Thingiverse
Knee or mecanic elbow (Compact model) by routex
by Thingiverse
Last crawled date: 3 years ago
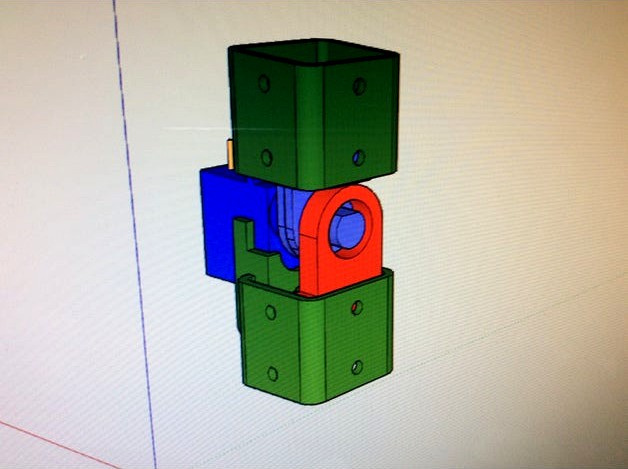
The overall project is to make a robot about 75cm tall. To begin, I identified 2 types of movement for all joints (other than eyes and hands). This part of the project is for joints such as compact model of elbows and knees. https://www.thingiverse.com/thing:3091483 was my original, but I need save space on some parts of the body.
The elongated rectangular parts will serve as framework and parts to "attach" the visual appearance of the robot. The frame will also serve to guide the wires so that they are visible as little as possible.
Printed parts:
1x Compact-Rotate-A: Servo motor supports
1x Compact-Rotate-B: Supports bearings to reduce energy loss through friction
1x Compact-Rotate-C1: Supports bearings to reduce energy loss through friction
1x Compact-Rotate-C2: Receive servo motor movement
1x Compact-Rotate-D: Any receiving bone adapted to change as needed
Non-printed parts:
1x SG90 servo motor
1x Bearing 8x12x3.5
4x M2.5 8mm screws
3x M2.5 nuts
Steps:
1 - Put a small white piece supplied with the servo motor to insert it into the "Compact-Rotate-C2" piece
2 - Insert nuts in completes spaces for nuts in "Compact-Rotate-C1" and "Compact-Rotate-C2"
3 - Slide the "Compact-Rotate-C1" and "Compact-Rotate-C2" pieces into the slot of the "Compact-Rotate-D" and screew them
4 - Insert the bearing and one nut in the "Compact-Rotate-B" piece
5 - Srew pieces "Compact-Rotate-A" and "Compact-Rotate-B" together
6 - Insert the round end of the "Compact-Rotate-C1" parts into the bearing
7 - Insert carfully servo motor in "Compact-Rotate-A" piece and the little white piece
8 - Screw servo motor in "Compact-Rotate-A" piece
The elongated rectangular parts will serve as framework and parts to "attach" the visual appearance of the robot. The frame will also serve to guide the wires so that they are visible as little as possible.
Printed parts:
1x Compact-Rotate-A: Servo motor supports
1x Compact-Rotate-B: Supports bearings to reduce energy loss through friction
1x Compact-Rotate-C1: Supports bearings to reduce energy loss through friction
1x Compact-Rotate-C2: Receive servo motor movement
1x Compact-Rotate-D: Any receiving bone adapted to change as needed
Non-printed parts:
1x SG90 servo motor
1x Bearing 8x12x3.5
4x M2.5 8mm screws
3x M2.5 nuts
Steps:
1 - Put a small white piece supplied with the servo motor to insert it into the "Compact-Rotate-C2" piece
2 - Insert nuts in completes spaces for nuts in "Compact-Rotate-C1" and "Compact-Rotate-C2"
3 - Slide the "Compact-Rotate-C1" and "Compact-Rotate-C2" pieces into the slot of the "Compact-Rotate-D" and screew them
4 - Insert the bearing and one nut in the "Compact-Rotate-B" piece
5 - Srew pieces "Compact-Rotate-A" and "Compact-Rotate-B" together
6 - Insert the round end of the "Compact-Rotate-C1" parts into the bearing
7 - Insert carfully servo motor in "Compact-Rotate-A" piece and the little white piece
8 - Screw servo motor in "Compact-Rotate-A" piece
Similar models
thingiverse
free

Knee or mecanic elbow by routex
...knee-d1" and "knee-d2"
12 - aim the "knee-c-2x" parts on the open side of the "knee-a" part
thingiverse
free

Mechanical rotate by routex
...;rotate-f" part transmits the movement to the axis of rotation.
10- screw the servo motor into the "rotate-a" part
thingiverse
free

Parametric Shoulder Joint for SpotMicroESP32 by projunk
... part limbtopshell.stl is the same as the original part "limb_top_shell.stl" except for the screw hole for the bearing.
thingiverse
free

Forklift module for SMARS by tristomietitoredeituit
...rial from my links, it will not cost you extra money and you will allow me to finance new projects! i would really appreciate it!
thingiverse
free

Simple rotating end effector for EEEZYbotARM big by 730d05
...0d05
thingiverse
simple 180 degree tower servo rotating
what you need
1x 608 bearing
1 tower servo sg90
1x m3x30 screw
1x m3 nut
grabcad
free

Knee-joint based Energy Harvester
...nergy in electric energy. due to movement of leg about knee piezoelectric strips gets vibrated and than produces electric energy.
thingiverse
free

Simple rotating end effector for EEEZYbotARM big by 730d05
...180 degree tower servo rotating
what you need
1x http://www.ebay.com/bhp/688-bearing
1 tower servo sg90
1x m3x30 screw
1x m3 nut
grabcad
free

Polycentric prosthetic knee
... physical activities. however, they can be more expensive and require more maintenance than simpler hinge-style prosthetic knees.
grabcad
free

Knuckle-joint press
...sed by fully encapsulated pressing body!
cardanic knee joint guidance! low-loss force distribution by a flexible main knee joint.
thingiverse
free

9g servo motor holders by tirfil
...or support (up to three servo motors).
two components:
u-part enables l module to rotate.
l-part supports up to two servo motors.
Routex
thingiverse
free

Bracket by routex
...bracket by routex
thingiverse
simple as you see. save time for not go to hardware store, but need time to print.
thingiverse
free

Motor support by routex
...motor support by routex
thingiverse
support for motor in open rc f1.
thingiverse
free

Score Counter by routex
...score counter by routex
thingiverse
can be use for damage counter or low score keeping.
thingiverse
free

NRF24L01 by routex
...
thingiverse
i made this nrf24l01 model for help me for more complex components to do. use it for save time and multiple tries..
thingiverse
free

TB6612FNG by routex
...thingiverse
i made this tb6612fng model for help me for more complex components to do. use it for save time and multiple tries..
thingiverse
free

Quoridor Travel size by routex
...quoridor travel size by routex
thingiverse
this is a travel size quoridor game.
thingiverse
free

Frame hook by routex
...frame hook by routex
thingiverse
hook for frame fixed to the wall by a screw or a nail.
this is my first design, be indulgent.
thingiverse
free

Servo SG90 by routex
...hingiverse
i made this servo sg90 model for help me for more complex components to do. use it for save time and multiple tries..
thingiverse
free

Mouse trap by routex
...it away from home in the wild.
for the rods supporting the 2 free bottle of pepsi, simply take 2 small pieces of 1.75mm filament.
thingiverse
free

Clip filament by routex
...e to be clip for new filament.
bigest hole must be used first for let filament go easier and the smaler for the end of filament.
Mecanic
turbosquid
$8

mecanical alarm clock
...yalty free 3d model mecanical alarm clock for download as c4d on turbosquid: 3d models for games, architecture, videos. (1542140)
3d_export
$5

mecanical lighter
...onents so can be animated if you put in the work. view download and comment. render was done in keyshot. thank you for your time.
3d_export
$39

Carburetor 3D Model
...carburetor 3d model 3dexport carburetor pocket bike mecanic detailled detail engine car vehicle auto animation animated motor...
3d_export
$5

Simple Mecanizm 3D Model
...3dexport simple mecanizm 3d model tranzmision transform rotate animated mecanicl car vehicle phyzics simulation industrial tool machine simple mecanizm...
3d_ocean
$15

Robot MAX 2011
...2011 3docean animate atomata automate ciborg cool electronic hidrahulic mecanic modern robot run technology velocity wheel cool robot max...
thingiverse
free

Mecanism by nagato
...mecanism by nagato
thingiverse
mecanism
thingiverse
free

Mecanics by nagato
...mecanics by nagato
thingiverse
mecanics
thingiverse
free

MECANIC PIECE by leonk
...mecanic piece by leonk
thingiverse
mecanic piece
thingiverse
free

MECANIC PIECE by leonk
...mecanic piece by leonk
thingiverse
mecanic piece
thingiverse
free

MECANIC PIECE by leonk
...mecanic piece by leonk
thingiverse
mecanic piece
Knee
3d_export
$34

Knee Replacement
...h meets the lower leg. ... during a total knee replacement, the end of the femur bone is removed and replaced with a metal shell.
turbosquid
$25

Knee ligaments
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$84

Knee Anatomy
.... the smaller bone that runs alongside the tibia (fibula) and the kneecap (patella) are the other bones that make the knee joint.
turbosquid
$50

animated knee bone
...ee 3d model knee bone for download as ma, fbx, blend, and dae on turbosquid: 3d models for games, architecture, videos. (1473639)
turbosquid
$39

Knee Pad Green
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$13

Knee Tumor Prosthesis
... for download as 3ds, max, ige, obj, wrl, fbx, stl, and sldas on turbosquid: 3d models for games, architecture, videos. (1464660)
turbosquid
$2

Knee Operated Hand Sink
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
cg_studio
$179

Knee Joint Anatomy3d model
....c4d .3ds .xsi .obj .max .ma .lxo - knee joint anatomy 3d model, royalty free license available, instant download after purchase.
3d_export
$5

Tactical knees 3D print model
...nd they are also incorporated into military uniforms such as the army combat uniform and the marine corps combat utility uniform.
turbosquid
$35

Abstract mannequin kick knee 73
...ract mannequin kick knee 73 for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1673363)
Elbow
3d_export
$5

elbow door knob
...elbow door knob
3dexport
elbow door knob
turbosquid
$10

Elbow Engine
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1

PVC elbow
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Elbow Crab.
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5

thin elbow door knob
...thin elbow door knob
3dexport
thin elbow door knob
3d_export
$10

ELBOW Elbow Fabric Eiffel Armchair
...~ 100,000 model parts: 1 texture format: .png .jpg resolution: 1024*1024 pbr in substance painter formats: .obj .gltf .fbx .blend
turbosquid
$10

realistic elbow chair
...ealistic elbow chair for download as blend, obj, fbx, and dae on turbosquid: 3d models for games, architecture, videos. (1629079)
turbosquid
$5

Elbow combined with fastening outer
...model elbow combined with fastening outer for download as max on turbosquid: 3d models for games, architecture, videos. (1558602)
3d_export
$12

90 degree welded steel elbows-din2605
...90 degree welded steel elbows-din2605
3dexport
welded steel elbows. all standards are included in the package. din2605
3d_export
$19

ch20 elbow chair 2 options
...ch20 elbow chair 2 options
3dexport
Compact
3d_export
$5

compact freezer
...compact freezer
3dexport
the compact freezer is product about refrigeration machine
3d_ocean
$8

Compact Cassette
...
80s album analog audio cartridge cassette compact digital electronics lp mp3 music play record sound tape vinyl
compact cassette
design_connected
$20

Eames Compact
...eames compact
designconnected
herman miller eames compact computer generated 3d model. designed by eames, charles.
3d_ocean
$2

Compact Disc
...compact disc
3docean
album audio cd compact disc dvd laser disc movie music
a cd
3d_export
$10

land compacter
...land compacter
3dexport
turbosquid
$1

Compact knife
...quid
royalty free 3d model compact knife for download as obj on turbosquid: 3d models for games, architecture, videos. (1557900)
3d_export
$12

compact rotary broach
...compact rotary broach
3dexport
compact tool for drilling hexagonal holes in lathes!
turbosquid
free

Lada Compact
... 3d model lada compact for download as max, max, max, and fbx on turbosquid: 3d models for games, architecture, videos. (1623122)
turbosquid
$59

Compact Truck
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$50

Compact kitchen
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.