GrabCAD

FRC Team 1325 2020 Competition Robot
by GrabCAD
Last crawled date: 1 year, 11 months ago
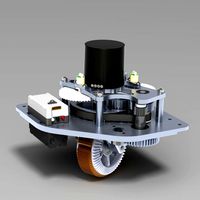
I personally designed the Shooter/turret, intake and feeder subsystems
Intake:
The intake subsystem is one of the more important subsystems, the design and function affect the performance and effectiveness of the feeder and shooter alike. With this in mind, special care was taken to ensure the success of the intake. Currently, the intake consists of box tube construction, a single vectoring roller and pivots off of a custom gearbox. The box tube construction like most of our robots allows for easy modification later on. The motor pivot makes use of the versatility of the versa planetary gearboxes and combines it with a custom external reduction to produce a pivot that is not only fast but strong, reliable and not subject to losing position
Feeder:
The feeder is used to store the collected power cells in the robot. The feeder can hold 5 power cells in the robot at a time. The main goal of the feeder is to transport power cells from the intake to the shooter. The feeder utilizes belts and pulleys to move the balls through the system.
Shooter:
Our goal for this shooter was to shoot reliably from 20+ ft, allowing us to shoot undefended with an unblockable shot due to the shooter's height. The flywheel is a 4” aluminum wheel capable of running up to ~11,000 rpm on a 2:1 reduction powered by two NEO motors. Whereas the hood assembly consists of a stack of vertical Lexan pieces to make the hood contour, within this stack the central pieces are mounted on sliders such that when powered with pistons they extend, altering the launch angle of the ball.
Intake:
The intake subsystem is one of the more important subsystems, the design and function affect the performance and effectiveness of the feeder and shooter alike. With this in mind, special care was taken to ensure the success of the intake. Currently, the intake consists of box tube construction, a single vectoring roller and pivots off of a custom gearbox. The box tube construction like most of our robots allows for easy modification later on. The motor pivot makes use of the versatility of the versa planetary gearboxes and combines it with a custom external reduction to produce a pivot that is not only fast but strong, reliable and not subject to losing position
Feeder:
The feeder is used to store the collected power cells in the robot. The feeder can hold 5 power cells in the robot at a time. The main goal of the feeder is to transport power cells from the intake to the shooter. The feeder utilizes belts and pulleys to move the balls through the system.
Shooter:
Our goal for this shooter was to shoot reliably from 20+ ft, allowing us to shoot undefended with an unblockable shot due to the shooter's height. The flywheel is a 4” aluminum wheel capable of running up to ~11,000 rpm on a 2:1 reduction powered by two NEO motors. Whereas the hood assembly consists of a stack of vertical Lexan pieces to make the hood contour, within this stack the central pieces are mounted on sliders such that when powered with pistons they extend, altering the launch angle of the ball.
Similar models
grabcad
free

FRC6328 2020 FIRST Robotics Shooter
... will be on our 2020 frc competition robot. powered by 2 neo and 2 neo550 motors with a 3 position pneumatically adjustable hood.
grabcad
free

Scale FRC Robot
...t mini power cells using a wind-up mechanism, the turret would be able to rotate, and the intake can be moved to different angles
grabcad
free

FRC 2020 Robot - Team 3255
...tor
- falcon 500 powered climber winch gearbox
intake
- falcon 500 powered zip tie intake
control panel spinner
- double roller
grabcad
free

2020 - Infinite Recharge Shooter
... pinion. the flywheel is powered by two neo motors with a 1:4 belt ratio capable of shooting 7" foam balls upwards of 20 ft.
grabcad
free

2020 - Infinite Recharge
... pinion. the flywheel is powered by two neo motors with a 1:4 belt ratio capable of shooting 7" foam balls upwards of 20 ft.
grabcad
free

FRC Intake
...earbox. in practice, it would likely need a 16:1 gearbox to generate enough torque to compress the ball to get it into the robot.
grabcad
free

Smokey - 2019 - FRC 5145 WolfBotics
...mber designed to reach hab levels 2 and 3! our drivetrain and ball intake were unfortunately the only consistent parts of smokey.
grabcad
free

1 Stage MiniCIM Intake Gearbox
...ounts to box tube, and runs power in tube to drive an intake roller. off-season design from 2016 for frc 5811 by peter salisbury.
grabcad
free

triple reduction helical gearbox
...-box
triple reduction gearbox which makes a reduction ratio equal to (38:1) for a motor power rating equal to (33.5kw @1440 rpm)
grabcad
free

FRC 2022 Robot - Team 3255, The SuperNURDs
...sal climber
- chain driven elevator
- single falcon 500
drivetrain
- 4" wheels all colsons
- dual falcon 500
- chain driven
1325
turbosquid
$15

human-1325
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
free

STILLUX 1325/22
...stillux 1325/22
3ddd
stillux
lamapade da tavolo stillux 1325/22
l = 32 cm
h = 40 cm
foglia oro
turbosquid
$75

Historical Medieval Sword c. 1325
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$50

3D Home 1325 3D Model
...chair furniture texture table lamp apartment rug carpet restaurant hotel sitting
3d home 1325 3d model richard3015 45531 3dexport
3ddd
$1

Rosseto Armobil Dune
...603 мм глубина 43 мм высота 558 стол ширина: 1325 высота: 735 глубина:...
3d_ocean
$25

Castle Ruin Pack Low poly 3d Model
...a low poly castle ruins. castle texture size: #1: 1325973 in size. #2: 1063×1600 in size. #3: 1172×3000 in...
3d_export
$7

Base Hair for Boy V42
...much more.<br>you can view in my profile.<br>features:<br>- verts : 1325lt;br>- edges : 2747<br>- faces : 1424<br>- tris : 2646<br>-...
3dfindit
free

770-1325
...770-1325
3dfind.it
catalog: wago
3d_sky
free

1325/22 STILLUX
...1325/22 stillux
3dsky
modern stillux
lamapade da tavolo stillux 1325/22
l = 32 cm
h = 40 cm
foglia oro
thingiverse
free

Champagne flute created in PARTsolution by Dape
...by dape thingiverse champagne flute created in partsolution (cadenas) http://b2b.partcommunity.com/community/partcloud/index#!part?name=champagne+flute&model_id=1325 ...
Frc
turbosquid
$80

FRC MOB BOAT
... 3d model frc mob boat for download as max, obj, fbx, and dwg on turbosquid: 3d models for games, architecture, videos. (1508461)
3d_export
$6

Overall Design of Robot for FRC Competition
...overall design of robot for frc competition
3dexport
overall design of robot for frc competition
3d_export
$7

Power Ups Team 4639 bot for the 2018 FRC season
...power ups team 4639 bot for the 2018 frc season
3dexport
power up's team 4639 bot for the 2018 frc season
3d_export
$10
wheel 360 degree
...wheel 360 degree 3dexport frc team 1690 is proud to present our 2019 off...
3dfindit
free

FRC
...frc
3dfind.it
catalog: festo
3dfindit
free

FRC
...frc
3dfind.it
catalog: festo
3dfindit
free

FRCS
...frcs
3dfind.it
catalog: festo
thingiverse
free

FRC RSL holder
...frc rsl holder
thingiverse
frc robot signal light holder
3dfindit
free

FRC (USA)
...frc (usa)
3dfind.it
catalog: festo
3dfindit
free

FRC (USA)
...frc (usa)
3dfind.it
catalog: festo
Competition
turbosquid
$29

Competitive inhibition
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

Dodge Viper Competition Coupe
...dodge viper competition coupe
3dexport
2003 dodge viper competition coupe
turbosquid
$60

Futuristic Competition Shotgun
...e 3d model futuristic competition shotgun for download as fbx on turbosquid: 3d models for games, architecture, videos. (1623432)
turbosquid
$1

Competition Ball (pokeball)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

competition car seat
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$6
Overall Design of Robot for FRC Competition
...overall design of robot for frc competition
3dexport
overall design of robot for frc competition
3d_export
$69

BMW-X5M Competition 2023
...bmw-x5m competition 2023
3dexport
3d_export
$69

BMW-X6M Competition 2023
...bmw-x6m competition 2023
3dexport
turbosquid
$175

Tv Studio Competition Design
...ree 3d model tv studio competition design for download as max on turbosquid: 3d models for games, architecture, videos. (1624196)
turbosquid
$175

Tv Studio Competition Design
...ree 3d model tv studio competition design for download as max on turbosquid: 3d models for games, architecture, videos. (1624183)
2020
3d_export
$5

cyberpunk 2020
...cyberpunk 2020
3dexport
cyberpunk 2020
3d_export
$5
monster01 2020
...monster01 2020
3dexport
monster01 2020 dxf file rigged in mixamo.
3d_export
$129

explorer 2020
...explorer 2020
3dexport
3d_export
$5

mug 2020
...mug 2020
3dexport
3d_export
$15

3 rims 2020
...3 rims 2020
3dexport
new rims 2020 from inventor
turbosquid
$7

Keepsake of 2020
...ty free 3d model keepsake of 2020 for download as obj and stl on turbosquid: 3d models for games, architecture, videos. (1657350)
3d_export
$35

landrover 2020
...landrover 2020
3dexport
turbosquid
$15

Timeless 2020
...free 3d model timeless 2020 for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1433362)
turbosquid
$85

Q8 2020
... free 3d model audi q8 2020 for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1559582)
turbosquid
$59

Supra 2020
...ee 3d model supra 2020 for download as max, lwo, obj, and c4d on turbosquid: 3d models for games, architecture, videos. (1404492)
Team
design_connected
$13

Team
...team
designconnected
arper team computer generated 3d model. designed by lievore, alberto.
3ddd
$1

Team 7
...team 7
3ddd
team 7
моделилось с кталога team 7
3ddd
free

team 7
...team 7
3ddd
team 7
стол фабрики team 7.
типы размеров /900,1000/x/1750,2000,2250/x/750/
раздвигается +600 или +1200
3d_export
$99

basketball team
...basketball team
3dexport
basketball team 3d model. rigged. include obj, fbx files.
design_connected
$18

Team - trestle
...team - trestle
designconnected
arper team - trestle computer generated 3d model. designed by lievore, alberto.
3ddd
$1

TEAM 7 Atelier
...team 7 atelier
3ddd
team 7 , стол
производитель team 7
модель atelier
3ddd
$1

Банкетка Flex Team
... , flex team
http://www.abitant.com/products/banketka-flex-team-2014-kilt-pouf
3d_export
$65

mountaineering team
...mountaineering team
3dexport
simple rendering of the scene file
3d_export
$65

Camel team
...camel team
3dexport
simple rendering of the scene file
3ddd
$1

Стол Joha-team - BaumArt
... joha , team
стол от joha-team, под названием baumart
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot