Thingiverse
AnfiBot 0.0 by Xarpe
by Thingiverse
Last crawled date: 3 years ago
Dentro de la actividad de introducción a la robótica de la asociación Asperga se animó a los alumnos a desarrollar un proyecto a largo plazo, más allá de los simples robots que esquivan obstáculos o siguen o escapan de la luz. Así que decidieron hacer un robot teledirigido que sea capaz de tomar datos y muestras en aguas someras.
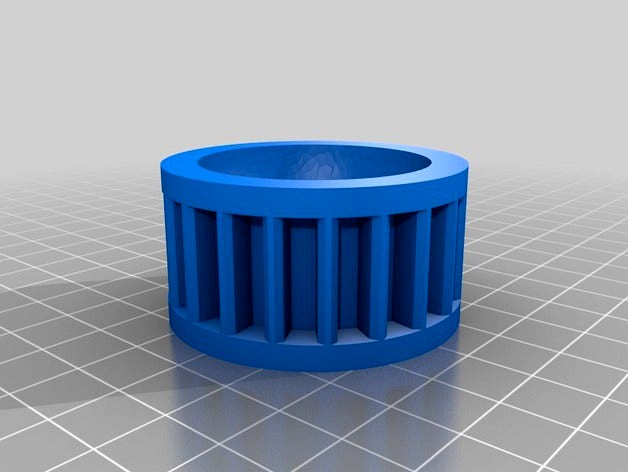
Esto es solo la estructura de soporte de los motores y la cadena oruga.
La métrica utilizada es M5 para unir el lado derecho con el izquierdo y M3 para fijar en cada lado la tensión de las orugas.
Enlace a la oruga utilizada. En agua salada precisaron un mantenimiento posterior.https://es.aliexpress.com/store/product/TT-Motor-Smart-Car-Robot-Gear-Motor-for-Arduino-Free-Shipping/1805090_32529098435.html?spm=a219c.12010108.1000016.1.nk9LOS&isOrigTitle=true
Enlace a los motores usados, que se mostraron insuficientes para superar zonas con algas y que dan poca propulsión en agua. Se le añadirá un motor con hélice fuera borda para controlarlo en el agua y usar como ayuda donde se vea necesario.
https://es.aliexpress.com/item/plastic-Caterpillar-Chain-Track-Pedrail-Thread-tracker-Wheel-for-Tank-Crawler-Chassis-DIY-RC-Toy-remote/2050350319.html?spm=a219c.10010108.1000016.1.XeSWQ6&isOrigTitle=true
La flotabilidad la da una caja de gominolas.
Las piezas 00, 01 y 06 se imprimen dos veces para poder crear el lateral derecho del robot.
Las primeras pruebas de campo han mostrado problemas de estabilidad entre la rueda dentada y el eje del motor. Se debe ubicar la caja de gominolas a mayor altura para evitar que esta frene el avance ante piedras y arena blanda.
Códigohttps://github.com/XarpeSerpe/AnfiBot/tree/master
Esto es solo la estructura de soporte de los motores y la cadena oruga.
La métrica utilizada es M5 para unir el lado derecho con el izquierdo y M3 para fijar en cada lado la tensión de las orugas.
Enlace a la oruga utilizada. En agua salada precisaron un mantenimiento posterior.https://es.aliexpress.com/store/product/TT-Motor-Smart-Car-Robot-Gear-Motor-for-Arduino-Free-Shipping/1805090_32529098435.html?spm=a219c.12010108.1000016.1.nk9LOS&isOrigTitle=true
Enlace a los motores usados, que se mostraron insuficientes para superar zonas con algas y que dan poca propulsión en agua. Se le añadirá un motor con hélice fuera borda para controlarlo en el agua y usar como ayuda donde se vea necesario.
https://es.aliexpress.com/item/plastic-Caterpillar-Chain-Track-Pedrail-Thread-tracker-Wheel-for-Tank-Crawler-Chassis-DIY-RC-Toy-remote/2050350319.html?spm=a219c.10010108.1000016.1.XeSWQ6&isOrigTitle=true
La flotabilidad la da una caja de gominolas.
Las piezas 00, 01 y 06 se imprimen dos veces para poder crear el lateral derecho del robot.
Las primeras pruebas de campo han mostrado problemas de estabilidad entre la rueda dentada y el eje del motor. Se debe ubicar la caja de gominolas a mayor altura para evitar que esta frene el avance ante piedras y arena blanda.
Códigohttps://github.com/XarpeSerpe/AnfiBot/tree/master
Similar models
thingiverse
free

ADAPTADOR SPANNERHANDS Spool System PARA HIGROMETRO by Mkoki
...gujero en la tapa superior de la caja y de paso tapa los agujeros que hay para poner la placa,o usarlos para sujetar el adaptador
thingiverse
free

Hormiguero by Barkalez
...lo limpio.
con ésta idea podremos tener un hormiguero perfecto para las exigencias de nuestras hormigas y nunca falta de humedad.
3dwarehouse
free
![(SKETCHY PHYSICS2.0)]Oruga](/t/7423650.jpg)
(SKETCHY PHYSICS2.0)]Oruga
...inta! espero que les guste! para un buen funcionamiento configuren la gravedad en 2.0 set the gravity in 2.0 for a good operation
thingiverse
free

Tapón led con carga solar para botella de agua mineral by Jeanbeat
...0s.9042311.0.0.274263c0nuzdjf
cadena de led: https://es.aliexpress.com/item/32889198672.html?spm=a2g0s.9042311.0.0.274263c0qluqx8
3dwarehouse
free

Montaje del teclado y los motores del robot
...conexiones entre el teclado y la placa de pruebas del arduino nano así como también las conexiones con los drivers y los motores.
thingiverse
free

Caja perforada con tapa (perforated box) by Quiquin
... borde que hace de fijación con la tapa) se puede imprimir en un segundo proceso con altura de capa 0.2mm para un encastre mejor.
thingiverse
free

Spot Welder (Soldadura por puntos) by fernandoxx
...62.html?spm=a2g0s.9042311.0.0.kagmpmhttps://es.aliexpress.com/item/smd-fuse-2a-2012/32807721916.html?spm=a2g0s.9042311.0.0.scdydn
thingiverse
free

Tanque oruga mini by Ciber_luis
.../www.electan.com/feetech-fs90r-micro-continuous-rotation-servo-p-6173.html
un video de funcionamientohttps://youtu.be/y36uuw7gmyy
3dwarehouse
free

Modelo Agroecologico 3D
...ado sin ningún tipo de tratamiento que perjudique los cultivos ni a las personas que también pueden usar el agua para su consumo.
3dwarehouse
free

Venus de Talará
...zona del pubis. el brazo derecho se conserva, auque no está reintegrado en la escultura #busto #escultura #estatua #lecrin #venus
Xarpe
thingiverse
free

Tope carril friegaplatos by Xarpe
...tope carril friegaplatos by xarpe
thingiverse
tope carril friegaplatos
thingiverse
free

Escudo del Cadiz Club de Futbol by Xarpe
...escudo del cadiz club de futbol by xarpe
thingiverse
escudo del cadiz club de futbol.
thingiverse
free

Holder Arduino Uno for Ibotz Antoid by Xarpe
... ibotz antoid by xarpe
thingiverse
ibotz holders for arduino uno, hc-sr04 ultrasonic sensor and hg7881two channel motor driver.
thingiverse
free

Symbol of the Jediism Church by Xarpe
...your side because you are here.
now it truly is your time to become the force!
daniel morgan jones and the church of jediism team
0
turbosquid
$12

Calligraphic Digit 0 Number 0
...hic digit 0 number 0 for download as max, obj, fbx, and blend on turbosquid: 3d models for games, architecture, videos. (1389318)
3d_export
$6

set-0
...set-0
3dexport
turbosquid
$6

hedge 0
...yalty free 3d model hedge 0 for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1450353)
turbosquid
$5

Nuber 0
...oyalty free 3d model nuber 0 for download as ma, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1564674)
turbosquid
$22

0.jpg
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Steam Locomotive Fowler 4F 0-6-0
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10
Liquid Number 0
... model liquid number 0 for download as c4d, 3ds, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1689919)
turbosquid
$45

Dragon360_perspShape_tmp.0.jpg
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$8

Rocks Debris 0
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$18

wood-guardrail-fence 0
...wood-guardrail-fence 0
3dexport
wood-guardrail-fence 0<br>3ds max 2015