GrabCAD

Cadathon Swerve drive Tri-bot
by GrabCAD
Last crawled date: 1 year, 11 months ago
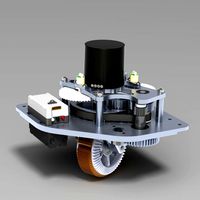
This is a Swerve Drive Tri-bot Chassis designed by FRC team 6635.
It is designed to use two Rev NEO motors per wheel, and as a result this design has a relatively low gear ratio per wheel.
This robot is optimized for high speeds of travel, meaning that it should not get into pushing fights.
This swerve drive was developed for our entry into the F4 Cadathon competition, and is not very feasible to produce in real life.
It is designed to use two Rev NEO motors per wheel, and as a result this design has a relatively low gear ratio per wheel.
This robot is optimized for high speeds of travel, meaning that it should not get into pushing fights.
This swerve drive was developed for our entry into the F4 Cadathon competition, and is not very feasible to produce in real life.
Similar models
grabcad
free

Swerve Drive | 1640 – Sab-BOT-age
...swerve drive | 1640 – sab-bot-age
grabcad
2013 swerve module
grabcad
free

Aluminum Falcon 1823
...aluminum falcon 1823
grabcad
designated defense bot with swerve drive and spring force climber.
grabcad
free

Mini NEO Swerve V1
...mini neo swerve v1
grabcad
slightly rushed swerve for an upcoming cadathon.
grabcad
free

Team 6635 H-Bot Prototype Chassis
...season, we finished designing this h-bot chassis for additional practice, and to diversify the drivetrain experience of our team.
grabcad
free

Swerve Drive ver177
... conventional build, reducing the height required for the swerve drive. a little rushed swerve drive, compatible for 3d printing.
grabcad
free

8th f4 cadathon bot team 510
...8th f4 cadathon bot team 510
grabcad
this is the bot for the 8th f4 cadathon
grabcad
free

Swerve Drive
...x drivetrain in which each wheel both spins and turns independently of the other wheels.
https://lbd172.wixsite.com/swervedrive
grabcad
free

FRC 3452 - Swerve Drive Treads
...ive. these treads were meant to be printed with tpu filling. these are a tight fit.
thrifty bot: https://www.thethriftybot.com/
grabcad
free

FRC 3452 Swerve Drive Treads
...ive. these treads were meant to be printed with tpu filling. these are a tight fit.
thrifty bot: https://www.thethriftybot.com/
grabcad
free

Off-Season Swerve Drive
...off-season swerve drive
grabcad
off-season swerve drive design.
Cadathon
grabcad
free

Cadathon 2018
...cadathon 2018
grabcad
frc cadathon
grabcad
free

Cadathon 6
...cadathon 6
grabcad
team 297 robot for cadathon 6. got 7th place.
grabcad
free

KRYPTON Cadathon
...krypton cadathon
grabcad
rob^^o feito pela equipe krypton frc para om desafio cadathon
grabcad
free

WRRF CADathon - Ring It In
...wrrf cadathon - ring it in
grabcad
2nd place in the wrrf cadathon
grabcad
free

Robot Cadathon 2017
...robot cadathon 2017
grabcad
precadded models for cadathon 2017
grabcad
free

Team 250 9th CADathon
...team 250 9th cadathon
grabcad
cadathon team 250s 5th and final cadathon entry.
grabcad
free

Matterhorn Cadathon 5
...matterhorn cadathon 5
grabcad
submission by team 44 for the 5th biannual f4 cadathon
grabcad
free

CADathon Prep Brackets
...cadathon prep brackets
grabcad
green generation pre-game frc cadathon brackets to comply with rules 7.4.1 of the manual
grabcad
free

F4 CADathon 8
...f4 cadathon 8
grabcad
f4 cadathon 8 in half an hour because my first one got deleted.
grabcad
free

F4 CADathon winter 2017
...f4 cadathon winter 2017
grabcad
f4 cadathon winter 2017
Swerve
3d_export
$10
wheel 360 degree
...1690 is proud to present our 2019 off season swerve module design! this design was heavily inspired by swerve...
thingiverse
free

Sehome Seamonsters Swerve (S3) Drive by LoboCNC
...structions, and also the complete solidworks design files (sehomeswerve.zip).
developed by frc team 2605 - the sehome seamonsters
thingiverse
free

Sehome Swerve Drive 2 by LoboCNC
... operating quite smoothly so far. next up is getting our full swerve drive control implemented so that we can really beat on it!
thingiverse
free

PRINT Swerve by FTC Robocracy 9773 by ftcrobocracy
...ers that the models were weirdly scaled, we updated them in order to be more properly scaled, when being imported into the slicer
thingiverse
free

Coaxial Swerve Module by jillls101
...l appeal to a robot, but currently lacks enough structural stability to function as a sole mounting point for the swerve modules.
3d_sky
free

Closet Classic - Victoria
...bed, nightstand, dresser, closet. model format max 2009. stack swerve. ...
3d_sky
free

Cupboard classic - Victoria
...bed, nightstand, dresser, closet. model format max 2009. stack swerve. ...
3d_sky
free

Classic chest of drawers - Victoria
...bed, nightstand, dresser, closet. model format max 2009. stack swerve. ...
thingiverse
free

Nerf Strongarm Extended Barrel by MECVDMC
... in place. the barrel increases accuracy as it decreases vertical and horizontal swerving usually present when using elite darts.
thingiverse
free

Chevrolet Express Dash insert - lip balm holder by Spectt84
...evrolet express work van. i'm pretty sure they used the same dash design for a few years so i'm sure it fits other years.
Bot
turbosquid
$19

Bot
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Bot
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

scanner bot
...scanner bot
3dexport
cool scanner bot who scans for fixing things...
3d_ocean
$9

Apc Bot
...n bot games toys
an all-purpose-constructo-bot. for cartoon purposes. the model is not rigged. please use vray adv for rendering.
3d_export
$75

Bot 3D Model
...bot 3d model
3dexport
robot bot man kiborg character
bot 3d model evgen 19504 3dexport
turbosquid
free

Eye Bot
...eye bot
turbosquid
free 3d model eye bot for download as fbx on turbosquid: 3d models for games, architecture, videos. (1514059)
turbosquid
$29

Gorill-bot
...bosquid
royalty free 3d model gorill-bot for download as fbx on turbosquid: 3d models for games, architecture, videos. (1239456)
turbosquid
$25

Lamp Bot
...bosquid
royalty free 3d model lamp bot for download as blend on turbosquid: 3d models for games, architecture, videos. (1230121)
turbosquid
$10

Spectre Bot
...osquid
royalty free 3d model spectre bot for download as fbx on turbosquid: 3d models for games, architecture, videos. (1616378)
turbosquid
$8

Ultra Bot
...urbosquid
royalty free 3d model ultra bot for download as ma on turbosquid: 3d models for games, architecture, videos. (1330752)
Drive
turbosquid
$90
Drive
...turbosquid
royalty free 3d model drive for download as blend on turbosquid: 3d models for games, architecture, videos. (1654393)
3d_export
$10

cycloidal drive
...cycloidal drive
3dexport
cycloidal drive
3d_ocean
$5

Flash Drive
...h drive included : – materials – scene ( lighs / room ) – .c4d + .obj for any questions please feel free to contact me thank you.
3d_ocean
$5

Usb drive
...s shaders and a lighting setup. it also has a small animation of it going in and out. i saved it out as both a .blend file and...
3d_ocean
$5

Pen Drive
...est computer drive game model good low poly new pen pen drive textured unwrapped uv very low poly
a very beautiful low poly model
3d_ocean
$10

External hard drive
... is a detailed model of a trekstor external hard drive. you can easily modify the label on the top. simply edit the text objects.
turbosquid
$60

Star Drive
...squid
royalty free 3d model star drive for download as blend on turbosquid: 3d models for games, architecture, videos. (1254314)
turbosquid
$50

Star Drive
...squid
royalty free 3d model star drive for download as blend on turbosquid: 3d models for games, architecture, videos. (1263524)
turbosquid
$45
Star Drive
...squid
royalty free 3d model star drive for download as blend on turbosquid: 3d models for games, architecture, videos. (1287060)
turbosquid
$40

Star Drive
...squid
royalty free 3d model star drive for download as blend on turbosquid: 3d models for games, architecture, videos. (1261902)
Tri
design_connected
$11

Tri
...tri
designconnected
iform tri computer generated 3d model. designed by karpf, peter.
design_connected
$16

Tris
...esignconnected
photo-realistic 3d models of the tris table from flexform for 3d architectural and interior design presentations.
3ddd
$1

Tris by Flexform
...tris by flexform
3ddd
flexform , круглый
tris by flexform
design_connected
$13

Tri-p
...tri-p
designconnected
foscarini tri-p computer generated 3d model. designed by diesel creative team.
design_connected
$16

Tris Rug
...tris rug
designconnected
ligne roset tris rug computer generated 3d model. designed by amandine chhor & aissa logerot.
turbosquid
$2

Tri-Flower
...bosquid
royalty free 3d model tri-flower for download as stl on turbosquid: 3d models for games, architecture, videos. (1682410)
turbosquid
$2

tri cycle
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
free

Poltrona Frau / Tri
...poltrona frau / tri
3ddd
poltrona frau
poltrona frau / tri
3ddd
$1

Tri-3 Tables
...tri-3 tables
3ddd
журнальный , кофейный
tri-3 glass tables collection
3ddd
free

Sonya Rugs / Tri Angles
... ковер
ковёр tri angles от sonya winner studiohttp://www.sonyawinner.com/tri-angles