Thingiverse
Inline Peristaltic Pump for Nema 17 Stepper by ractorIII
by Thingiverse
Last crawled date: 3 years, 4 months ago
tested and operational - to see in action, follow @earlyamericanrobotpottery on instagram.
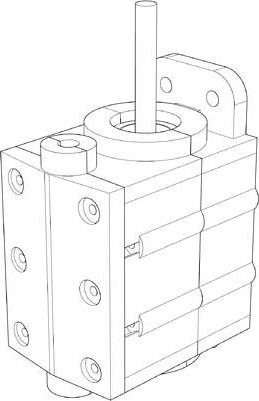
This is an inline peristaltic pump designed to be controlled with a NEMA 17 stepper for the conveying and deposition of liquid slurries. All printable components printed solid in ABS on a Taz 6 3d printer - some components have to be machined. I was able to cut the shafts and pins in my own shop but outsourced the end bushings to be machined in brass (.stl files included but plastic will not be satisfactory).
The pump uses a series of bearings on eccentric spacers to sequentially compress silicone tubing. I use commonly available silicone catheter tubing (1/8" ID 1/4" OD) - making it appropriate for conveying a wide array of materials, including food.
This model is designed with a cleated bottom mount and 2 mounting holes spaced 20mm apart for mounting inline with 40mm aluminum extrusion.
Additional Requirements:
M3 screws and Hex Nuts, a variety of lengths
M3 thermal inserts
2 mm rod - used to key the eccentric spacers to each other and to the end bushings
0.25" stainless shaft
2 x Brass end bushings* - I had mine machined but they could be printed in brass through shapeways (.stl file is included but printing in plastic will not be strong enough)
M3 tap and set screws for the brass end bushings
2 x end bushing bearings (16mm x 28mm x 7mm)
8 x actuator bearings (12mm x 21mm x 5mm)
6.35mm to 5mm flexible coupler
The lower cleat mount and nema17 motor mount are provided here as courtesy
This is an inline peristaltic pump designed to be controlled with a NEMA 17 stepper for the conveying and deposition of liquid slurries. All printable components printed solid in ABS on a Taz 6 3d printer - some components have to be machined. I was able to cut the shafts and pins in my own shop but outsourced the end bushings to be machined in brass (.stl files included but plastic will not be satisfactory).
The pump uses a series of bearings on eccentric spacers to sequentially compress silicone tubing. I use commonly available silicone catheter tubing (1/8" ID 1/4" OD) - making it appropriate for conveying a wide array of materials, including food.
This model is designed with a cleated bottom mount and 2 mounting holes spaced 20mm apart for mounting inline with 40mm aluminum extrusion.
Additional Requirements:
M3 screws and Hex Nuts, a variety of lengths
M3 thermal inserts
2 mm rod - used to key the eccentric spacers to each other and to the end bushings
0.25" stainless shaft
2 x Brass end bushings* - I had mine machined but they could be printed in brass through shapeways (.stl file is included but printing in plastic will not be strong enough)
M3 tap and set screws for the brass end bushings
2 x end bushing bearings (16mm x 28mm x 7mm)
8 x actuator bearings (12mm x 21mm x 5mm)
6.35mm to 5mm flexible coupler
The lower cleat mount and nema17 motor mount are provided here as courtesy
Similar models
thingiverse
free

Peristaltic pump for NEMA17 motor by Lorenzo1995
...mple peristaltic pump for nema 17 stepper motor
needed parts:
2 m3x20 screw
3 ball bearing 686zz
silicon pipe id 2/3mm od 5/6mm
thingiverse
free

NEMA-17 Peristaltic Pump V2 by CopabX
...e.com/products/copabx/nema-17-peristaltic-pump-kit/
build instructionshttp://www.instructables.com/id/nema-17-peristaltic-pump/
thingiverse
free

Double Peristaltic Pump for NEMA 17 Stepper for DIN Rail by jimmysleep
...er printing is listed below:
8x m3x20mm bolts
8x m3x25mm bolts
8x m3 nuts
1x 20cm silicone hose (6/4mm)
2x nema 17 stepper
enjoy!
thingiverse
free

NEMA-17 Peristaltic Pump by CopabX
...s
two m3x12mm screws
four 8mm od, 3mm id bearings
one nema-17 stepper motor (at least 4 kg/cm)
2mm od, 1mm id soft silicon tubing
thingiverse
free

Peristaltic Pump by Grodart
...ll give you an idea of how it works.
https://www.reddit.com/r/functionalprint/comments/fqr4np/in_search_of_the_perfect_gin_tonic/
thingiverse
free

Peristaltic pump by MarcoKl
...silicon tube your favourite stepper driver arduino, esp or similar features: depends on your code. for example: i use...
thingiverse
free

NEMA 17 Planetary Peristaltic by jpoles1
...hex nut
2x m3x8mm screw
2x m3x12mm screw
1x m3x20mm screw
assembly:https://youtu.be/yoxqnr08qai
demo:https://youtu.be/xacaiiekafa
thingiverse
free

Small peristaltic pump for 28BYJ-48 stepper motor. by jsvorc
...
i was looking for some peristaltic pump with larger diameter. i check thingyverse and found only small pumps so i designed mine.
thingiverse
free

peristaltic pump, roller pump with auto occlusion by eilandes
...provide use of different tubing sizes. the pump is intended to be driven by a stepper motor (nema 17) either directly or by belt.
thingiverse
free

Nema17 peristaltic pump by Cristian2281
...mp and pin. rollers to be printed if not using mr105zz bearings.
this is still a work in progress and should be treated as such.
Peristaltic
thingiverse
free

Peristaltic pump by Daniele_Dondi
...peristaltic pump by daniele_dondi
thingiverse
precise peristaltic pump
thingiverse
free

Peristaltic Pump by Muzeem
...peristaltic pump by muzeem
thingiverse
a peristaltic pump with minimum components
thingiverse
free

Peristaltic pump by JKUgalde
...ingiverse
instructions at my github https://github.com/jkugalde/3d-printed-peristaltic-pump
tested with glycerine.
for a nema17.
thingiverse
free

Peristaltic pump by JKUgalde
...de
thingiverse
a 3d printed peristaltic pump, more info at the project repository
i use it to pump glycerine, works really well.
thingiverse
free

Peristaltic Pump parametric by avoronin
...ump parametric by avoronin
thingiverse
this open scad paramentric peristaltic pump.
https://www.youtube.com/watch?v=sm2wdyk5xfi
thingiverse
free

Peristaltic Pump by piuLAB
...r "hydroponic l.i.s.a." (http://www.thingiverse.com/thing:414271) but it is possible to adapt it for any other machine.
thingiverse
free

Peristaltic pump by astrobiologist
...peristaltic pump by astrobiologist
thingiverse
edited .scad offline
thingiverse
free

High precision peristaltic pump by carlesoriol
...high precision peristaltic pump by carlesoriol
thingiverse
high precision peristaltic pump. can be used with some cnc structure
thingiverse
free

Parametric Peristaltic Pump by zignig
...tp://www.thingiverse.com/thing:8652http://www.thingiverse.com/thing:8914
the motor mounting still needs some work but its a start
thingiverse
free

Micro Peristaltic Pump by neoaikon
...the best choice.
included is also a 2.25" version for use with 1/4" tubing. this version is suitable for .4mm nozzles.
Inline
thingiverse
free

PiNews by Inliner
...pinews by inliner
thingiverse
pi
thingiverse
free

Ship by Inliner
...ship by inliner
thingiverse
ship
thingiverse
free

Triature by Inliner
...triature by inliner
thingiverse
smile!
thingiverse
free

BatTreshka by Inliner
...battreshka by inliner
thingiverse
bat.
thingiverse
free

Sword by Inliner
...sword by inliner
thingiverse
learning sculptris
thingiverse
free

NotStrongEnough by Inliner
...notstrongenough by inliner
thingiverse
5 min fun with sculptris.
thingiverse
free

AlienHello by Inliner
...alienhello by inliner
thingiverse
hi, i'm alien
thingiverse
free

Flower by Inliner
...flower by inliner
thingiverse
first 5 minute try to model a flower.
thingiverse
free

Alien by Inliner
...alien by inliner
thingiverse
my first model, maybe somebody will like it
thingiverse
free

CatFace by Inliner
...catface by inliner
thingiverse
just trying to make something useful) learning)
Nema
thingiverse
free

Nema 14 to Nema 17 Adapter by lukepat
...nema 14 to nema 17 adapter by lukepat
thingiverse
created a adapter for nema 14 to nema 17 mount.
thingiverse
free
Distance Nema 17 and Nema 23 by Krzysztof_Handtke
...distance nema 17 and nema 23 by krzysztof_handtke
thingiverse
distance to nema motors to build a cnc milling machine.
thingiverse
free

NEMA 23 to NEMA 17 adapter by green_domingo
...ingiverse
nema 23 to nema 17 adapter for z motors. i think you can use it for axes and extruder (if used with long-base pulley).
thingiverse
free

NEMA-17_Mounting_Bracket by mr_paiko
...nema-17_mounting_bracket by mr_paiko
thingiverse
mounting bracket for nema 17
thingiverse
free

Adapter / Spacer Nema 17 to Nema 23 by kingworld
...ned to fit a nema 23 stepper motor in nema's 17 mounting holes, it also hold a flexible coupler so, acts as an spacer as well
thingiverse
free

Nema 23 to Nema 17 conversion plate adapter by Fintech
...on plate adapter by fintech
thingiverse
i made this to convert my nema 23 to nema 17
https://www.youtube.com/watch?v=cfq2pmnnra8
thingiverse
free

Nema 17 by sandwe
...nema 17 by sandwe
thingiverse
nema 17 follow focus .scad
thingiverse
free

Shaft pointer for NEMA 17 and NEMA 23 8mm
...ma 17 and nema 23 8mm
thingiverse
did not like using zip ties , so out of boredom i made these. the nema 23 is for an 8mm shaft.
thingiverse
free

NEMA-34 mount to NEMA-23 motor adapter plate by the_digital_dentist
...ma-23 motor adapter plate by the_digital_dentist
thingiverse
this thing lets you mount a nema-23 motor on a nema-34 motor mount.
thingiverse
free

Nema 17 to Nema 23 Adapter by peterllfp
...to use pla.
the nema 23 adapter plate can be mounted using m5 cap soc screws. the nema 17 can be mounted using m3 cap soc screws.
Pump
thingiverse
free

Pump by DominikWachow
...pump by dominikwachow
thingiverse
water pump
thingiverse
free

pump insertion
...pump insertion
thingiverse
these pump inserts are pretty accurate
thingiverse
free

Bilge Pump into bait washdown pump
...this on instead.
the standard pumps are less than $20, and a bait pump is almost $100 in some cases, so this saved me some money.
thingiverse
free

Pump plug for WMFG kite pump by mcfly777
...pump plug for wmfg kite pump by mcfly777
thingiverse
thingiverse
free

Pump Handle by averageboi
...pump handle by averageboi
thingiverse
pump handle for wgp trilogy pump kits. it might work for any other wgp pump kit.
thingiverse
free

gear pump by MisterPlay
...gear pump by misterplay
thingiverse
gear pump
thingiverse
free

Air Pump by schwaiger
...air pump by schwaiger
thingiverse
vacuum pump
thingiverse
free

pump impeller by eslyuta
...pump impeller by eslyuta
thingiverse
pump impeller
thingiverse
free

Pump Boss by Sandgrounder
...pump boss by sandgrounder
thingiverse
pump boss
thingiverse
free

water pump by TanyaAkinora
...water pump by tanyaakinora
thingiverse
water pump
17
thingiverse
free

17 by AM3Drucken
...17 by am3drucken
thingiverse
zum 17. geburtstag
thingiverse
free

25/17 by andr56338
...25/17 by andr56338
thingiverse
25/17
thingiverse
free

Heart # 17 by wslab
...heart # 17 by wslab
thingiverse
heart # 17
thingiverse
free

Mandalorian Dagger 17
...mandalorian dagger 17
thingiverse
mandalorian dagger 17
thingiverse
free

B-17 by mavrick5150
...b-17 by mavrick5150
thingiverse
a b-17 bomber.
thingiverse
free
Nema 17 by sandwe
...nema 17 by sandwe
thingiverse
nema 17 follow focus .scad
thingiverse
free

DC-17 by benjaminkovacs
...dc-17 by benjaminkovacs
thingiverse
star wars battlefront ii dc-17
thingiverse
free

Nema 17 mount by Cronoflyer
...nema 17 mount by cronoflyer
thingiverse
mounts for nema 17 stepper.
supporti per motori nema 17.
thingiverse
free

Bowl # 17 by wslab
...bowl # 17 by wslab
thingiverse
bowl # 17
search "wslab" over 300 designs.
thingiverse
free

B-17 by Jkeat5
...b-17 by jkeat5
thingiverse
boeing b-17 flying fortress. used by the british and americans at europe.
Stepper
thingiverse
free

stepper motor
...stepper motor
thingiverse
this is experimental.
a nearly fully 3d printed stepper motor.
thingiverse
free

stepper bracket by Brennenenenenen
...stepper bracket by brennenenenenen
thingiverse
stepper motor bracket thats holds the stepper at a 90 degree angle
thingiverse
free

Stepper Attachment by googlebleh
...stepper attachment by googlebleh
thingiverse
for a 5mm stepper
thingiverse
free

Mount stepper by Salin
...mount stepper by salin
thingiverse
stepper 42mm
thingiverse
free

STEPPER PICCOLO by SergioPapagni
...stepper piccolo by sergiopapagni
thingiverse
stepper piccolo
thingiverse
free

Stepper Motor Piece
...stepper motor piece
thingiverse
this is for a stepper motor
thingiverse
free

stepper by DogmaGab
...stepper by dogmagab
thingiverse
a
thingiverse
free

Stepper Motor by kevin02
...stepper motor by kevin02
thingiverse
a model of a stepper motor
thingiverse
free

Stepper Cooler by utilitybee
... a 40mm fan and zip tie to stepper.
brought my stepper temps from 80c to 40c
was made to work on the smaller nema 17 steppers
thingiverse
free

Stepper motor by umbertocilia
...stepper motor by umbertocilia
thingiverse
stepper motor from harddrive