GrabCAD

HALO Lunar Sampling System
by GrabCAD
Last crawled date: 1 year, 12 months ago
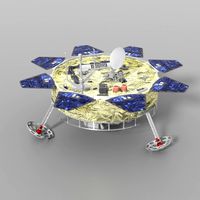
The HALO LSS for separating 1-2m rocks from smaller pieces and dust contain an inner rotating filtering cylinder in aluminum sheet metal, alternatively with an additional inner layer of Teflon to ensure low friction and good gliding capability. The inner filtering cylinder has small cutouts for small regolith pieces and dust, covering around 300 degrees of the cylinder surface area. The rest of the circular surface area (60 degrees) have larger cutouts for rocks of sizes <= 2cm. The HALO unit need to be attached to a rover arm, to be able to collect material from the ground surface and to be powered.
The procedure steps to collect and filter Regolith using the HALO LLS are:
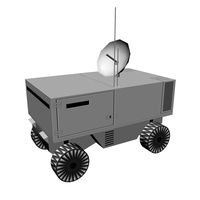
1. The complete HALO-unit is placed near the ground and is tilted forward by the robot arm, so that the spoon get buried down in the ground <10cm deep.
2. The rover will drive forward in slow speed to collect material until the spoon is filled up(determined using camera on rover).
3. When the spoon is filled up, the robot arm, on which the HALO-unit is attached to, will lift up the unit and tilt back in an angle so that the regolith begins to slide down along inside the rotating filtering cylinder. The filtering process is being helped by the Eccentric rotating mass (ERM) onto a motor which create vibrations in the unit.
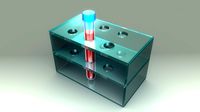
4. The filtering process begin, the filtering cylinder is rotated back and forth in a repeating sequence , within the 300 degrees interval, until all the fine small Regolith is filtered down to the second chamber (outer cylinder), gliding down and being collected into the container (using camera in the HALO to monitor results). The filtering process is being helped here as well by the ERM-motor.
5. The filtering cylinder then rotate to the next remaining surface area of 60 degrees-interval of big cutouts to collect the remaining rocks down to the second chamber (outer cylinder) and then gliding down into the container. It is rotated back and forth in the interval until all rocks are collected.
6. The robot arm with the HALO tilt down again and any remaining rocks larger than 2cm will fall out from the cylinder down to the ground. Now the procedure is finished and can be repeated until the container is full of deposits, consisting by layers of fine regolith and rocks, separated from each other.
Materials:
The skeletal enclosure is carbon fiber in side plates and pipes, which is strong and lightweight and can withstand extreme temperatures with minimal thermal expansion. Plastics used are PFA or PEEK, also resistant to wide range of temperatures. Custom made plastic bearings are used to keep low weight.
Specs:
Weight: 0,65kg, excl camera (requirement of 0.5kg not fully achieved, inner cylinder may be made shorter or smaller in diameter to cut weight).
Materials: Aluminum, (alt. Teflon), Carbon Fiber, Plastic PFA or PEEK
Power Usage: Max 10W
Total number of parts: 29
Motors: Step motor Nema 8 and Nema 11
Suggested Rotating Speed: 2-3RPM
Choice of camera: To be decided by NASA.
/Josef Snabb
_ _ _
Calculations:
Required Torque (T) to choose motor
Maximum acquired regolith weight: m= 0,3kg
Radius on inner rotating tube: R=44,5mm = 0,0445m
T=F*R, were F=m*a, which means T=m*a*R
Gravitational acceleration on the moon, a=1,625m/s^2
And we get:
T=0,3*1,625*0,0445 = 0,0217Nm, converted to = 2,17Ncm
Required Torque due to Moment of inertia to rotate the inner tube will be so small and will be neglected. Same thing with friction loss in bearings. Approximately a maximum of 2,5Ncm will be required. Which means Step motor “Nema 8” at 1,6Ncm is too weak, therefore “Nema 11” at 6Ncm is selected.
Note #1!
My idea concept of submission is NOT any copy or inspiration of any other submission whatsoever. My creation was developed before any similar concepts from other users was submitted, Image File can be sent to prove original concept date, by looking at date in digital properties of the file.
Note #2: I realized that one dimension is incorrect for the function, i.e the space between the inner and outer cylinder, it is only 1,45cm and should be minimum 2cm so that rocks at 2cm size fits while gliding down into the container and not get stuck in between.
Best Regards
Josef Snabb
The procedure steps to collect and filter Regolith using the HALO LLS are:
1. The complete HALO-unit is placed near the ground and is tilted forward by the robot arm, so that the spoon get buried down in the ground <10cm deep.
2. The rover will drive forward in slow speed to collect material until the spoon is filled up(determined using camera on rover).
3. When the spoon is filled up, the robot arm, on which the HALO-unit is attached to, will lift up the unit and tilt back in an angle so that the regolith begins to slide down along inside the rotating filtering cylinder. The filtering process is being helped by the Eccentric rotating mass (ERM) onto a motor which create vibrations in the unit.
4. The filtering process begin, the filtering cylinder is rotated back and forth in a repeating sequence , within the 300 degrees interval, until all the fine small Regolith is filtered down to the second chamber (outer cylinder), gliding down and being collected into the container (using camera in the HALO to monitor results). The filtering process is being helped here as well by the ERM-motor.
5. The filtering cylinder then rotate to the next remaining surface area of 60 degrees-interval of big cutouts to collect the remaining rocks down to the second chamber (outer cylinder) and then gliding down into the container. It is rotated back and forth in the interval until all rocks are collected.
6. The robot arm with the HALO tilt down again and any remaining rocks larger than 2cm will fall out from the cylinder down to the ground. Now the procedure is finished and can be repeated until the container is full of deposits, consisting by layers of fine regolith and rocks, separated from each other.
Materials:
The skeletal enclosure is carbon fiber in side plates and pipes, which is strong and lightweight and can withstand extreme temperatures with minimal thermal expansion. Plastics used are PFA or PEEK, also resistant to wide range of temperatures. Custom made plastic bearings are used to keep low weight.
Specs:
Weight: 0,65kg, excl camera (requirement of 0.5kg not fully achieved, inner cylinder may be made shorter or smaller in diameter to cut weight).
Materials: Aluminum, (alt. Teflon), Carbon Fiber, Plastic PFA or PEEK
Power Usage: Max 10W
Total number of parts: 29
Motors: Step motor Nema 8 and Nema 11
Suggested Rotating Speed: 2-3RPM
Choice of camera: To be decided by NASA.
/Josef Snabb
_ _ _
Calculations:
Required Torque (T) to choose motor
Maximum acquired regolith weight: m= 0,3kg
Radius on inner rotating tube: R=44,5mm = 0,0445m
T=F*R, were F=m*a, which means T=m*a*R
Gravitational acceleration on the moon, a=1,625m/s^2
And we get:
T=0,3*1,625*0,0445 = 0,0217Nm, converted to = 2,17Ncm
Required Torque due to Moment of inertia to rotate the inner tube will be so small and will be neglected. Same thing with friction loss in bearings. Approximately a maximum of 2,5Ncm will be required. Which means Step motor “Nema 8” at 1,6Ncm is too weak, therefore “Nema 11” at 6Ncm is selected.
Note #1!
My idea concept of submission is NOT any copy or inspiration of any other submission whatsoever. My creation was developed before any similar concepts from other users was submitted, Image File can be sent to prove original concept date, by looking at date in digital properties of the file.
Note #2: I realized that one dimension is incorrect for the function, i.e the space between the inner and outer cylinder, it is only 1,45cm and should be minimum 2cm so that rocks at 2cm size fits while gliding down into the container and not get stuck in between.
Best Regards
Josef Snabb
Similar models
grabcad
free

Nasa Rotating arm machine
...olith will be collect into container.my design requires only one stepper motor. my designed machine can be attach to robotic arm.
grabcad
free

Regolith Scoop Filter
... power. lastly, to manage the temperature of the electronics, the system will use reflective shielding to maintain internal heat.
grabcad
free

lunar sample collector
...tion of outer driver fill regolith another rotation fill rock.by rotating servo motor less than 1 cm material can be filled
grabcad
free

NEMA KANJENG LUNAR SAMPLING
... the arm has risen more than 60 degrees regolith will be slipped into the container that has been filtered between rock and dust.
grabcad
free

NASA Lunar Sampling System Design Challenge- Option 1
... ppt snapshots. please review and provide feedback.
ps: i am working on a variation of this concept and will be submitting soon.
grabcad
free

Cheese Grater Sampler
...wer of 30 watts.
this is a first run at the design and i will continue to make improvements, as well as reduce the overall mass.
grabcad
free

NASA Lunar Sampling System Design Challenge- Option 2
... that arm would handle.
this concept is an extension of my earlier submitted option 1. please review and let me know your views.
grabcad
free

RASSOR bucket drum
... cylinder can fill up to 100% capacity. rotating the outer shell in the opposite direction will then release the regolith inside.
grabcad
free
![[REGOLITH REAPER] NASA Lunar Sampling System](/t/5621266.jpg)
[REGOLITH REAPER] NASA Lunar Sampling System
...nsor reports that it is full.
optical regolith level sensors are based on ir proximity sensors.
best regards,
andrzej laczewski
grabcad
free

Regolith Sampler Concept
...n change the position of the container to alternate the layers of regolith and rocks.
(detailed/refined description to be added)
Lunar
3ddd
free

erba lunare
...erba lunare
3ddd
erba
erba lunare
turbosquid
$10

Suppressor Lunar
...quid
royalty free 3d model suppressor lunar for download as on turbosquid: 3d models for games, architecture, videos. (1380407)
3ddd
$1

Lunar lounge
...ounge
3ddd
stellarworks
модель кресла lunar lounge от производителя stellar works. габаритные размеры 850x710x800. 23k полигонов.
turbosquid
$62
Lunar Lander
... free 3d model lunar lander for download as obj, fbx, and lxo on turbosquid: 3d models for games, architecture, videos. (1185844)
turbosquid
$10

Lunar Chair
...y free 3d model lunar chair for download as 3ds, obj, and dae on turbosquid: 3d models for games, architecture, videos. (1219708)
3ddd
free

Диван Lunar
...d710xh800mm. в архиве есть текстуры, файлы в 2011 и 2014 версиях и obj-файл. 8,5k полигонов. turbo-/meshsmooth при необходимости.
turbosquid
$39

Lunar Sword
...e 3d model lunar sword for download as max, obj, fbx, and dae on turbosquid: 3d models for games, architecture, videos. (1440758)
turbosquid
$10

Lunar Armchair
...del lunar armchair by jamni for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1566066)
turbosquid
$1
Lunar car
...e 3d model lunar car for download as 3ds, obj, md3, and blend on turbosquid: 3d models for games, architecture, videos. (1209060)
turbosquid
$99

Lunar Plow
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Halo
3ddd
$1

Halo
...halo
3ddd
halo
бра,диаметр 46см,
3ddd
$1

Vibia / Halo
...vibia / halo
3ddd
vibia
подвес halo от vibia
turbosquid
$5

Halo
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Halo - Professor
...halo - professor
3ddd
halo
http://homeconcept.ru/catalog/section.php?section_id=18998#tab_0_0
3ddd
free

Artifort Halo
...t halo
3ddd
halo , artifort
в архиве max 2014 / fbx
чертеж с размерами на 3 изображении.
3ddd
$1

Halo Huntington
...--------------------------------------
polygons: 520605
vertices: 525856
единицы измерения - real world size (system units - mm)
3ddd
$1

Halo
...r
l 125 d 87 h 109 sh 39 cm
sofa
l 242 d 87 h 109 sh 39 cm
designer
skrivo
year of design: 2015http://www.softline.dk
turbosquid
$3

HALO RING
...rbosquid
royalty free 3d model halo ring for download as stl on turbosquid: 3d models for games, architecture, videos. (1355249)
turbosquid
$5

Artemide - Halo
...lty free 3d model artemide - halo for download as max and obj on turbosquid: 3d models for games, architecture, videos. (1159228)
3ddd
$1

Artemide CLS Halo
...artemide cls halo
3ddd
artemide
artemide cosmic leaf soffitto halo
Sampling
turbosquid
$15

Tree Sample
...royalty free 3d model tree sample for download as max and fbx on turbosquid: 3d models for games, architecture, videos. (1238276)
turbosquid
$9

Blood Sample
... free 3d model blood sample for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1305026)
turbosquid
$2

Face Sample
...free 3d model face sample for download as blend, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1586198)
turbosquid
$3

Sampling Bin
... 3d model sampling bin for download as max, fbx, 3ds, and obj on turbosquid: 3d models for games, architecture, videos. (1596035)
turbosquid
$39
Blood sample
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

monkey sample
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5

Headphone Sample
...created as a sample using solidworks. the rar file contains .sldprt file and .stl file. the 3d model can be used for 3d printing.
turbosquid
$30

coffee Sampling Bag
...royalty free 3d model coffee sampling bag for download as 3ds on turbosquid: 3d models for games, architecture, videos. (1697356)
turbosquid
$7

Medicine Bottle Sample
...e 3d model medicine bottle sample for download as obj and fbx on turbosquid: 3d models for games, architecture, videos. (1332437)
turbosquid
$10

Living Room Sample
...living room sample for download as unitypackage, max, and fbx on turbosquid: 3d models for games, architecture, videos. (1705843)
System
archibase_planet
free

System
...m
archibase planet
fire alarm system fire alarm box
security light system - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Spider system
...stem spider glass system
spider system to fix glass stefano galli n050912 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3ddd
$1

Euforia System
...euforia system
3ddd
euforia
euforia system
3d_export
$50

Roof system Truss system 3D Model
...oof system truss system 3d model
3dexport
roof system truss truss stage
roof system truss system 3d model aleksbel 38970 3dexport
3ddd
$1

DVD System
...dvd system
3ddd
dvd , schneider
dvd system
design_connected
free

Seating system
...seating system
designconnected
free 3d model of seating system
3d_export
$5

solar system
...solar system
3dexport
solar system in c4d, with 8k nasa textures
3ddd
$1

Quanta System
...quanta system
3ddd
медицина
quanta system.
лазерное оборудование для медицинских центров
3d_export
$15

solar system
...nd the other the sun, the earth and the moon, the latter has an animation with camera movement included, the files are in spanish
3d_export
$14

missile system
...missile system
3dexport