Thingiverse
Small Powered Winch by JamesNewton
by Thingiverse
Last crawled date: 3 years ago
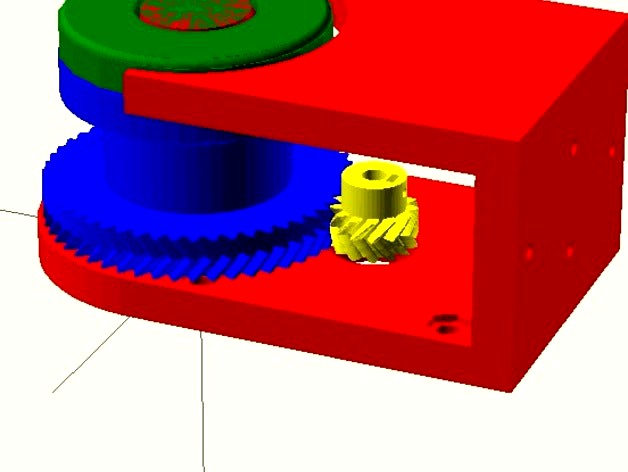
This is a first attempt at a computer controlled, stepper motor driven, powered winch. Like the winch design it is based on, there are ball bearing races on the base around the spindle (both red), on the spindle itself (with break away support structures) and on the underside of the screw on cap (green). These are filled with 6mm (not 2mm) ball bearings to provide a smooth support for the reel (blue). The reel is turned by the drive gear (yellow) which is attached to the shaft of the stepper motor which is mounted up through the bottom of the base. The current stepper size is NEMA23, but the unit can be scaled up for larger drive.
There are many possible uses including running a "zip line" for a ghost that is raised and lowered with a semi-random pattern, or any other light weight object that needs to be raised and lowered automatically. I want to use three of them to make a "flying" area robot like the "SkyCam".http://en.wikipedia.org/wiki/Skycam
This was inspired by the "WireBot" project originally featured in Make Magazine:http://makezine.com/projects/Build-a-Wirebot/
(if the original link doesn't work, here is the archive)http://web.archive.org/web/20120806013138/http://makeprojects.com/Project/Build-a-Wirebot/744/1
And the original is here:https://www.synthetos.com/grblshield-wirebot/
and finally, the python program to pre-process the G-Code from XYZ to cable length is here:https://github.com/synthetos/WireBot
Because the position of the wirebot is easily calculated from the length of cable released by the winches, there are no positioning problems for the robot. Complex feedback systems or micro GPS are not required to position accurately over a given area such as a room or a hall.
The applications for a cable positioned robot are mindboggling.
Imagine a robot hanging above a garden on three poles that can "fly" over the plants taking pictures for remote review, probing the soil for moisture level, and if fitted with a gripper or something like the "Awesome Auger^" could remove weeds, dig small holes to plant seeds, etc...
A platter hung under the wirebot could carry food from kitchen to tables in a robot restaurant.
A simple gripper under the wirebot could be programmed to pick up objects from the floor of a kids room in a pattern which blindly covers all open floor space. All objects could be dropped in a hamper, or held in front of a camera for machine identification and then sorted into the appropriate bins. What to get kids excited about robots? Done!
Delivery of product, food, snacks, or anything inside a large hall or event field could be automated and traffic avoided. Guiding people from point a to point b could also be more safely and practically done by wirebots than by quadcopters as has been proposed.
See instructions for the current state of attempts to print this thing.
There are many possible uses including running a "zip line" for a ghost that is raised and lowered with a semi-random pattern, or any other light weight object that needs to be raised and lowered automatically. I want to use three of them to make a "flying" area robot like the "SkyCam".http://en.wikipedia.org/wiki/Skycam
This was inspired by the "WireBot" project originally featured in Make Magazine:http://makezine.com/projects/Build-a-Wirebot/
(if the original link doesn't work, here is the archive)http://web.archive.org/web/20120806013138/http://makeprojects.com/Project/Build-a-Wirebot/744/1
And the original is here:https://www.synthetos.com/grblshield-wirebot/
and finally, the python program to pre-process the G-Code from XYZ to cable length is here:https://github.com/synthetos/WireBot
Because the position of the wirebot is easily calculated from the length of cable released by the winches, there are no positioning problems for the robot. Complex feedback systems or micro GPS are not required to position accurately over a given area such as a room or a hall.
The applications for a cable positioned robot are mindboggling.
Imagine a robot hanging above a garden on three poles that can "fly" over the plants taking pictures for remote review, probing the soil for moisture level, and if fitted with a gripper or something like the "Awesome Auger^" could remove weeds, dig small holes to plant seeds, etc...
A platter hung under the wirebot could carry food from kitchen to tables in a robot restaurant.
A simple gripper under the wirebot could be programmed to pick up objects from the floor of a kids room in a pattern which blindly covers all open floor space. All objects could be dropped in a hamper, or held in front of a camera for machine identification and then sorted into the appropriate bins. What to get kids excited about robots? Done!
Delivery of product, food, snacks, or anything inside a large hall or event field could be automated and traffic avoided. Guiding people from point a to point b could also be more safely and practically done by wirebots than by quadcopters as has been proposed.
See instructions for the current state of attempts to print this thing.
Similar models
3dwarehouse
free

Winch
...winch
3dwarehouse
\winch with cabled reel #crane #drum #electric_motor #motor #reel #winch #wire
3dwarehouse
free

Winch with cable
...winch with cable
3dwarehouse
a simple winch with wound round cable #cable #reel #rope #winch
grabcad
free

3D Printable soft gripper (Cable actuation)
...t the gripper with ninjaflex and can be used of different projects based on soft grippers.
editable for different stepper motor.
cg_trader
$10

Rigged Winch for Blender
...position or the motion of the free end. please contact me if you request a winch with size and proportions of your specific need.
thingiverse
free

robotic arm gripper assembly by adnanrk
...er assembly from my "low cost robotic arm project"
you can check the project video here : https://youtu.be/2-mnldszel4
thingiverse
free

Reel to Reel Spindle Clamps by SteveGlenner
...s designed for rigid material like pla or abs, and the cone-shaped one is designed to be printed with flexible filament like tpu.
thingiverse
free

Dual stepper motor winch by toekiman
...l add more parts later.
to be used with 28byj-48 steppers. (i'm using the 12v version)
bearings are 608zz's ( 8 x 16 x 5)
grabcad
free

Gripper for robotic arm
...m
grabcad
simple servo driven gripper for a robotic arm project. uses two gws pico-bb servos to drive rotation and gripper claw.
grabcad
free

Robot gripper
...electric grippers. manufacturers choose grippers based on which handling application is required and the type of material in use.
grabcad
free

Final Project Pedal Car
... could have been done better, ie its too heavy, no 8 year old can drive this although if one could i would like to see that kid
Jamesnewton
thingiverse
free

CSV2PNG by JamesNewton
...mations of collected data, or (with a tweak) make stl or dxf files from lists of names, e.g. laser cut or 3d printed name badges.
thingiverse
free

Parametric Simple Clip-On Fan Mount by JamesNewton
...ion. it's no were near as nice looking as the original, but smooth curves like that are tough in openscad... at least for me.
thingiverse
free

Rough Model of SpaceX Merlin Engine (fixed) by JamesNewton
...othing removed. fixed with meshlabs via filters / cleaning and repairing / remove t-vertices by edge flip. renders ok now with f6
thingiverse
free
Parametric Loom Heddle by JamesNewton
.... each thread in the warp passes through a heddle, which is used to separate the warp threads for the passage of the weft. "
thingiverse
free

NEMA Mounting Holes by JamesNewton
...s now been corrected. still not totally sure about the nut size, but it's correct for m4 at least.
see instructions for use
thingiverse
free

Customizable Drawer Guide by JamesNewton
... wife told me "you do know that those are about a dollar at the hardware store right?" i'm considering divorce. ,o)
thingiverse
free

Reagent Robot by JamesNewton
...com/spreadsheets/d/1vqrxvlswpltabc5txhsexb2c1_wagtpsexas6m93qz8/pubhtml
see also:https://hackaday.io/project/4197-reagent-robot
thingiverse
free

Parametric Timing Pulley v4 by JamesNewton
... (to 5 mm width). code from dj delore adds support for trapezoidal teeth and moves the flange to the bottom if there is only one.
thingiverse
free

Cardboard Bot by JamesNewton
...ike that used for priority mail boxes. (disclaimer: actually using a priority mail box to make a robot would violate federal law)
thingiverse
free

UP3D Plus 2 Plexi Enclosure by JamesNewton
...opback, and backfloor parts.
as time allows, i'll cut a set from cardboard and verify they work, then do them again in plex.
Winch
3d_export
$10

winch
...winch
3dexport
turbosquid
$15

winch
...ty free 3d model winch for download as 3ds, ige, obj, and 3dm on turbosquid: 3d models for games, architecture, videos. (1355394)
3ddd
$1

Faro Winch
...t lamphttp://www.faro.es/es/productos/winch-lampara-colgante-marron/
polyrate: 23679
в архиве присутствуют fbx и obj.
turbosquid
$30

Winch
...ree 3d model winch for download as ma, max, obj, fbx, and stl on turbosquid: 3d models for games, architecture, videos. (1368556)
3ddd
$1

Faro Winch
...://www.faro.es/es/productos/winch-lampara-colgante-con-peso-marron/
polyrate: 238187
в архиве присутствуют fbx и obj.
3ddd
$1

Faro Winch
...ttp://www.faro.es/es/productos/winch-lampara-aplique-marron-h-350mm/
polyrate: 13307
в архиве присутствуют fbx и obj.
3ddd
$1

Faro Winch
...ttp://www.faro.es/es/productos/winch-lampara-aplique-marron-h-460mm/
polyrate: 13687
в архиве присутствуют fbx и obj.
turbosquid
$15

Rope Winches
...squid
royalty free 3d model rope winches for download as max on turbosquid: 3d models for games, architecture, videos. (1415993)
turbosquid
$10

Winche(cabrestante)
...ee 3d model winche(cabrestante) for download as fbx and blend on turbosquid: 3d models for games, architecture, videos. (1376679)
turbosquid
$12
Stern Winch
...y free 3d model stern winch for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1591899)
Powered
turbosquid
$100

power
...ower
turbosquid
royalty free 3d model power for download as on turbosquid: 3d models for games, architecture, videos. (1421990)
3d_export
$5

Power
...power
3dexport
3d_export
$5

power outlets
...power outlets
3dexport
power outlets
3ddd
$1

lion power
...lion power
3ddd
лев , статуя
lion power gold sculpture
3ddd
$1

Sea Power
...
компас , море , часы
часы с компасом sea power
3ddd
free

Meridiani / Power
...power
3ddd
meridiani , круглый
стол power производитель meridiani, диаметр 120,высота 67
3d_export
$5

Power Surge
...power surge
3dexport
the power surge is a all mesh carnival ride to lower in game part count and lag
turbosquid
$8

Airport Ground Power Unit (AXA Power )
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$50

Power Houser
...rbosquid
royalty free 3d model power houser for download as on turbosquid: 3d models for games, architecture, videos. (1333800)
3d_export
$5

power outlet
...power outlet
3dexport
power outlet<br>format file maya 2018, 3d max 2017, obj, fbx
Small
3d_export
$10

small bed
...small bed
3dexport
small bed design for small house or small room with storage
3d_export
$10

small house
...small house
3dexport
a small house. the project of a small country house.
3d_ocean
$4

Small Cake
...small cake
3docean
cake food small
just a small cake ready for render
3d_export
$6

small armchair
...small armchair
3dexport
small armchair
3d_export
$5
a small world
...a small world
3dexport
a small world
3d_export
$5

small room
...small room
3dexport
small cozy room
3d_export
$5

small tank
...small tank
3dexport
small tank modeling in blender
design_connected
free

small lounge
...small lounge
designconnected
free 3d model of small lounge
design_connected
$11

Watermelons Small
...watermelons small
designconnected
watermelons small computer generated 3d model.
3d_export
$5

small house
...small house
3dexport
a small cozy house on the foundation, the interior is missing.