Thingiverse

Smart Robot Cerbero CAR (Arduino) 1 e 2 by ZeroShell
by Thingiverse
Last crawled date: 3 years, 1 month ago
Leggere relazione allegata (Read attached report)
tutta la documentazione la trovate quihttps://www.thingiverse.com/thing:2782753
questo robot ha anche la predisposizione al rilevamento di suoni, ed è conforme con il regolamento per la romecup 2017.
Lo scopo di questa prova è di progettare e realizzare un robot capace di muoversi autonomamente alla ricerca di sorgenti luminose collocate in posizioni fisse e sconosciute all'interno di un campo di movimento di dimensioni assegnate che presenta al suo interno degli ostacoli fissi posizionati casualmente, dunque il robot dovrà evitare tali ostacoli e rilevare un valore indicativo della quantità di vapori di sostanze solventi collocate in posizioni fisse all'interno del campo di movimento ed in particolare nell’intorno di fonti luminose, durante la prova il robot dovrà inviare ad un terminale, in tempo reale e mediante comunicazione bluetooth, i dati raccolti. Il robot avrà un tempo di massimo 7 minuti per individuare tutti gli obiettivi (fonti luminose e sorgenti di vapore). La prova si riterrà superata solo se, il robot avrà trovato tutte le luci e tutte le sorgenti di vapore entro il tempo prestabilito, più veloce è a trovarla maggiore sarà il punteggio. Durante la prova sono ammesse due sole possibilità di "deadlock" (blocco) del robot.
tutta la documentazione la trovate quihttps://www.thingiverse.com/thing:2782753
questo robot ha anche la predisposizione al rilevamento di suoni, ed è conforme con il regolamento per la romecup 2017.
Lo scopo di questa prova è di progettare e realizzare un robot capace di muoversi autonomamente alla ricerca di sorgenti luminose collocate in posizioni fisse e sconosciute all'interno di un campo di movimento di dimensioni assegnate che presenta al suo interno degli ostacoli fissi posizionati casualmente, dunque il robot dovrà evitare tali ostacoli e rilevare un valore indicativo della quantità di vapori di sostanze solventi collocate in posizioni fisse all'interno del campo di movimento ed in particolare nell’intorno di fonti luminose, durante la prova il robot dovrà inviare ad un terminale, in tempo reale e mediante comunicazione bluetooth, i dati raccolti. Il robot avrà un tempo di massimo 7 minuti per individuare tutti gli obiettivi (fonti luminose e sorgenti di vapore). La prova si riterrà superata solo se, il robot avrà trovato tutte le luci e tutte le sorgenti di vapore entro il tempo prestabilito, più veloce è a trovarla maggiore sarà il punteggio. Durante la prova sono ammesse due sole possibilità di "deadlock" (blocco) del robot.
Similar models
thingiverse
free

Smart Robot Cerbero CAR (Arduino) by ZeroShell
...ovarla maggiore sarà il punteggio. durante la prova sono ammesse due sole possibilità di "deadlock" (blocco) del robot.
3dwarehouse
free
Scheletro portante in legno per garage
...a niente paura è collaudatissimo è stato copiato da un vecchio falegname quando era nelle baracche in germania durante la querra.
3dwarehouse
free

Campo 1 - Prova I
...ea di accoglienza indirizzo prova (quel puntino in fondo al campo è una fossa imhoff) ;-) #area_di_accoglienza #sebach #tendopoli
3dwarehouse
free

Locomotiva a vapore a Pescara
...motiva c62 http://sketchup.google.com/3dwarehouse/details?mid=21655789dfe68c488e2c190e770fdce7 io l'ho modificato ed adattato
3dwarehouse
free

Basilica di Santa Maria di Collemaggio
... ed è sede di un giubileo annuale unico nel suo genere. la basilica è stata gravemente danneggiata durante il terremoto del 2009.
grabcad
free

Robot guida "Gilberto"
...vedenti, videosorveglianza e telecontrollo.
gilberto si muove, vede, parla, annusa e interagisce. riconosce ed evita gli ostacoli
3dwarehouse
free

Palazzo dell'Università degli Studi Federico II a Napoli
...na lunga scalinata sale verso il collegio dei gesuiti del 1593, che fu ampliato per i lavori di edificazione del palazzo odierno.
3dwarehouse
free

monumento agli alpini a Bergamo
...ale raffigurante la scalata di una penna nera, impegnato a superare gli ostacoli della montagna. #alpini #ana #bergamo #monumento
3dwarehouse
free

CARTINA DELL'EUROPA CON LE SEDI
...ale europea- francoforte il parlamento di strasburgo il parlamento di bruxelles è presente anche la sede dell'unesco a parigi
3dwarehouse
free

San Gianuario
...mento nazionale. opera di mastro melchiorre, è databile tra il secolo xi e xii. #basilicata #chiesa #marsico_nuovo #san_gianuario
Cerbero
thingiverse
free

saint seiya cerberos plata by Francqueli
...saint seiya cerberos plata by francqueli
thingiverse
saint seiya cerberos plata
thingiverse
free

Cerbero Podcast Keyring by fabiuz7
...thingiverse
the logo of cerbero podcast, factually the best italian podcast.
this is a unofficial fanart, i have no affiliation.
thingiverse
free
saint seiya hades cerberos box by Francqueli
...s por hades(six pack saints revived by hades)https://cults3d.com/en/3d-model/game/saint-seiya-pack-de-6-santos-revividos-de-hades
thingiverse
free
Smart Robot Cerbero CAR (Arduino) by ZeroShell
...ovarla maggiore sarà il punteggio. durante la prova sono ammesse due sole possibilità di "deadlock" (blocco) del robot.
cg_trader
$2

Dante Cerbero- Saint Seiya - Bripo Cubes version
... saintseiya anime lego roblox bripocubes cerberus cerbero dante various models various models character fantasy fantasy character
3dwarehouse
free

Cerbero
...cerbero
3dwarehouse
cerbero
3dwarehouse
free
Torre de los Cerberos
...3dwarehouse
antigua torre defensiva #andalucia #antigua #arabe #coria_del_rio #dos_hermanas #orippo #sevilla #torre #via_augusta
3dwarehouse
free

Ercole e Cerbero
...e ipotetica di parte del pavimento dell'abside della basilica della villa romana del casale a piazza armerina #abside #ercole
3dwarehouse
free

Corona, cetro y correa de Hades.
...donde se encuentran los muertos; el sepulcro. #ancient #antigua #cerbero #dios #fuego #grecia #greek #hades #infierno #inframundo #monument #olimpo...
Zeroshell
thingiverse
free

Peace by ZeroShell
...peace by zeroshell
thingiverse
for a party with hippie dress code.
thingiverse
free

Japanese stiks by ZeroShell
...japanese stiks by zeroshell
thingiverse
enjoy your japanese/chinese food
thingiverse
free

Customizable Enlightened keyring by ZeroShell
...customizable enlightened keyring by zeroshell
thingiverse
enjoy the light !!
thingiverse
free

Toilet Paper Key by ZeroShell
...toilet paper key by zeroshell
thingiverse
for anyone who wants to change toilet paper
thingiverse
free

Micro Drone Indoor by ZeroShell
...micro drone indoor by zeroshell
thingiverse
3d print your drone for indoor flight
thingiverse
free

Heavy Printer Pro2 by ZeroShell
...heavy printer pro2 by zeroshell
thingiverse
my new 3d printer!!
old one: https://www.thingiverse.com/thing:2290942
thingiverse
free

Cone blower by ZeroShell
...dewalk.
diameter tube: 70mm
the two files differ in the shell: 0.8mm (in and out with 0.4 nozzle) and 1.6 is a stronger version.
thingiverse
free

Floppy Penholder by ZeroShell
...u can add some glue at the corners.
--> check the new version: https://www.thingiverse.com/thing:2558604
thanks for whatching.
thingiverse
free

PenHolder USB SD MicroSD CreditCard by ZeroShell
...penholder usb sd microsd creditcard by zeroshell
thingiverse
organize your desk!
if you need a personalized design ask me.
thingiverse
free

Freezer handle by ZeroShell
...ne.
there are 2 versions, in the first version you have to make the holes after had print.
hole: 10mm
screw: 5mm
head screw: 10mm
Arduino
turbosquid
$7

Arduino
...turbosquid
royalty free 3d model arduino for download as max on turbosquid: 3d models for games, architecture, videos. (1197165)
turbosquid
$3
Arduino
...turbosquid
royalty free 3d model arduino for download as c4d on turbosquid: 3d models for games, architecture, videos. (1305484)
3d_export
$5
arduino satellite
...rt
this model is the exact arduino based satellite model with some basic sensors and camera modules and also includes batteries.
turbosquid
$1

Arduino UNO
...alty free 3d model arduino uno for download as , stl, and wrl on turbosquid: 3d models for games, architecture, videos. (1515932)
3d_export
$5

esp8266 box arduino
...esp8266 box arduino
3dexport
box for esp8266 module with wire hole. inside dimensions: 49x26 mm. height 15 mm.
3d_export
$60

Arduino Uno Rev3 Microcontroller 3D Model
...mega328p circuit board spark cable wire 5v 74v 9v 111v
arduino uno rev3 microcontroller 3d model danielgarnier4403 97237 3dexport
3d_export
free

arduino rover kit
...no!!! materials: no!!! rigged: no animated: no uv mapped: no it is not an exact copy of the original! not subject to 3d printing!
3d_ocean
$7

The housing for the 3d Printer
...the housing for the 3d printer 3docean arduino device housing stl the housing consists of two portions:...
3d_export
$5

arm 4 axis
...uno -4 servo motor 180° -3 joystick (x,y) for arduino -mdf wood -some wires -cnc laser cut...
3d_export
$5
solar tracker
...machine for the frame . list of material : -arduino uno -2 step motor with driver -4 ldr sensor...
Smart
3ddd
$1

SMART
...smart
3ddd
стул smart
3d_export
$5

smart tv
...smart tv
3dexport
beautiful smart tv
turbosquid
$15

Smart
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

CTSsalotti / Smart
...ctssalotti / smart
3ddd
ctssalotti , угловой
ctssalotti smart 2800х1700
3ddd
$1

Gala Smart раковина
...gala smart раковина
3ddd
gala , smart
производитель gala
модель smart
design_connected
$13

Smart&Sleek
...smart&sleek
designconnected
wisteria smart&sleek computer generated 3d model.
3d_export
$5

Smart 3D Model
...smart 3d model
3dexport
smart car small mercedes
smart 3d model pio33d 67449 3dexport
3d_export
$15

Smart 3D Model
...smart 3d model
3dexport
smart auto car compact_car compat
smart 3d model savmart 95148 3dexport
3d_export
$12

samsung smart tv
...samsung smart tv
3dexport
samsung smart tv
3ddd
$1

Smart
...smart
3ddd
материалы вирей. модель не моя. переделал под вирей просто.
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Car
3d_export
$5

car
...car
3dexport
luxury car high quality car
3d_export
$5

car
...car
3dexport
luxury car high quality car
3d_export
$5

car
...car
3dexport
luxury car high quality car
3d_export
$5

car
...car
3dexport
luxury car high quality car
3d_export
$5

car
...car
3dexport
luxury car high quality car
archibase_planet
free

Car
...
archibase planet
car sports car motor-car sportster
car nascar#1 n300114 - 3d model (*.gsm+*.3ds) for exterior 3d visualization.
archibase_planet
free

Car
...ibase planet
car motor-car sportster sports car
car gablota xform n190214 - 3d model (*.gsm+*.3ds) for exterior 3d visualization.
archibase_planet
free

Car
...car
archibase planet
car motor car transport
car vaz 2104- 3d model for interior 3d visualization.
3d_export
$15

car
...car
3dexport
car
3d_export
free

car
...car
3dexport
car
E
3ddd
$1

WALL-E
...wall-e
3ddd
wall-e , робот
wall-e
3d_export
$100

e-rickshaw
...e-rickshaw
3dexport
e-rickshaw- it have 3d model of passenger e-rickshaw
3d_ocean
$12
Wall E
...wall e
3docean
character robot wall e
its a 3d model of wall e….
turbosquid
$68
Model-E Droids 2-E Q-E Star Wars
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
cg_studio
$45

Model-E Droids 2-E Q-E Star Wars3d model
....3ds .c4d .obj .vue - model-e droids 2-e q-e star wars 3d model, royalty free license available, instant download after purchase.
3d_export
$100

e-rickshaw
...e-rickshaw
3dexport
e-rickshaw design for passenger it have all mechanical component
design_connected
$7

Cone E
...cone e
designconnected
bonaldo cone e computer generated 3d model. designed by pasini, ennio.
3ddd
$1

Wall-E NEW
...wall-e new
3ddd
wall-e , робот
wall-e
design_connected
$29

Extrasoft E
...extrasoft e
designconnected
living divani extrasoft e computer generated 3d model. designed by lissoni, piero.
3ddd
$1

E-Turn
... скамейка
современная скамейка фирмы kundalini.
модель e-turn.
дизайнер brodie neil.
размеры: h 42 cm l 185 cm w 54 cm
1
turbosquid
$69

armchairs(1)(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$15

ring 1+1
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10

chair(1)(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$8

Chair(1)(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$2

RING 1(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1

Table 1(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1

house 1(1)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$59

Formula 1(1)
...lty free 3d model formula 1 for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1567088)
design_connected
$11

No 1
...no 1
designconnected
sibast no 1 computer generated 3d model. designed by sibast, helge.
turbosquid
$2

desert house(1)(1)
...3d model desert house(1)(1) for download as 3ds, max, and obj on turbosquid: 3d models for games, architecture, videos. (1055095)
2
design_connected
$11

No 2
...no 2
designconnected
sibast no 2 computer generated 3d model. designed by sibast, helge.
turbosquid
$6
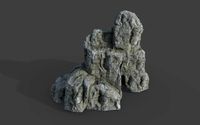
Cliff Rock 2-2
...uid
royalty free 3d model cliff rock 2-2 for download as obj on turbosquid: 3d models for games, architecture, videos. (1619161)
turbosquid
$29
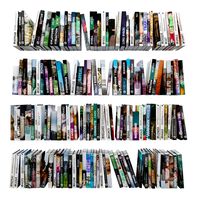
Book variation 2 2
...3d model book variation 2 2 for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1366868)
turbosquid
$22

Classic baluster (2) (2)
...assic baluster (2) (2) for download as max, obj, fbx, and stl on turbosquid: 3d models for games, architecture, videos. (1483789)
turbosquid
$99

Smilodon 2 Pose 2
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$20

Barrel Barricade 2-2
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$6

Wall Trophy (2) (2)
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Tire label 2 of 2
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Кровать, 2 тумбочки, 2 светильника
...кровать, 2 тумбочки, 2 светильника
3ddd
кровать, 2 тумбочки, 2 светильника
нормальное качество
формат 3ds max
без текстур
3ddd
free

Кровать, 2 тумбочки, 2 светильника
...кровать, 2 тумбочки, 2 светильника
3ddd
кровать, 2 тумбочки, 2 светильника
нормальное качество
формат 3ds max
без текстур