GrabCAD

Lunar TORCH
by GrabCAD
Last crawled date: 1 year, 11 months ago
Lunar TORCH
Please have a look at the attached PDF-file and/or follow YouTube link for video: https://youtu.be/RPjsD9r9nak
Now that the competition is over, I added a few more links, hopefully making it easier to understand the principles.
https://youtu.be/DLO9hRlaj1s
https://youtu.be/iDRmBiZfOXo
https://youtu.be/CxjNwaEVFHE
https://he-ideas.weebly.com/ideas-and-stuff.html
I chose to focus on:
• Reliable construction
• Low center of gravity
• Stable through unfolding and use
• Low placement of most motors
• Simple construction
• Easy handling – unfolding-adjustment-folding
• Self-cleaning
One of the main concerns is avoiding the whole construction to overturn during use as the rover has a rather small contact area compared to the 10 square meter big mirror.
To obtain that, several things were done:
• A counter revolution of the mirror during unfolding
• Controlled unfolding of the scaffold/stand
• Individual controlled Support legs for levelling
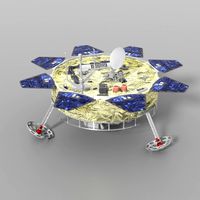
The construction consist of seven mirrors carried by a central gear mechanism, an foldable stand/arm system and a base with four support legs. The base is mounted on a rover (not in the scope).
A short description of each system follows:
• 6 of the mirrors are basically alike, only the connection to the gear system differs slightly.
• The 7. mirror is a slightly bigger to obtain the 10 square meter area and is equipped with solar cell surface.
• The mirrors are sort of stacked and unfolded separately by a central gear mechanism.
• The gear has 6 ‘output’, so each mirror is driven/rotated individually. By gearing them together, their movements are controlled during the entire unfolding and folding sequences.
• The gear also have a mechanism that makes it possible to tilt each mirror and thereby change the focus.
• The foldable arm system is made so the arms are geared together and thereby can be driven from the base
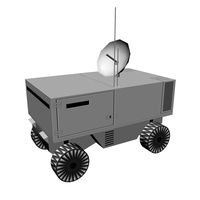
• The base is mounted on a rover, and can be levelled by four independent legs.
• The stand/arms system is pivoted on the base and the can be rotated 360 degrees. By turning the arm system the mirrors will be turned as well.
Unfolding sequence:
1. The rover is moved to the wanted location.
2. The legs are turned out and each of them is lowered until the rover is in horizontal level in both directions (the rover might be lifted a bit off the ground).
3. The stand/arm system is stretched up to its vertical position.
4. The mirror gear system is activated, causing the mirrors to unfold while keeping its center of gravity close to the center of the base.
5. The whole mirror is turned to the wanted reflection angle both horizontal and vertical.
6. The mirrors focal point is adjusted to the wanted distance by tilting the mirrors common adjusting mechanism.
Comments:
The mirrors are made as an 10x10mm aluminum frame with a thin polished aluminum plate making a shiny surface.
The gears are all made of aluminum. Due to the teeth module, the gearing makes different gaps between the mirrors, but this will not have any effect on the mirror function. Loose tolerances secure that the gear will continue function even if it is covered with dust. If needed the gear could be in capsuled and heated.
Only three motors are needed to unfold, focus and balance the mirrors. The rest of the motors are located at the base level.
Because of the very stable and easy unfolding and folding sequence, it will be easy to move the rover to new exiting places. The mirror adjustment will also be easy to do remotely.
The estimated weight is:
• Mirrors and gear system is 38kg
• Base, legs and Arm/stand is 54kg (might be optimized)
• Total estimated weight less than 100kg (excluding the rover)
Please have a look at the attached PDF-file and/or follow YouTube link for video: https://youtu.be/RPjsD9r9nak
Now that the competition is over, I added a few more links, hopefully making it easier to understand the principles.
https://youtu.be/DLO9hRlaj1s
https://youtu.be/iDRmBiZfOXo
https://youtu.be/CxjNwaEVFHE
https://he-ideas.weebly.com/ideas-and-stuff.html
I chose to focus on:
• Reliable construction
• Low center of gravity
• Stable through unfolding and use
• Low placement of most motors
• Simple construction
• Easy handling – unfolding-adjustment-folding
• Self-cleaning
One of the main concerns is avoiding the whole construction to overturn during use as the rover has a rather small contact area compared to the 10 square meter big mirror.
To obtain that, several things were done:
• A counter revolution of the mirror during unfolding
• Controlled unfolding of the scaffold/stand
• Individual controlled Support legs for levelling
The construction consist of seven mirrors carried by a central gear mechanism, an foldable stand/arm system and a base with four support legs. The base is mounted on a rover (not in the scope).
A short description of each system follows:
• 6 of the mirrors are basically alike, only the connection to the gear system differs slightly.
• The 7. mirror is a slightly bigger to obtain the 10 square meter area and is equipped with solar cell surface.
• The mirrors are sort of stacked and unfolded separately by a central gear mechanism.
• The gear has 6 ‘output’, so each mirror is driven/rotated individually. By gearing them together, their movements are controlled during the entire unfolding and folding sequences.
• The gear also have a mechanism that makes it possible to tilt each mirror and thereby change the focus.
• The foldable arm system is made so the arms are geared together and thereby can be driven from the base
• The base is mounted on a rover, and can be levelled by four independent legs.
• The stand/arms system is pivoted on the base and the can be rotated 360 degrees. By turning the arm system the mirrors will be turned as well.
Unfolding sequence:
1. The rover is moved to the wanted location.
2. The legs are turned out and each of them is lowered until the rover is in horizontal level in both directions (the rover might be lifted a bit off the ground).
3. The stand/arm system is stretched up to its vertical position.
4. The mirror gear system is activated, causing the mirrors to unfold while keeping its center of gravity close to the center of the base.
5. The whole mirror is turned to the wanted reflection angle both horizontal and vertical.
6. The mirrors focal point is adjusted to the wanted distance by tilting the mirrors common adjusting mechanism.
Comments:
The mirrors are made as an 10x10mm aluminum frame with a thin polished aluminum plate making a shiny surface.
The gears are all made of aluminum. Due to the teeth module, the gearing makes different gaps between the mirrors, but this will not have any effect on the mirror function. Loose tolerances secure that the gear will continue function even if it is covered with dust. If needed the gear could be in capsuled and heated.
Only three motors are needed to unfold, focus and balance the mirrors. The rest of the motors are located at the base level.
Because of the very stable and easy unfolding and folding sequence, it will be easy to move the rover to new exiting places. The mirror adjustment will also be easy to do remotely.
The estimated weight is:
• Mirrors and gear system is 38kg
• Base, legs and Arm/stand is 54kg (might be optimized)
• Total estimated weight less than 100kg (excluding the rover)
Similar models
grabcad
free

Mechanical arm rover
...mechanical arm rover
grabcad
mechanical arm rover for lunar missions or military use.
grabcad
free

Blooming Lunar torch with Myrad mirror mechanism.
...icle specs. the overall design is very light weight and thanks to the active ball joint and linear-actuated mirror bases precise.
3dwarehouse
free

HSA rover with lander
...gear. it carries the hsa rover to the surface of the moon. #arm #engines #gear #hsa #lander #landing #lunar #moon #rover #surface
thingiverse
free

Super-accurate adjustable mobile phone stand mechanism by Jorge_CM
...ar 1, gear 2, gear 3 and gear 4.
2- up, screw and tray.
3- gear cover.
4- down.
the name of each part is specified in the images.
grabcad
free
![[B-10-RB] - Lunar TORCH](/t/10860567.jpg)
[B-10-RB] - Lunar TORCH
...-perseverance-rover-3d-model/
2. bullet-proof origami by brigham young university (heliostat system)
https://youtu.be/p_ezsoex5mq
grabcad
free

Stand on adjustable legs
...stand on adjustable legs
grabcad
stand on adjustable legs for aluminum profile conveyor
grabcad
free

SunChaser (NASALunarTorch)
...-40-1
moon picture credit: https://www.wallpaperflare.com/black-and-white-concrete-surface-apollo-moon-landscape-wallpaper-281271
grabcad
free
![[B-10-RB] - Moon Rover Lunar Heliostat TORCH V.1](/t/10870796.jpg)
[B-10-RB] - Moon Rover Lunar Heliostat TORCH V.1
...-perseverance-rover-3d-model/
2. bullet-proof origami by brigham young university (heliostat system)
https://youtu.be/p_ezsoex5mq
grabcad
free

Stand on adjustable legs
...stand on adjustable legs
grabcad
stand on adjustable legs for aluminum profile conveyor v3.0
grabcad
free

Stand on adjustable legs
...stand on adjustable legs
grabcad
stand on adjustable legs for aluminum profile conveyor v2.0
Lunar
3ddd
free

erba lunare
...erba lunare
3ddd
erba
erba lunare
turbosquid
$10

Suppressor Lunar
...quid
royalty free 3d model suppressor lunar for download as on turbosquid: 3d models for games, architecture, videos. (1380407)
3ddd
$1

Lunar lounge
...ounge
3ddd
stellarworks
модель кресла lunar lounge от производителя stellar works. габаритные размеры 850x710x800. 23k полигонов.
turbosquid
$62
Lunar Lander
... free 3d model lunar lander for download as obj, fbx, and lxo on turbosquid: 3d models for games, architecture, videos. (1185844)
turbosquid
$10

Lunar Chair
...y free 3d model lunar chair for download as 3ds, obj, and dae on turbosquid: 3d models for games, architecture, videos. (1219708)
3ddd
free

Диван Lunar
...d710xh800mm. в архиве есть текстуры, файлы в 2011 и 2014 версиях и obj-файл. 8,5k полигонов. turbo-/meshsmooth при необходимости.
turbosquid
$39

Lunar Sword
...e 3d model lunar sword for download as max, obj, fbx, and dae on turbosquid: 3d models for games, architecture, videos. (1440758)
turbosquid
$10

Lunar Armchair
...del lunar armchair by jamni for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1566066)
turbosquid
$1
Lunar car
...e 3d model lunar car for download as 3ds, obj, md3, and blend on turbosquid: 3d models for games, architecture, videos. (1209060)
turbosquid
$99

Lunar Plow
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Torch
3d_ocean
$16

Torch
...flashlight high poly model. day high poly torch light mag lite night lamp rays shine new torch torch
high detailed 3d torch model
design_connected
$13

Torch
...torch
designconnected
established & sons torch computer generated 3d model. designed by willenz, sylvain .
3ddd
$1

Baccarat - Torch
...- torch
3ddd
baccarat , torch
торшер фирмы baccarat, модель torch, текстуры прилагаются.
turbosquid
$10

Torch
...h
turbosquid
royalty free 3d model torch for download as max on turbosquid: 3d models for games, architecture, videos. (1364794)
turbosquid
$4

Torch
...h
turbosquid
royalty free 3d model torch for download as c4d on turbosquid: 3d models for games, architecture, videos. (1264168)
turbosquid
free

Torch
...urbosquid
free 3d model torch for download as , fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1598202)
turbosquid
$5

torch
...quid
royalty free 3d model torch for download as max and stl on turbosquid: 3d models for games, architecture, videos. (1531004)
turbosquid
$1

Torch
...d
royalty free 3d model torch for download as , fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1622961)
3d_export
free

torch
...torch
3dexport
turbosquid
$10

Torch
...
royalty free 3d model torch for download as ma, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1194449)