Thingiverse
Turret Joint by RobertLRead
by Thingiverse
Last crawled date: 3 years ago
Note: After building this, I learned that it was essentially invented in 1999 as expressed in this patent by Se-Kyong Song, Dong-Soo Kwon, Wan Soo Kim. This joint should really be called the "Song Kwon Kim" or SKK joint in honor of them. However, "turret-joint" better captures what it actually is shaped like. Their patent has since lapsed, so you need not worry about patent infringement.
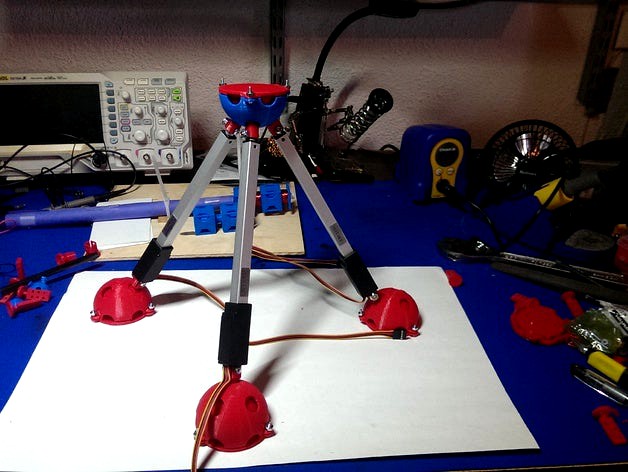
This is a new kind of joint which allows multiple members to come together at a single point with some flexibility in their angles. This allows us to make a strong joint for implementing irregular space frames or robots constructed from linear actuators.
NOTE: My initial testing with moving actuators suggests that although the joint works, it is quite "frictiony" when printed on the Fast setting on a Replicator 2---which makes sense because it is visibly striped and rough. However, to be an EFFECTIVE mechanical joint, we may have to increase the resolution of the print, or even provide lubrication. I'm trying to test thoroughly before I take that step however. The current joint should be considered a initial design and a work in progress, not a finished product.
You may want to watch my YouTube video explaining this.
... or my video showing the large robot in action:
This is a collection of things which work together to form a construction system for building spaceframes, or moving robots, that allow some angular displacement in the members, without sacrificing strength or structural integrity.
The fundamental innovation here is that the rotors can move, up to about 30 degrees, without loosing any structural strength, because they are always pointed precisely at the center of the joint. Up to manufacturing tolerances, the joint does not introduce an "slop" or new degrees of freedom in the central point when bringing members together. This allows us to make trusses and spaceframes that are curved or wavy or in other ways deviate from purely equilateral triangles, without having to create a new joint for each angular displacement.
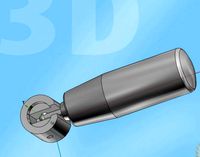
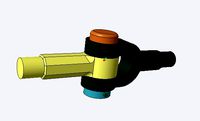
This system has a number of pieces. The fundamental parts are the ball, the lock, and rotors. The lock holds the rotor against the ball and ensures it always is pointed at the center of the joint (which is the center of the ball.)
Separate parts include separate caps that can be screwed to the locks to produce joints of different numbers of elements coming together. As presented here, the geometry is based on the Cuboctahedron, leading to the construction of Octet Trusses as patented by Buckminster Fuller in 1961. However, one could easily design different configurations.
It includes rotors specifically to mount the Firgelli L16 linear actuators and carbon tubes. These should be considered design starting points for mounting other members.
The system is scalable. It can be scaled down to the point that your members start to collide with each other.
This is an open-source hardware project meant to be a gift to the whole world. Do not attempt to patent it, which would be illegal and fraudulent. However, please manufacture it and make money with it in any way that you can.
I look forward to your comments and contributions. You may wish to join our team (you can be the second!) or promote our project, Public Invention (For All Humanity), PIFAH where many other nascent are ideas are published, and you may wish to subscribe to my YouTube channel.
To contact me directly, send email to read.robert@gmail.com
This is a new kind of joint which allows multiple members to come together at a single point with some flexibility in their angles. This allows us to make a strong joint for implementing irregular space frames or robots constructed from linear actuators.
NOTE: My initial testing with moving actuators suggests that although the joint works, it is quite "frictiony" when printed on the Fast setting on a Replicator 2---which makes sense because it is visibly striped and rough. However, to be an EFFECTIVE mechanical joint, we may have to increase the resolution of the print, or even provide lubrication. I'm trying to test thoroughly before I take that step however. The current joint should be considered a initial design and a work in progress, not a finished product.
You may want to watch my YouTube video explaining this.
... or my video showing the large robot in action:
This is a collection of things which work together to form a construction system for building spaceframes, or moving robots, that allow some angular displacement in the members, without sacrificing strength or structural integrity.
The fundamental innovation here is that the rotors can move, up to about 30 degrees, without loosing any structural strength, because they are always pointed precisely at the center of the joint. Up to manufacturing tolerances, the joint does not introduce an "slop" or new degrees of freedom in the central point when bringing members together. This allows us to make trusses and spaceframes that are curved or wavy or in other ways deviate from purely equilateral triangles, without having to create a new joint for each angular displacement.
This system has a number of pieces. The fundamental parts are the ball, the lock, and rotors. The lock holds the rotor against the ball and ensures it always is pointed at the center of the joint (which is the center of the ball.)
Separate parts include separate caps that can be screwed to the locks to produce joints of different numbers of elements coming together. As presented here, the geometry is based on the Cuboctahedron, leading to the construction of Octet Trusses as patented by Buckminster Fuller in 1961. However, one could easily design different configurations.
It includes rotors specifically to mount the Firgelli L16 linear actuators and carbon tubes. These should be considered design starting points for mounting other members.
The system is scalable. It can be scaled down to the point that your members start to collide with each other.
This is an open-source hardware project meant to be a gift to the whole world. Do not attempt to patent it, which would be illegal and fraudulent. However, please manufacture it and make money with it in any way that you can.
I look forward to your comments and contributions. You may wish to join our team (you can be the second!) or promote our project, Public Invention (For All Humanity), PIFAH where many other nascent are ideas are published, and you may wish to subscribe to my YouTube channel.
To contact me directly, send email to read.robert@gmail.com
Similar models
thingiverse
free

Experimental Joint System by charlesodonnell
...y. a drop of lube helps.
the connecting members lock into the joint halves with near-zero play, forming a very rigid fixed joint.
grabcad
free

BLAT Lug Actuation Nut
...blat lug actuation nut
grabcad
used in the blat tool to move the locking lugs which secure the blat in the transition joint.
thingiverse
free

Claw Ball Joint by Angus
...ws movement far past what most ball joints allow. use it for your construction projects! this is the joint from my mr clicky toy.
cg_trader
$30

Kim Soo-hyun bust sculpture | 3D
...kim soo-hyun bust sculpture | 3d
cg trader
3d portrait sculpture of kim soo-hyun ready to 3d print in any size you want.
thingiverse
free

Snappy the Robot (openscad) by lukemillermakes
... joints
bonus: a plate and t-bar that i use to mount a webcam--also based on the ball joint.
how would you customize your robot?
thingiverse
free

Jointed Robot by Shira
...uired! i hope you enjoy."
here you can see how it moves: https://www.youtube.com/watch?v=bh3-t-4muzq&feature=youtu.be
cults
free

Jointed Robot
...red! i hope you enjoy."
here you can see how it moves: https://www.youtube.com/watch?v=bh3-t-4muzq&feature=youtu.be
thingiverse
free

Series Elastic Actuator for Dynamixel MX64 and MX106 by tioguerra
...int." journal of intelligent & robotic systems (2017): 1-10. https://link.springer.com/article/10.1007/s10846-017-0727-y
cg_trader
$11

The Red Robotic Arm
...is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be...
thingiverse
free

Print in Place - Tight Fit Ball Joint by gfursu
..., move them and they will get unstuck and will allow for movement, yet offer resistance, so it can stay in the position moved to.
Robertlread
thingiverse
free

Gluss Pusher Bobbin V2.1 by RobertLRead
...ugh it certainly functions and is better than the last version.
the original design is: http://www.thingiverse.com/thing:981840
thingiverse
free

Arduino Mega Enclosure with Shield and Brackets by RobertLRead
...ty modification of a battery case file from
heinz spiess, found here at thingiverse, though i ended up using almost none of that.
thingiverse
free

Gluss Pusher Stator V24 by RobertLRead
...bobbins correctly spaced at 1.5"s. this is a mistake, but probably anyone using it will want to change the geometry anyway.)
Turret
3d_ocean
$25

Rocket Turret
... be used in any sf type of game, especially in tower defense games. - rocket turret: 4100 polygons - props: 155 polygons - tex...
3d_ocean
$19

Laser Turret
...be used in any sf type of game, especially in tower defense games. - laser turret: 3025 polygons - props: 270 polygons - textu...
turbosquid
$6

Turret
...t
turbosquid
royalty free 3d model turret for download as ma on turbosquid: 3d models for games, architecture, videos. (1276329)
3d_ocean
$19

Chain Gun Turret, Machinegun Turret
...be used in any sf type of game, especially in tower defense games. - chain gun turret: 6599 polygons - textures: 6000×...
turbosquid
$15

Turret
...uid
royalty free 3d model turret for download as dae and fbx on turbosquid: 3d models for games, architecture, videos. (1683078)
3d_ocean
$25

Railgun Turret
...easily be used in any sf type of game, especially in tower defense games. - railgun turret: 6239 polygons - textures: 6000×600...
3d_export
$5

Turret
...turret
3dexport
material : iron
turbosquid
$45

Turret
...royalty free 3d model turret for download as ma, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1626689)
turbosquid
$2

Turret
...alty free 3d model turret for download as blend, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1650617)
3d_ocean
$19

Plasma Turret
... be used in any sf type of game, especially in tower defense games. - plasma turret: 6239 polygons - props: 522 polygons - tex...
Joint
turbosquid
$5

Joint
...turbosquid
royalty free 3d model joint for download as blend on turbosquid: 3d models for games, architecture, videos. (1179882)
3d_export
$5
joint handle
...joint handle
3dexport
joint handle
3d_export
$5
knuckle joint
...knuckle joint
3dexport
this is a 3d model of knuckle joint
3d_export
$5

Knuckle Joint
...knuckle joint
3dexport
industry use knuckle joint
3ddd
$1

PENTA Joint
...penta joint
3ddd
penta
http://www.lampcommerce.com/en/catalogue/brands/penta-light/joint-floor-lamp
turbosquid
$49

Joint | Project
...squid
royalty free 3d model joint | project for download as on turbosquid: 3d models for games, architecture, videos. (1297983)
turbosquid
$10

universal joint
...squid
royalty free 3d model univresal joint for download as on turbosquid: 3d models for games, architecture, videos. (1309400)
turbosquid
$15

Joint Ashtray
...squid
royalty free 3d model joint ashtray for download as ma on turbosquid: 3d models for games, architecture, videos. (1199702)
turbosquid
$5

Unrolled joint
...e 3d model unrolled joint for download as blend, obj, and stl on turbosquid: 3d models for games, architecture, videos. (1577889)
3d_export
$5

Cardan Joint 3D Model
...cardan joint 3d model
3dexport
cardan joint
cardan joint 3d model fau 71171 3dexport