Thingiverse
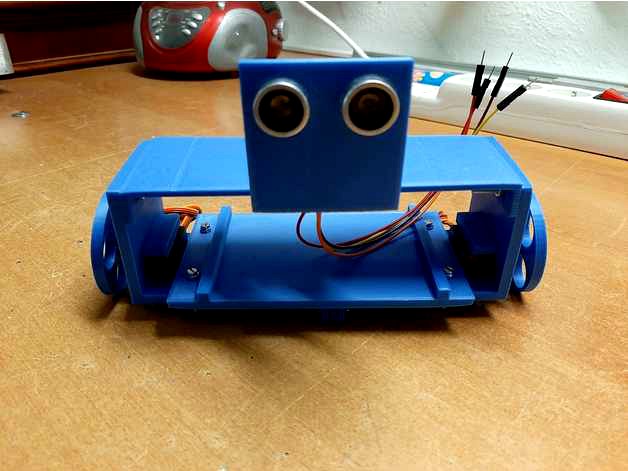
Arduino Robot Avoid Obstacles by Paolo_Buono
by Thingiverse
Last crawled date: 4 years, 8 months ago
Materials
nr. 2 micro servi - rotation 360°
nr. 1 sensor HC-SR04
nr. 1 Arduino Uno
nr. 1 Battery 9 volt
Arduino Code:
"#include"
const int triggerPort = 11;
const int echoPort = 12;
Servo servoLeft;
Servo servoRight;
void setup(){
pinMode(triggerPort, OUTPUT);
pinMode(echoPort, INPUT);
servoLeft.attach(9);
servoLeft.write(90);
servoRight.attach(10);
servoRight.write(90);
Serial.begin(9600);
}
void loop(){
long distance = CalculateDistance();
if (distance < 15) {
Stop();
ChooseDirection();
Stop();
}
else {
Go();
}
//delay(1000);
}
long CalculateDistance(){
Serial.println("CalculateDistance");
digitalWrite( triggerPort, LOW );
digitalWrite( triggerPort, HIGH );
delayMicroseconds(10);
digitalWrite( triggerPort, LOW );
long time = pulseIn( echoPort, HIGH );
long distance = 0.034 * time / 2;
return distance;
}
void Go(){
Serial.println("Go");
servoLeft.write(120);
servoRight.write(60);
}
void Stop(){
Serial.println("Stop");
servoLeft.write(90);
servoRight.write(90);
delay(2000);
}
void ChooseDirection(){
Serial.println("ChooseDirection");
int randomChoose = random(1, 4);
switch (randomChoose) {
case 1:
Serial.println("Right 2sec");
servoLeft.write(90);
servoRight.write(120);
delay(2000);
break;
case 2:
Serial.println("Left 2sec");
servoLeft.write(60);
servoRight.write(90);
delay(2000);
break;
case 3:
Serial.println("Right 4sec");
servoLeft.write(90);
servoRight.write(120);
delay(4000);
case 4:
Serial.println("Left 4sec");
servoLeft.write(60);
servoRight.write(90);
delay(4000);
break;
}
}
nr. 2 micro servi - rotation 360°
nr. 1 sensor HC-SR04
nr. 1 Arduino Uno
nr. 1 Battery 9 volt
Arduino Code:
"#include"
const int triggerPort = 11;
const int echoPort = 12;
Servo servoLeft;
Servo servoRight;
void setup(){
pinMode(triggerPort, OUTPUT);
pinMode(echoPort, INPUT);
servoLeft.attach(9);
servoLeft.write(90);
servoRight.attach(10);
servoRight.write(90);
Serial.begin(9600);
}
void loop(){
long distance = CalculateDistance();
if (distance < 15) {
Stop();
ChooseDirection();
Stop();
}
else {
Go();
}
//delay(1000);
}
long CalculateDistance(){
Serial.println("CalculateDistance");
digitalWrite( triggerPort, LOW );
digitalWrite( triggerPort, HIGH );
delayMicroseconds(10);
digitalWrite( triggerPort, LOW );
long time = pulseIn( echoPort, HIGH );
long distance = 0.034 * time / 2;
return distance;
}
void Go(){
Serial.println("Go");
servoLeft.write(120);
servoRight.write(60);
}
void Stop(){
Serial.println("Stop");
servoLeft.write(90);
servoRight.write(90);
delay(2000);
}
void ChooseDirection(){
Serial.println("ChooseDirection");
int randomChoose = random(1, 4);
switch (randomChoose) {
case 1:
Serial.println("Right 2sec");
servoLeft.write(90);
servoRight.write(120);
delay(2000);
break;
case 2:
Serial.println("Left 2sec");
servoLeft.write(60);
servoRight.write(90);
delay(2000);
break;
case 3:
Serial.println("Right 4sec");
servoLeft.write(90);
servoRight.write(120);
delay(4000);
case 4:
Serial.println("Left 4sec");
servoLeft.write(60);
servoRight.write(90);
delay(4000);
break;
}
}