Thingiverse
MarginallyClever/UBC modular robot arm prototype by i-make-robots
by Thingiverse
Last crawled date: 3 years ago
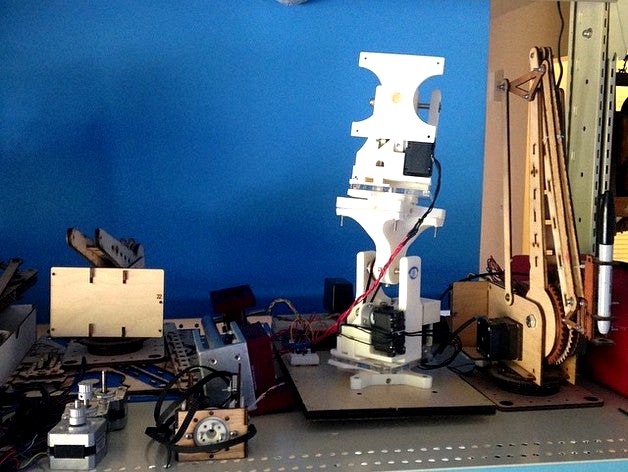
Marginally Clever commissioned a robot arm prototype from UBC mechanical engineering students Liam Hodgson, Lucas Porto, and Oliver Wolfond for ENPH 459 in the winter of 2014/2015. Their design is modular - three repeating sections that can be put together to make a 6DOF arm with 50cm reach, 1kg mass at the wrist, and 1mm repeatability. This design meets all those requirements.
In total this project cost a little over $500 CAD and the final complete arm would have been somewhere around $1000. The custom parts are 3D printable, the rest is available for purchase from sources like McMaster-Carr.
The controller is a BeagleBone Black with sparkfun level converters. All three stages are identical. The picture shows the wrist and elbow stage. The shoulder stage would need Dynamixel servos of the same size that are three times the price. get the BBB source code
Due to the limitations of the servos, the range of motion in each joint is approximately 30 degrees. Marginally Clever feels this is not usable for practical applications as is. Rather than let it go to waste, Marginally Clever is releasing the plans on the internet for anyone to remix. Perhaps you can learn something from our prototype. Maybe you can improve on the Solidworks files (zipped) and make a better machine. If you can widen the range of motion while keeping the position feedback AND the price under $1000, call us: We have opportunities waiting for you.
Marginally Clever is committed to building a low cost arm and making it available to everyone. Follow us online, say 'Hi!' at a Maker Faire, and tell your friends. Together we will do amazing things.
In total this project cost a little over $500 CAD and the final complete arm would have been somewhere around $1000. The custom parts are 3D printable, the rest is available for purchase from sources like McMaster-Carr.
The controller is a BeagleBone Black with sparkfun level converters. All three stages are identical. The picture shows the wrist and elbow stage. The shoulder stage would need Dynamixel servos of the same size that are three times the price. get the BBB source code
Due to the limitations of the servos, the range of motion in each joint is approximately 30 degrees. Marginally Clever feels this is not usable for practical applications as is. Rather than let it go to waste, Marginally Clever is releasing the plans on the internet for anyone to remix. Perhaps you can learn something from our prototype. Maybe you can improve on the Solidworks files (zipped) and make a better machine. If you can widen the range of motion while keeping the position feedback AND the price under $1000, call us: We have opportunities waiting for you.
Marginally Clever is committed to building a low cost arm and making it available to everyone. Follow us online, say 'Hi!' at a Maker Faire, and tell your friends. Together we will do amazing things.
Similar models
thingiverse
free

Delta Robot v2 with three arms by i-make-robots
... you'd like to design your own delta robot, try this delta robot calculator. handy for making your own rostock, kossel, etc.
grabcad
free

Prototype of Passive Robot For Wrist Rehabilitation
...-the-art 3d printing technologies, showcasing our commitment to precision and innovation in the field of rehabilitation robotics.
thingiverse
free

TR Robotic Arm
...also wrote an open source python api that can be used with this project: https://github.com/teddyrobotics/commerson-driver
enjoy!
grabcad
free

Robotic Arm
...robotic arm
grabcad
small robotic arm using three 9g servos and one mg995 servo.
thingiverse
free

Servo Arm Extensions - 3 Types by gvalleyshop
... on etsy for a very reasonable price. check us out here: https://www.etsy.com/ca/listing/470828904/set-of-10-assorted-servo-arms
grabcad
free

Robot Arm
...resembles the human arm motion. it is a 6-axis robot arm. servo motors are placed on each joint it controlled the various motion.
grabcad
free

Robot arm 6 axes prototype
...ces in the folder and also a simulation video, and the photo of the real prototype too. feel free to dm me if you need something.
grabcad
free

Servo Motor MG996R
... robotic arm. the gears inside are metal and therefore we can achieve better precision and repeatability than with plastic gears.
grabcad
free

Rotating robot arm component
...rotating robot arm component
grabcad
it is possible to drive motion with a servo motor
thingiverse
free

Modular Robot Rotational Module (ZaMoBot ) by czarama
... up to 6 servos.
tags: robot, robotic, robotics, manipulator, control, cool robot, robotic arm, educational robot, carlos zarama
Marginallyclever
thingiverse
free

Vertical Plotter by owenlab
...the firmware and software you can use the awesome makelangelohttps://github.com/marginallyclevermakelangelo ...
thingiverse
free

Polar graph by V3rtex
...and keeps it alive also. !!!important!!! legal notice for marginallyclever company. for demonstration purposes in a 3d printer store...
thingiverse
free

timing belt measurement machine by i-make-robots
...if you like this please tell your friends about http://marginallyclevercom ...
Ubc
3dfindit
free

UBCS
...ubcs
3dfind.it
catalog: a&t
3dfindit
free

UBC
...ubc
3dfind.it
catalog: a&t
thingiverse
free

Holder stand for Uniden UBC 125 XLT
...ingiverse
new holder for my uniden ubc 125 xlt.
print both parts and simply glue together with ca.
fits in perfectly.
enjoy :-)
thingiverse
free

Nederlandse Spoorwegen Ubcs wagon, GAUGE 1/1:32 by Robertino
... buffers, couplings, etc.......... is the same as i applied to my other designs for rolling stock. look at these for the details.
thingiverse
free

ball bearing (UBC6000Z) flanged holder by rtrigo
...00-2z-precision-steel-bearing-inner-ring-1cm-21666) and 3 x m3 socket cap screw housings (bearing fastening and holder fixation).
thingiverse
free

Yet Another Universal Spool Holder - Ultra Complex Edition by ozgurayberk
...parts - only 2 off-the-shelf bearings (i used these: https://www.conrad.ch/fr/roulement-a-billes-radial-ubcbearing-626-2z-198844.html, but any other bearing should be very easy to...
grabcad
free

Roombot - UBC Enph 253
... final solidworks model for the 2016 ubc engineering physics enph 253 uberbot robotics competition submission by team 6 - roombot
grabcad
free

Roombot In Progress - UBC Enph 253
...roombot in progress - ubc enph 253
grabcad
an in-progress iteration of the chassis for the robot roombot
grabcad
free

F209 Bearing Housing-UBC branded
...anded
grabcad
killing some time and needed this for part of another model. feel free to add configurations for other size's.
Prototype
3ddd
$1

iphone (prototype)
...e (prototype)
3ddd
iphone prototype телефон сотовый прототип , iphone
iphone (prototype)
turbosquid
$60

prototype
...y free 3d model prototype for download as , fbx, stl, and obj on turbosquid: 3d models for games, architecture, videos. (1516333)
turbosquid
free

prototype
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Prototype Crossbow
...squid
free 3d model prototype crossbow for download as blend on turbosquid: 3d models for games, architecture, videos. (1237541)
turbosquid
$25

Atlas Prototype
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$20

Prototype Airplane
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

starship prototype
...y manufactured in boca chica ,texas by spacex. this prototype consist features like forward flaps, bottom flaps and landing legs.
design_connected
$11

Jellyfish Chandelier (prototype)
...sakai design associate jellyfish chandelier (prototype) pendant lights computer generated 3d model. designed by toshihiko sakai.
turbosquid
free

Prototype Plasma Rifle
...d
free 3d model prototype plasma rifle for download as blend on turbosquid: 3d models for games, architecture, videos. (1237576)
turbosquid
$15

Prototype CNC Router
... model prototype cnc router for download as iam, ige, and stl on turbosquid: 3d models for games, architecture, videos. (1667298)
Modular
3ddd
$1

MODULAR
...modular
3ddd
modular , врезной свет
modular потолочные светильники
3ddd
$1

Modular Spock
...modular spock
3ddd
modular
modular spock
3ddd
$1

MODULAR / Spock
...modular / spock
3ddd
modular
modular/spock
design_connected
$7

Modular
...modular
designconnected
emmemobili modular shelves and storage computer generated 3d model. designed by ferruccio laviani.
3ddd
$1

Modular spock
...modular spock
3ddd
modular
spock wall led
turbosquid
$25

Modular sofa Angelo Cappellini Modular
...a angelo cappellini modular for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1570923)
turbosquid
$15

Modular sofa Angelo Cappellini Modular
...a angelo cappellini modular for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1570304)
3ddd
$1

Modular 2FLAT2C
...modular 2flat2c
3ddd
modular
modularhttp://www.supermodular.com/
3d_export
free

Modular walls
...modular walls
3dexport
modular walls for playing without materials and textures
3ddd
$1

Modular / Lighting Juliette
...modular / lighting juliette
3ddd
modular
modular lighting juliette
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Robots
3d_ocean
$20
Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45
Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18
Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7
Robot
...robot
3dexport
robot
3d_export
$5
robot
...robot
3dexport
robot
3d_export
free
Robot
...robot
3dexport
robot
turbosquid
$10
Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5
robot
...robot
3dexport
robot in blender
3ddd
$1
robot
...robot
3ddd
робот
robot
3ddd
$1
Robot
...robot
3ddd
робот
robot
Arm
archibase_planet
free

Arm
...ase planet
arm hand right hand skeleton
arm human skeleton right arm n030515 - 3d model (*.gsm+*.3ds+*.max) for 3d visualization.
3ddd
$1

arm chair
...arm chair
3ddd
arm chair , пуф
arm chair
turbosquid
$5

arm
...arm
turbosquid
royalty free 3d model arm for download as obj on turbosquid: 3d models for games, architecture, videos. (1306158)
turbosquid
free

Arm
...arm
turbosquid
free 3d model arm for download as obj and fbx on turbosquid: 3d models for games, architecture, videos. (1346955)
turbosquid
$29

Arm
...osquid
royalty free 3d model arm for download as obj and fbx on turbosquid: 3d models for games, architecture, videos. (1382436)
3d_export
$5

coat of arms
...coat of arms
3dexport
coat of arms
3ddd
$1

ARM SOFA
...arm sofa
3ddd
arm sofa
3ddd
$1

Arm chair
...arm chair
3ddd
arm chair
3ddd
$1

Arm chair
...arm chair
3ddd
угловое
arm chair
3ddd
$1
ARM CHAIR
...arm chair
3ddd
arm chair clothes
Make
3d_export
$5

make make planet
...make make planet
3dexport
turbosquid
$1

Make
...ke
turbosquid
royalty free 3d model make for download as obj on turbosquid: 3d models for games, architecture, videos. (1403181)
3ddd
free

make up
...make up
3ddd
косметика
makeup
turbosquid
$65

Make an interior
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$5

Make Up Stand
...bosquid
royalty free 3d model make up stand for download as on turbosquid: 3d models for games, architecture, videos. (1542368)
turbosquid
$12

make up table
...quid
royalty free 3d model make up table for download as max on turbosquid: 3d models for games, architecture, videos. (1280789)
turbosquid
$1

Make up desk
...oyalty free 3d model make up desk for download as max and obj on turbosquid: 3d models for games, architecture, videos. (1222023)
turbosquid
$1

Make up desk
...oyalty free 3d model make up desk for download as max and obj on turbosquid: 3d models for games, architecture, videos. (1222007)
turbosquid
$29

Ammo making machine
...aking machine for download as max, unitypackage, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1572915)
turbosquid
$29

Making light Collection
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.