Thingiverse
Howme the robot by manchi
by Thingiverse
Last crawled date: 2 years, 12 months ago
This is a work in progress. All files will be uploaded later. The robot is a design of my own any ideas on how to make it look better are welcome :)
The parts are designed and exported to stl using SolidWorks.
The robot has its own website http://howme.net , but it is still under major changes.
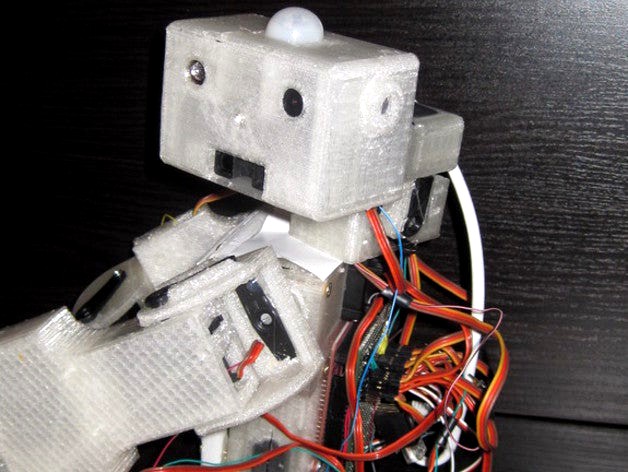
These are the printable parts (at their current state) of my robot. This is its third version. All parts are designed to fit with a cheap MG995 servos. They are standard servo sizes so most servo machines may match (if the design works as I expect I am planing to supply it with better servos). The whole robot is powered by 15 servo machines.
The head is equipped with a wireless pinhole camera, laser, Sharp infrared sensor, two microphones in its ears (there is a room for pre-amp), a place for a RGB diode as a nose, at the top there is a place for a motion sensor.
(*The Bill of materials with links will be updated later.)
I was running all servos using Arduino Mega, but I am switching to FEZ Panda II. The board should be placed at the back.
The body is shallow and may contain small electronics or something else.
The arms are designed to fit solar panels from a solar phone charger or similar.
The Front is designed to hold a 16x2 display (to be designed with a holder).
There should be a room for a speaker as I have added text to speech board to the system.
The robot is designed to be a Johnnie 5 type so I am planning to add caterpillar tracks found here on thingiverse, but yet have to design the body that will hold the batteries and the tracks. The robot is equipped with double reduction gear (each for every track) and being controlled by a motor driver.
The software can be tracked here (it is also under progress) : http://code.google.com/p/howme/
Update
There is a base with tracked links. Checkout the last image, but the problem is the body can be optimized because it takes too much material and I had to print it more then 12 hours. It should hold the reduction gear for the tracks and two packs of batteries. I hope the batteries are heavy enough to make it stable when moving around.
The parts are designed and exported to stl using SolidWorks.
The robot has its own website http://howme.net , but it is still under major changes.
These are the printable parts (at their current state) of my robot. This is its third version. All parts are designed to fit with a cheap MG995 servos. They are standard servo sizes so most servo machines may match (if the design works as I expect I am planing to supply it with better servos). The whole robot is powered by 15 servo machines.
The head is equipped with a wireless pinhole camera, laser, Sharp infrared sensor, two microphones in its ears (there is a room for pre-amp), a place for a RGB diode as a nose, at the top there is a place for a motion sensor.
(*The Bill of materials with links will be updated later.)
I was running all servos using Arduino Mega, but I am switching to FEZ Panda II. The board should be placed at the back.
The body is shallow and may contain small electronics or something else.
The arms are designed to fit solar panels from a solar phone charger or similar.
The Front is designed to hold a 16x2 display (to be designed with a holder).
There should be a room for a speaker as I have added text to speech board to the system.
The robot is designed to be a Johnnie 5 type so I am planning to add caterpillar tracks found here on thingiverse, but yet have to design the body that will hold the batteries and the tracks. The robot is equipped with double reduction gear (each for every track) and being controlled by a motor driver.
The software can be tracked here (it is also under progress) : http://code.google.com/p/howme/
Update
There is a base with tracked links. Checkout the last image, but the problem is the body can be optimized because it takes too much material and I had to print it more then 12 hours. It should hold the reduction gear for the tracks and two packs of batteries. I hope the batteries are heavy enough to make it stable when moving around.
Similar models
thingiverse
free

Robot Tank Track by Arikoth
...st version of my standard servo gear to go with it. finishing up a free spin clip in case you only want one drive servo per side.
thingiverse
free

Tamiya Robot Platform Upper v1 by Snarky
...re parts in. right now it's designed to hold a servo to mount a sonar sensor. i plan to upgrade it for an array of sensors.
thingiverse
free

Koomba - Robot Chassis by Kris_B_Printin
... supports 4xaa battery pack.
chassis top: holds arduino uno and adafruit motorshield on top. secures to bottom with a press fit.
thingiverse
free

Spider Robot by 3DSantama
...ervos, because the sg90 servos have little power to hold up stable the robot.
later i will create new parts for the mg996r servos
thingiverse
free

Robot leg v.HS-55 by HuGoroN
...idge to add a little stiffness to the leg assembly.
also i'm terrible at spelling so corrected few errors here and there ;)
thingiverse
free

Mechanical Robot Hand (designed for EZ Robot JD) by LaurinNEO
...ess!
update 2019/03/28:
the servo fits and the parts are moving.
i am currently working on making the fingers move more reliably.
thingiverse
free

worm gear 40:1 reduction ratio by normanbutchgrant
... ( hence the abs).
it has to be printed in high resolution as it is a proper gear design. i use nema 23 as the driving motor
thingiverse
free

Robotino
...able-management and board mounts will be added
using raspberry pi zero
using myrobotlab or robot operating system
adding a camera
thingiverse
free

TOM Tri-Track triple servo robot tank chassis by masneyb
...ld it between the drivetrain servos.
note: i did not create these 3d models. they were created by the other projects listed here.
thingiverse
free

Easy to build robot - Wendell the Robot by marc_cryan
...n inkscape.
parts -
plywood body
5 servo motors (2 are continuous)
arduino 1
batteries
a little servo board
thanks for looking!!

Robot
thingiverse
free

Robot
...robot
thingiverse
robot toy model
thingiverse
free

ROBOT (Family computer robot) by Dryprinting
...robot (family computer robot) by dryprinting
thingiverse
the retro robot from the nes days!
thingiverse
free

Reicher Robotics Robotic Cougar by catholicrobot
...he mascot for the robotics team. the second iteration was modified to be easier to print and to better align with school branding
thingiverse
free

Robot by MichaelArsenic
...robot by michaelarsenic
thingiverse
a robot
thingiverse
free

ROBOT by rich1341
...robot by rich1341
thingiverse
robot
thingiverse
free

robot by kennedycaseyy
...robot by kennedycaseyy
thingiverse
robot
thingiverse
free

Robot by Dublwatr
...robot by dublwatr
thingiverse
this is a robot.
thingiverse
free

Robot by Dzecko
...robot by dzecko
thingiverse
robot
thingiverse
free

Robot by robert29296
...robot by robert29296
thingiverse
robot
thingiverse
free

robot by lhartman81
...robot by lhartman81
thingiverse
robot