigh, low); delay(500); }}}
thingiverse
free
3DX TRAFFIC LIGHT
...digitalwrite(ledg, low);
digitalwrite(ledy, high);
delay(3000);
digitalwrite(ledr, high);
digitalwrite(ledy, low);
delay(1000);
}
thingiverse
free

Cat feeder with Tropicana bottle hopper by TheLoupen
...;
cycle();
vibrate(3);
cycle();
vibrate(3);
//delay(20000);
k++;
}
//digitalwrite(led13, low);
write(0,0,0,0);
delay(10752000);
}
Nikolaygrigoryev
thingiverse
free

"Neurobot 2" - Arduino Educational Robotics Kit, Autonomous / RC controlled by NikolayGrigoryev
...ts), please write to my email below.
have fun, i hope, you will like it :)
nick
nikgrigoryev@gmail.com
(c) designed in california
thingiverse
free

"Neurobot 1" - Arduino, Raspberry Pi, Linux and ROS educational robotics kit by NikolayGrigoryev
...ceyw2utyojym5fsdqfbhq
"gentle introduction to ros" by jason m. o’kane:https://cse.sc.edu/~jokane/agitr/agitr-letter.pdf
Neurobot
thingiverse
free

Metric Neurobot by Alejandro3d
...sensors are added
this bot was controlled by raspberry pi 3 with arduino uno onboard, a motor driver was used to drive the robot.
thingiverse
free
"Neurobot 2" - Arduino Educational Robotics Kit, Autonomous / RC controlled by NikolayGrigoryev
...ts), please write to my email below.
have fun, i hope, you will like it :)
nick
nikgrigoryev@gmail.com
(c) designed in california
thingiverse
free

Raspberry Pi camera servo gimbal by Alejandro3d
...is developed to put raspberry pi camera onto the neurobot robot. it is a servo gimbal. it is a...
thingiverse
free
"Neurobot 1" - Arduino, Raspberry Pi, Linux and ROS educational robotics kit by NikolayGrigoryev
...ceyw2utyojym5fsdqfbhq
"gentle introduction to ros" by jason m. o’kane:https://cse.sc.edu/~jokane/agitr/agitr-letter.pdf
Autonomous
turbosquid
$15

concept autonomous bus
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$300

Unmanned Autonomous Land Vehicle
...l unmanned autonomous land vehicle for download as and sldas on turbosquid: 3d models for games, architecture, videos. (1437737)
turbosquid
$5

Old autonomous stationary washbasin
...model old autonomous stationary washbasin for download as max on turbosquid: 3d models for games, architecture, videos. (1393474)
3d_export
$25

autonomous robotic car
...r>moreover in this design used some special components such as 3d camera and rplidar sensor to make this robot more qualified.
turbosquid
$100

Autonomous automatic wind-heat the central_SolidWorks
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

autonomous mechanism
...>verts: 40158<br>renderer: scanline<br>no 3rd party plugins<br>uvmapping: mixed<br>units: centimeters.
3d_export
$50

The of the American multi-purpose underwater autonomous drone Snakehead
...e drone uses lithium-ion<br>batteries with a very high charge density and electric motors.<br>all peace and goodness.
3d_export
$5

AIDANN 3D Model
...aidann 3d model 3dexport aidann robot autonomous dog fox wolf machine technology aidann 3d model evangel...
3d_export
$7

fallen titan
...passability but low maneuverability, with good armor, and long autonomous work...
3d_export
$69

Drone 3D Model
...air vehicle rotorcraft unmanned aerial remote contolled propeller weapon autonomousy unpiloted ship airship plane airplane drone 3d model cosminkn...
Arduino
turbosquid
$7

Arduino
...turbosquid
royalty free 3d model arduino for download as max on turbosquid: 3d models for games, architecture, videos. (1197165)
turbosquid
$3
Arduino
...turbosquid
royalty free 3d model arduino for download as c4d on turbosquid: 3d models for games, architecture, videos. (1305484)
3d_export
$5
arduino satellite
...rt
this model is the exact arduino based satellite model with some basic sensors and camera modules and also includes batteries.
turbosquid
$1

Arduino UNO
...alty free 3d model arduino uno for download as , stl, and wrl on turbosquid: 3d models for games, architecture, videos. (1515932)
3d_export
$5

esp8266 box arduino
...esp8266 box arduino
3dexport
box for esp8266 module with wire hole. inside dimensions: 49x26 mm. height 15 mm.
3d_export
$60

Arduino Uno Rev3 Microcontroller 3D Model
...mega328p circuit board spark cable wire 5v 74v 9v 111v
arduino uno rev3 microcontroller 3d model danielgarnier4403 97237 3dexport
3d_export
free

arduino rover kit
...no!!! materials: no!!! rigged: no animated: no uv mapped: no it is not an exact copy of the original! not subject to 3d printing!
3d_ocean
$7

The housing for the 3d Printer
...the housing for the 3d printer 3docean arduino device housing stl the housing consists of two portions:...
3d_export
$5

arm 4 axis
...uno -4 servo motor 180° -3 joystick (x,y) for arduino -mdf wood -some wires -cnc laser cut...
3d_export
$5
solar tracker
...machine for the frame . list of material : -arduino uno -2 step motor with driver -4 ldr sensor...
Educational
turbosquid
$19

Educational Cubes
...el educational cubes for download as blend, stl, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1710777)
turbosquid
$59

education centre
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$49

Educational Toy
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10

educational robot
... educational robot for download as ma, 3ds, obj, c4d, and fbx on turbosquid: 3d models for games, architecture, videos. (1335566)
3d_export
$25

The Educator 3D Model
...the educator 3d model
3dexport
exterior official
the educator 3d model inams 23486 3dexport
turbosquid
$15

conference and education table
...e 3d model conference and education table for download as obj on turbosquid: 3d models for games, architecture, videos. (1371673)
turbosquid
$39

Online Classroom Education Covid-19 Lockdown Distance Education Learning
...nce education learning for download as max, c4d, 3ds, and fbx on turbosquid: 3d models for games, architecture, videos. (1647923)
turbosquid
$15

Closet Educational resources
...ational resources for download as c4d, 3ds, dxf, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1589840)
3d_export
$10

Pumping station educational model for students
...pumping station educational model for students
3dexport
pumping station educational model for students
3d_export
$15

education magnet set
...e up render. - all parts and materials are logically named. other formats ================= - collada (.dae) - autodesk fbx - obj
Rc
3ddd
$1

RC Helicopter
...rc helicopter
3ddd
вертолет
mini rc helicopter
93.329 polys
3d_export
$7

rc helicopter model
...rc helicopter model
3dexport
rc helicopter model
3d_ocean
$25

RC F1
...rc f1
3docean
auto car control f1 formula race rc remote speed
remote control f1 car
turbosquid
$10
rc plane
...lane
turbosquid
free 3d model rc plane for download as blend on turbosquid: 3d models for games, architecture, videos. (1295828)
turbosquid
$100

RC Helicopter
...free 3d model rc helicopter for download as 3ds, max, and obj on turbosquid: 3d models for games, architecture, videos. (1298511)
turbosquid
$59

Drone with RC
...3d model drone with rc for download as 3ds, max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1363601)
turbosquid
$75

RC buggy
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$39

RC Plane001
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$30

RC Jet
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$30

Rc airplane
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Kit
turbosquid
$3

Bathroom Kit Baño kit
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$19

Kit
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$20

Drift Kit
...drift kit
3dexport
turbosquid
$40

BitCoin Kit
...urbosquid
royalty free 3d model bitcoin kit for download as on turbosquid: 3d models for games, architecture, videos. (1519068)
turbosquid
$9

Industrial kit
...osquid
royalty free 3d model industrial kit for download as on turbosquid: 3d models for games, architecture, videos. (1144117)
turbosquid
$6

Kit Vases
...
turbosquid
royalty free 3d model kit vases for download as on turbosquid: 3d models for games, architecture, videos. (1285114)
turbosquid
free

Survival Kit
...rbosquid
royalty free 3d model survival kit for download as on turbosquid: 3d models for games, architecture, videos. (1637721)
turbosquid
$50

Ninja Kit
...rbosquid
royalty free 3d model ninja kit for download as fbx on turbosquid: 3d models for games, architecture, videos. (1672364)
turbosquid
$35

Brushes Kit
...osquid
royalty free 3d model brushes kit for download as max on turbosquid: 3d models for games, architecture, videos. (1216721)
turbosquid
$19

Medical kit
...osquid
royalty free 3d model medical kit for download as fbx on turbosquid: 3d models for games, architecture, videos. (1486089)
Robotics
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Controlled
3d_ocean
$4
Controller TQFP32
...qfp32
3docean
chip controller cpu electronic gpu mcu micro controller silicon smd tqfp wafer
a micro controller in tqfp32 package
3d_ocean
$4

Controller TQFP44
...44
3docean
chip controller cpu electronic gpu mcu micro controller package smd tqfp tqfp44
a micro controller in a tqfp44 package
3d_export
$15
control unit
...control unit
3dexport
control unit
3ddd
$1

Yacht control
...yacht control
3ddd
yacht control
3d_export
$5

controle pgdm
...controle pgdm
3dexport
carcaca controle pgdm
turbosquid
free

controler
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Control
...
http://www.schmitz-leuchten.de/html-ru/einzelleuchten-lampentyp-details.php?lamptype_no=700&group;=917&id;=731
3d_ocean
$4

Controller TQFP100
...100
3docean
chip computer cpu electronic gpu mcu micro controller pin platine silicon wafer
a micro controller in tqfp100 package
3d_ocean
$4
Controller TQFP64
...qfp64
3docean
chip computer cpu gpu mcu micro controller package silicon tqfp tqfp64 wafer
a micro controller in a tqfp64 package
3d_ocean
$7

Remote controller
... control switcher tv remote
remote controller for tv, sound systems etc easy to edit textures photo real rendered with mental ray
3
turbosquid
$10

Mountain Bike 3 -3 of 3
...model mountain bike 3 (#3 of 3) for download as fbx and blend on turbosquid: 3d models for games, architecture, videos. (1438752)
turbosquid
$6

Rock 3-3
...urbosquid
royalty free 3d model rock 3-3 for download as obj on turbosquid: 3d models for games, architecture, videos. (1628065)
turbosquid
$29
Books 150 pieces 3-3-3
...books 150 pieces 3-3-3 for download as max, obj, fbx, and stl on turbosquid: 3d models for games, architecture, videos. (1384033)
turbosquid
$3
Genesis 3 Clothing 3
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5

hinge 3
...hinge 3
3dexport
hinge 3
3ddd
$1

Розетка 3
...розетка 3
3ddd
розетка
розетка 3
turbosquid
$50

is-3
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10

Mountain Bike 3 -2 of 3
...model mountain bike 3 (#2 of 3) for download as fbx and blend on turbosquid: 3d models for games, architecture, videos. (1438750)
turbosquid
$10

Mountain Bike 1 -3 of 3
...model mountain bike 1 (#3 of 3) for download as fbx and blend on turbosquid: 3d models for games, architecture, videos. (1438743)
3d_export
$5

3 CATS
...3 cats
3dexport
3 cats pen holder