Thingiverse
uStepper Robot Arm Wrist Joints by phiatt
by Thingiverse
Last crawled date: 3 years ago
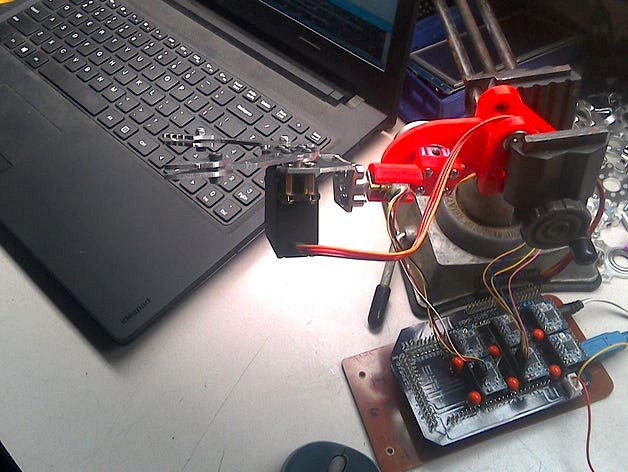
I like the design of the uStepper Robotic Arm so much I have started to build one. Unfortunately for my preference, it has limited wrist movement.
I use a 28BYJ-48 12V stepper for the angular wrist movement and a micro geared stepper for the rotational movement..
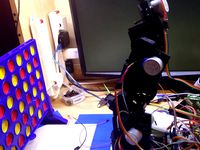
This is only a prototype for now, basically proof of concept. The only down side is the 28BYJ stepper looses position when the power is removed. I am going to look into using some type of gear reduction for the angular movement and some how reduce the mass of the end-effector
This 28BYJ stepper or similar:
http://www.ebay.com/itm/28BYJ-48-Valve-Gear-Stepper-Motor-DC-12V-4-Phase-Step-Motor-Reduction-Arduino-/172294403078?hash=item281d8bf406:g:q0kAAOSwdzVXowG~
And this micro geared stepper:
http://www.dx.com/p/15mm-2-phase-4-line-micro-15by-dc-5v-stepper-gear-box-motor-355421#.V_CnF-ArK00
The hub adapters are from servocity.com
5mm & 3mm
https://www.servocity.com/770-set-screw-hubs
Now remember, this is a prototype and/or a work in progress, any suggestions will be considered and appreciated.
I use a 28BYJ-48 12V stepper for the angular wrist movement and a micro geared stepper for the rotational movement..
This is only a prototype for now, basically proof of concept. The only down side is the 28BYJ stepper looses position when the power is removed. I am going to look into using some type of gear reduction for the angular movement and some how reduce the mass of the end-effector
This 28BYJ stepper or similar:
http://www.ebay.com/itm/28BYJ-48-Valve-Gear-Stepper-Motor-DC-12V-4-Phase-Step-Motor-Reduction-Arduino-/172294403078?hash=item281d8bf406:g:q0kAAOSwdzVXowG~
And this micro geared stepper:
http://www.dx.com/p/15mm-2-phase-4-line-micro-15by-dc-5v-stepper-gear-box-motor-355421#.V_CnF-ArK00
The hub adapters are from servocity.com
5mm & 3mm
https://www.servocity.com/770-set-screw-hubs
Now remember, this is a prototype and/or a work in progress, any suggestions will be considered and appreciated.
Similar models
grabcad
free

28BYJ-48 Stepper motor
...28byj-48 stepper motor
grabcad
28byj-48 stepper motor with 5:1 gear 12v
grabcad
free

Stepper Motor
...stepper motor
grabcad
stepper motor dc 5v 4 phase
sourced from ebay. part number 28byj-48
grabcad
free

12V Geared Stepper Full Metal Gear Reduction
...s-dc-12v-2-phase-4-wire-stepper-motor-full-metal-reduction-gear-box-dc-motor-/351878660336?hash=item51ed9a40f0:g:dfqaaosw-cpyax9h
thingiverse
free

Model stepper 28BYJ-48 by siderits
...r with uln2003 driver board (without driver board.
used in modeling enclosures.
included an indicator for this stepper motor.
thingiverse
free

28BYJ-48 5V Stepper Motor Housing and Bracket by robotonics
...ing and bracket by robotonics
thingiverse
housing and bracket for 28byj-48 5v dc stepper motor to be used to add to robot frame.
grabcad
free

28BYJ-48 12V
...28byj-48 12v
grabcad
28byj-48 12v stepper motor
thingiverse
free

Roaming Robot by lynce9956
...5v dc 4-phase 5-wire + uln2003 driver board
range finder: hc-sr04
microcontroller: arduino uno
https://youtu.be/n5mby3c59hc
grabcad
free

Stepper motor 28BYJ-48 5VDC
...stepper motor 28byj-48 5vdc
grabcad
4 phases stepper motor,
shaft d5mm, 5vdc.
grabcad
free

Stepper motor 28BYJ-48
...stepper motor 28byj-48
grabcad
tiny stepper motor (28byj-48) with gears
thingiverse
free
Robotic Arm 28BYJ-48 by dmclark
.../youtu.be/kyrb0abdwichttps://youtu.be/oylz2islxoihttps://youtu.be/t3hfwljj1bo
githubhttps://github.com/clarkdm/group-12-connect-4
Phiatt
thingiverse
free

Filament Guide by phiatt
...ment due to the fact that i plan to mount the filament spool outside of the enclosure. nothing fancy, print it however you want.
thingiverse
free

Stratux holder by phiatt
...ns for the micro-usb on the side.
the design file for 123d is available also for those who wish to modify it to suit their needs.
thingiverse
free

Solder spool organizer by phiatt
...accessible, instead of on the self 4 feet above my head. i used a 1/2" (13 mm) dowel rod, #4 screws, flush head to mount it.
thingiverse
free

Fishing Rod Holder/Rack Small Base with fillets by phiatt
...phiatt
thingiverse
this is not a remix, but a redesign.
https://www.thingiverse.com/thing:1667166
base for the small rod holder.
thingiverse
free

Intercom Pocket by phiatt
... one at as.
https://www.aircraftspruce.com/catalog/avpages/pa200ik.php
i will upload pics of the install as soon as i install it.
thingiverse
free

4D Systems BeagleBoneBlack LCD Cape Stand by phiatt
... is a set of stands or legs for the beaglebone black 4d sytems lcd cape. something simple to hold up the lcd for better viewing.
thingiverse
free

Bowfishing arrow parts by phiatt
...orks, stay tuned.
p.s. the stop tends to bust, probably not a good idea to use them.
safety slide and stop for bowfishing arrow.
thingiverse
free

Bowfishing Arrow Safety slide, new version by phiatt
...lide; print one to start and make sure it fits your arrow; my first one had to be scaled up 0.1% so it would slide over the nock.
thingiverse
free

Stratux / Battery combo holder by phiatt
...05
and this battery:
https://www.amazon.com/gp/product/b00fdk2g2c/ref=ox_sc_act_title_4?ie=utf8&psc=1&smid=a1hg0sd62rre2i
thingiverse
free

Hummingbird Piranha Max 4 Fish Finder Cover by phiatt
... may be to tall for some printers.
i printed it on my duplicator i3 by reducing the z scale so its 160 mm tall instead of 175 mm.
Ustepper
thingiverse
free

uStepper cover by Petr_Novacek
...ustepper cover by petr_novacek
thingiverse
ustepper alternative cover
thingiverse
free

uStepper Cover by nic6911
...es two magnets.
see a gif of it in action here:http://www.ustepper.com/lidclosed.gif
for more info visit: http://www.ustepper.com
thingiverse
free

uStepper Linear Actuator
...ew/46-kit_type-complete_kit
videos of both in action also available here:https://youtu.be/wa8sdel2xgghttps://youtu.be/sgkufqm8x9g
thingiverse
free

uStepper Robot Arm Motor Gears by nic6911
... stl files are found on our github: https://github.com/ustepper/ustepper-robotarm-rev3
use m3x16mm bolts for tightening the gear.
thingiverse
free

uStepper Nema23 bracket by nic6911
...th regards to the feedback algorithm, making it possible to use also on larger machines.
or visit www.ustepper.com for more info.
thingiverse
free

uStepper Robot Arm Rev. 3 by nic6911
...s a kit on http://www.ustepper.com/shop
new video showing a bit more about the arm and how to use it:https://youtu.be/njvthddd_ye
thingiverse
free

uStepper cover - fan module by Petr_Novacek
...ustepper cover - fan module by petr_novacek
thingiverse
designed for http://www.thingiverse.com/thing:2287481
thingiverse
free

uStepper Nema34 Bracket by nic6911
...re should also be a center hole with a diameter of 17 mm and a depth of approximately 6 mm.
visit www.ustepper.com for more info.
thingiverse
free

uStepper Robot Arm rev. 2 - Obsolete (See summary) by nic6911
... arm design (http://www.thingiverse.com/thing:986224).
visit www.ustepper.com to read more about the controller used for the arm.
thingiverse
free

uStepper linear actuator by nic6911
...5 threaded rod
2 x m5 washers (if needed between bearings and gear)
a short video can be found here: https://youtu.be/lf4iwxsxzng
Wrist
3d_export
$5

wrist watch
...wrist watch
3dexport
wrist watch
3d_export
$10

robot wrist
...robot wrist
3dexport
anthropomorphic robot wrist
3d_export
$5

Wrist watch
...wrist watch
3dexport
wrist watch or hand watch
archibase_planet
free

Wrist watch
...wrist watch
archibase planet
wrist watch watch
wrist watch orient s n250412 - 3d model (*.3ds) for interior 3d visualization.
3d_export
$5

wrist rotation handle
...wrist rotation handle
3dexport
wrist rotation handle
3d_ocean
$18

Wrist Watch
...and is fully unwrapped. the base mesh is 127.812 triangles and 683.740 triangles once turbosmooth is applied on all different ...
turbosquid
$30

wrist watch
...bosquid
royalty free 3d model wrist watch for download as ma on turbosquid: 3d models for games, architecture, videos. (1516675)
turbosquid
$19

Wrist Watch
...osquid
royalty free 3d model wrist watch for download as c4d on turbosquid: 3d models for games, architecture, videos. (1228329)
turbosquid
$1

Wrist Watch
...osquid
royalty free 3d model wrist watch for download as max on turbosquid: 3d models for games, architecture, videos. (1270832)
turbosquid
free

Wrist watch
...osquid
royalty free 3d model wrist watch for download as obj on turbosquid: 3d models for games, architecture, videos. (1429859)
Joints
turbosquid
$5

Joint
...turbosquid
royalty free 3d model joint for download as blend on turbosquid: 3d models for games, architecture, videos. (1179882)
3d_export
$5
joint handle
...joint handle
3dexport
joint handle
3d_export
$5
knuckle joint
...knuckle joint
3dexport
this is a 3d model of knuckle joint
3d_export
$5

Knuckle Joint
...knuckle joint
3dexport
industry use knuckle joint
3ddd
$1

PENTA Joint
...penta joint
3ddd
penta
http://www.lampcommerce.com/en/catalogue/brands/penta-light/joint-floor-lamp
turbosquid
$49

Joint | Project
...squid
royalty free 3d model joint | project for download as on turbosquid: 3d models for games, architecture, videos. (1297983)
turbosquid
$10

universal joint
...squid
royalty free 3d model univresal joint for download as on turbosquid: 3d models for games, architecture, videos. (1309400)
turbosquid
$15

Joint Ashtray
...squid
royalty free 3d model joint ashtray for download as ma on turbosquid: 3d models for games, architecture, videos. (1199702)
turbosquid
$5

Unrolled joint
...e 3d model unrolled joint for download as blend, obj, and stl on turbosquid: 3d models for games, architecture, videos. (1577889)
3d_export
$5

Cardan Joint 3D Model
...cardan joint 3d model
3dexport
cardan joint
cardan joint 3d model fau 71171 3dexport
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Arm
archibase_planet
free

Arm
...ase planet
arm hand right hand skeleton
arm human skeleton right arm n030515 - 3d model (*.gsm+*.3ds+*.max) for 3d visualization.
3ddd
$1

arm chair
...arm chair
3ddd
arm chair , пуф
arm chair
turbosquid
$5

arm
...arm
turbosquid
royalty free 3d model arm for download as obj on turbosquid: 3d models for games, architecture, videos. (1306158)
turbosquid
free

Arm
...arm
turbosquid
free 3d model arm for download as obj and fbx on turbosquid: 3d models for games, architecture, videos. (1346955)
turbosquid
$29

Arm
...osquid
royalty free 3d model arm for download as obj and fbx on turbosquid: 3d models for games, architecture, videos. (1382436)
3d_export
$5

coat of arms
...coat of arms
3dexport
coat of arms
3ddd
$1

ARM SOFA
...arm sofa
3ddd
arm sofa
3ddd
$1

Arm chair
...arm chair
3ddd
arm chair
3ddd
$1

Arm chair
...arm chair
3ddd
угловое
arm chair
3ddd
$1
ARM CHAIR
...arm chair
3ddd
arm chair clothes