GrabCAD

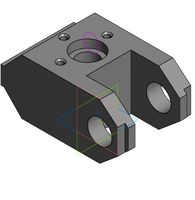
Amarok Triple Clamp
by GrabCAD
Last crawled date: 1 year, 10 months ago
A quick and simple triple clamp. More aggressive lightening could be done quite easily. Best of luck with the P1 this racing season!
Mass properties of Amarok Triple Clamp ( Part Configuration - Default )
Output coordinate System: -- default --
Density = 0.00 grams per cubic millimeter
Mass = 870.50 grams
Volume = 322407.70 cubic millimeters
Surface area = 108819.22 square millimeters
Center of mass: ( millimeters )
X = 0.53
Y = 23.31
Z = -22.05
Principal axes of inertia and principal moments of inertia: ( grams * square millimeters )
Taken at the center of mass.
Ix = (1.00, -0.00, -0.00) Px = 767999.79
Iy = (-0.00, -0.12, -0.99) Py = 5869968.45
Iz = (0.00, 0.99, -0.12) Pz = 6366434.29
Moments of inertia: ( grams * square millimeters )
Taken at the center of mass and aligned with the output coordinate system.
Lxx = 768004.96 Lxy = -5363.41 Lxz = -319.43
Lyx = -5363.41 Lyy = 6358980.05 Lyz = 60355.38
Lzx = -319.43 Lzy = 60355.38 Lzz = 5877417.51
Moments of inertia: ( grams * square millimeters )
Taken at the output coordinate system.
Ixx = 1664236.34 Ixy = 5473.71 Ixz = -10569.76
Iyx = 5473.71 Iyy = 6782423.98 Iyz = -387066.86
Izx = -10569.76 Izy = -387066.86 Izz = 6350701.5
Mass properties of Amarok Triple Clamp ( Part Configuration - Default )
Output coordinate System: -- default --
Density = 0.00 grams per cubic millimeter
Mass = 870.50 grams
Volume = 322407.70 cubic millimeters
Surface area = 108819.22 square millimeters
Center of mass: ( millimeters )
X = 0.53
Y = 23.31
Z = -22.05
Principal axes of inertia and principal moments of inertia: ( grams * square millimeters )
Taken at the center of mass.
Ix = (1.00, -0.00, -0.00) Px = 767999.79
Iy = (-0.00, -0.12, -0.99) Py = 5869968.45
Iz = (0.00, 0.99, -0.12) Pz = 6366434.29
Moments of inertia: ( grams * square millimeters )
Taken at the center of mass and aligned with the output coordinate system.
Lxx = 768004.96 Lxy = -5363.41 Lxz = -319.43
Lyx = -5363.41 Lyy = 6358980.05 Lyz = 60355.38
Lzx = -319.43 Lzy = 60355.38 Lzz = 5877417.51
Moments of inertia: ( grams * square millimeters )
Taken at the output coordinate system.
Ixx = 1664236.34 Ixy = 5473.71 Ixz = -10569.76
Iyx = 5473.71 Iyy = 6782423.98 Iyz = -387066.86
Izx = -10569.76 Izy = -387066.86 Izz = 6350701.5
Similar models
cg_trader
free

SolidWorks Weldments Steel Structure 500mm X 200
...zx = 68815636.79 izy = 1317147.44 izz = 12689050.32 steel design architecture outdoors solidworks industrial part industrial part
grabcad
free

minimalist monitor stand
...nate system.
ixx = 204.98 ixy = -91.27 ixz = 260.87
iyx = -91.27 iyy = 819.23 iyz = -55.93
izx = 260.87 izy = -55.93 izz = 660.56
grabcad
free

NASA RASSOR Challenge
...te system.
ixx = 144889.64 ixy = 0.27 ixz = -0.17
iyx = 0.27 iyy = 144890.14 iyz = 0.38
izx = -0.17 izy = 0.38 izz = 140742.46
grabcad
free

NASA RASSOR CHALLENGE
...z = 168866777.64
iyx = 83478446.22 iyy = 382332555.73 iyz = 87953138.21
izx = 168866777.64 izy = 87953138.21 izz = 268121757.63
grabcad
free

FUNNEL
...07 cubic millimeters
surface area = 36436.49 square millimeters
center of mass: ( millimeters )
x = 0.00
y = 56.71
z = 0.00
grabcad
free

NASA Handrail Clamp
...utput coordinate system.
ixx = 24.02 ixy = 9.53 = 0.47 ixz
iyy i and x = 9.53 = 1.39 = 6.07 iyz
izy izx = 0.47 = 1.39 izz = 29.27
grabcad
free

crankshaft
...cubic millimeters
surface area = 348274.99 square millimeters
center of mass: ( millimeters )
x = 0.22
y = 0.00
z = -206.33
grabcad
free

cable clamps klem kabel
...55 cubic millimeters
surface area = 1912.70 square millimeters
center of mass: ( millimeters )
x = -6.09
y = 12.60
z = 6.00
grabcad
free
![[Oil & Gas Storage Tank] API-Based-Design](/t/5152939.jpg)
[Oil & Gas Storage Tank] API-Based-Design
...6.08e+005 ixy = -91 ixz = 1.67e+005
iyx = -91 iyy = 5.03e+006 iyz = -6.99e+003
izx = 1.67e+005 izy = -6.99e+003 izz = 4.67e+006
grabcad
free

wrench
... square millimeters
center of mass: ( millimeters )
x = 84.24
y = 0.44
z = 0.00
go to the video for a step-by-step creation.
Amarok
3d_export
$99

Volkswagen Amarok 2011 3D Model
...gen vw amarok 2010 2011 2012 2013 concept pickup 4x4 offroad utility germany
volkswagen amarok 2011 3d model squir 20888 3dexport
cg_studio
$99

Volkswagen Amarok 20113d model
....3ds .fbx .lwo .max .obj .xsi - volkswagen amarok 2011 3d model, royalty free license available, instant download after purchase.
cg_studio
$99

VW Amarok SAR3d model
...del
cgstudio
.3ds .fbx .lwo .max .obj - vw amarok sar 3d model, royalty free license available, instant download after purchase.
cg_studio
$79

VW Amarok 20113d model
...el
cgstudio
.3ds .fbx .lwo .max .obj - vw amarok 2011 3d model, royalty free license available, instant download after purchase.
3d_export
$99

VW Amarok SAR 3D Model
...h lifeguard beach watch 4x4 awd offroad off road all terrain vehicle car pickup
vw amarok sar 3d model fisherman3d 37759 3dexport
3d_export
$89

VW Amarok 2011 3D Model
...-up awd 4x4 tdi tsi 4wd ligt truck car vehicle off-road offroad german germany
vw amarok 2011 3d model fisherman3d 37710 3dexport
3d_ocean
$89

Volkswagen Amarok SingleCab 2010
...y, in real units of measurement, qualitatively and maximally close to the original. model formats: - *.max (3ds max 2008 scanl...
3d_ocean
$89

Volkswagen Amarok CrewCab 2011
...b version from launch with a single cab model to follow in 2011, combines the robustness of a pick-up with innovative technolo...
turbosquid
$39

Volkswagen Amarok 2020 wheel
...eel for download as c4d, ma, lwo, max, xsi, 3ds, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1685940)
3d_export
$99

Volkswagen Amarok SingleCab 2010 3D Model
... pickup truck commercial 2-door german off-road four-wheel 4x4
volkswagen amarok singlecab 2010 3d model humster3d 50444 3dexport
Triple
turbosquid
$10

Triple angle michael triple
...free 3d model triple angle michael triple for download as max on turbosquid: 3d models for games, architecture, videos. (1243156)
3d_export
$5

triple knob
...triple knob
3dexport
triple knob
3ddd
$1

flora triple
...flora triple
3ddd
slamp
подвес flora triple
3ddd
$1

Triple P!
...iple p!
3ddd
горшок , цветок , листья
triple p!
design_connected
$16

To triple sofa
...to triple sofa
designconnected
nurus to triple sofa computer generated 3d model. designed by ozelgin, tanju.
3d_export
$5

Triple bars
...triple bars
3dexport
these are triple bars for outdoor training/gymnastics. suitable for push-ups on uneven bars
turbosquid
$10

Triple Window
...quid
royalty free 3d model triple window for download as 3ds on turbosquid: 3d models for games, architecture, videos. (1484877)
turbosquid
$5

Triple copper
...free 3d model triple copper for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1317753)
turbosquid
$3

TRIPLE SWITCH
...free 3d model triple switch for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1369504)
turbosquid
$3

Triple bench
...d model triple bench for download as sldpr, ige, stl, and obj on turbosquid: 3d models for games, architecture, videos. (1560286)
Clamp
3d_export
$11

clamp
...clamp
3dexport
clamp
3ddd
free

Clamp
... enricо zanolla , капитоне
дизайнерenrico zanollмодель clamp
3ddd
$1

Clamp
...ricо zanolla , капитоне
дизайнеры
enrico zanolla
andrea di filippo
модель clamp
dzstudio
3d_export
free

clamp
...clamp
3dexport
simple clamp model, more free 3d models here:
3d_export
$5

clamping handle
...clamping handle
3dexport
clamping handle
3ddd
$1
Clamp / DZstudio
... dzstudio , капитоне
люстра clamp от dzstudio/enrico zanolla(италия).
3ddd
$1

Светильник Clamp
...светильник clamp
3ddd
clamp
стеганый светильник clamp в двух цветах в черном и белом.
turbosquid
$29
clamp
...ty free 3d model clamp for download as 3ds, obj, c4d, and fbx on turbosquid: 3d models for games, architecture, videos. (1442049)
turbosquid
$29

clamp
...ty free 3d model clamp for download as 3ds, obj, c4d, and fbx on turbosquid: 3d models for games, architecture, videos. (1442041)
3d_export
$5
Clamp-14
...clamp-14
3dexport
3d model of clamp name 14