GrabCAD
Right hand adjustable terminal device, ICRC compatible
by GrabCAD
Last crawled date: 1 year, 10 months ago
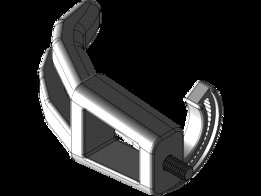
The proposed hand prosthetic has three fingers. The pointing finger and the middle finger are in a fix position on a palm like shape, while the opposable finger can be placed in different positions on a circular path. The opposable finger can be also rotated so that to finely tune the distances between fingers and thus to adapt it to different objects. Some objects can be hold using all three fingers, while others can be hold using only two fingers (one of them mandatory being the opposable finger).
The proposed device is a passive one, but it can be adjusted for accommodating objects with different shapes and dimensions. The objects can be placed and fixed in the space between fingers using the left hand. At the beginning of hand prosthetic use, the M15x25mm hexagonal head screw is fixed in a hexagonal pocket within the palm and by using a hexagonal cover and three screws.
The opposable finger is fixed on the palm using a M5 screw and a nut. The nut can slide within a palm circular slot so that the user to be able to tight the screw-nut with only one hand by using a screwdriver. The opposable finger rotational movement is blocked using a locking washer and by threading the M5 screw.
In order to reduce the cost, the prosthetic has a small number of components which can be manufactured by 3D printing: palm, three fingers and a cover. Standard metallic components are also used: M15x25mm screw, 3 M3x5mm screws, M5x30mm screw and a locking washer. Another design option for the opposable finger is to include also a threaded cylindrical part, instead of the M5 screw. Version 2 is also possible for palm part. Also, in order to make it easier to print, the circular part of the palm can be attached using screws by the trapezoidal part.
On the circular shape of the palm and opposable finger, lines markers can be drawn by each user so that by aligning them to indicate what object can be accommodated in what finger’ position.
The proposed device is a passive one, but it can be adjusted for accommodating objects with different shapes and dimensions. The objects can be placed and fixed in the space between fingers using the left hand. At the beginning of hand prosthetic use, the M15x25mm hexagonal head screw is fixed in a hexagonal pocket within the palm and by using a hexagonal cover and three screws.
The opposable finger is fixed on the palm using a M5 screw and a nut. The nut can slide within a palm circular slot so that the user to be able to tight the screw-nut with only one hand by using a screwdriver. The opposable finger rotational movement is blocked using a locking washer and by threading the M5 screw.
In order to reduce the cost, the prosthetic has a small number of components which can be manufactured by 3D printing: palm, three fingers and a cover. Standard metallic components are also used: M15x25mm screw, 3 M3x5mm screws, M5x30mm screw and a locking washer. Another design option for the opposable finger is to include also a threaded cylindrical part, instead of the M5 screw. Version 2 is also possible for palm part. Also, in order to make it easier to print, the circular part of the palm can be attached using screws by the trapezoidal part.
On the circular shape of the palm and opposable finger, lines markers can be drawn by each user so that by aligning them to indicate what object can be accommodated in what finger’ position.
Similar models
grabcad
free

3-D Printed Terminal Prosthetic
...bags with little effort and serves as the opposing digit to the thumb for grasping items that require a "pinch" motion.
grabcad
free

MODIFIED MS PROSTHETIC HAND
...facilitate some actions like combing holding pen/pencil and other similar tasks. tool box can be customised to accomodate blades...
thingiverse
free

Screw box M3, M4, M5 by stenc55
...m4 box use m3 or m5, dimensions are the same.
lid is fixed with 2x m3x25 screw.
screws, nuts and washers are not included in .stl
thingiverse
free

V.2 Flex Fingers, Swivel Thumb Prosthetic Hand by 1d1
...ximation of an actual hand. the mesh palm is scaled the same percentage as the palm or can be printed larger for a bigger pocket.
grabcad
free

Raptor Prosthetic Hand
...ic as the interface to the actuation cable. this will maintain grip strength by prevent crushing or jamming of the entire system.
grabcad
free

Multi grasp prosthetic hand
...multi grasp prosthetic hand
grabcad
my proposal for prosthetic terminal device challenge.
grabcad
free

crane hook
...s and fixed in position by means of the lock-nuts 7 and 8. the washers 10 are used for clamping the
plate spacers with lock-nuts.
thingiverse
free

Falcon Fork, Prosthetic attachment by martinj15
...e fork into place.
the base bolt then fits into the prosthetic hand, such that the entire assembly is then attached to the hand.
3dwarehouse
free

Bolt M5 dynamic: hexagon, cylindrical or countersunk with (lock)nut and (spring)washers
...ff this model and make a solid of it. you can make a solid with tools/solid-tools/union the centreline wil be delete in the solid
thingiverse
free

experimental prosthetic hand ( using phoenix finger ) by TMesple
...ntal prosthetic hand ( using phoenix finger ) by tmesple
thingiverse
experimental shapes to adapt phoenix finger on an open hand
Icrc
thingiverse
free

The ICRC protese hand MEC 4.0 by Dan2JCAD
...est a classroom ;-)
check enable community website for prosthethic needshttp://www.enablecommunityfoundation.org/
best regards
jj
grabcad
free

ICRC ARTICULATED HAND
...urface on the finger tips and to provide spring force. each digit is adjustable +-10 degrees by the operator for personalization.
grabcad
free

Inexpensive 3D Printed Pre-Assembled Myo-Prosthetic
...and an odt file. my prosthetic mounts to the icrc wrist mount through the 9.5mm hole on the bottom....
grabcad
free

Driving Aid
...in order to do it. it doesnt show the icrc provided but the mandatory m10 its there ready to...
grabcad
free

Modular prosthetic ARM
...modular prosthetic arm grabcad i would like to thank icrc for giving me a opportunity. i have modeled a...
grabcad
free

Prosthetic Hand
...to the m10 bolt. additionally the hand surrounds the icrc wrist for better the stronger attachement. ι used metal...
grabcad
free

MPTDC JJU-GRABBY
...printable brace or just one printable axis -easy m10 icrc fixation please note that i really missed time to...
grabcad
free

Lever Hand
...requires one 25mm m10x1.5 screw to mate with the icrc wrist unit, which i have have successfully 3d...
grabcad
free

Bolt Hand
...screws 1x 25mm m10x1.5 screw (to mate with the icrc wrist unit. i have successfully 3d printed this...
Terminal
archibase_planet
free

Terminal
...planet
terminal payment terminal
terminal internet terminal point n140815 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...nal
archibase planet
payment terminal terminal equipment
terminal n190111 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_export
$5

terminator
...terminator
3dexport
terminator. for 3d print.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal
terminal 3 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal
terminal 1 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal
terminal 2 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal
terminal 4 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal equipment
terminal n181210 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal equipment
terminal n070211 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Terminal
...terminal
archibase planet
terminal rack post
fp terminal wh - 3d model (*.gsm+*.3ds) for interior 3d visualization.
Device
3ddd
$1

device
...device
3ddd
device
3ddd
$1

device
...device
3ddd
device
archive3d
free

Device 3D Model
...device 3d model
archive3d
equipment device
device- 3d model for interior 3d visualization.
archive3d
free

Device 3D Model
... model
archive3d
device
device n050608 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archive3d
free

Device 3D Model
...e 3d model
archive3d
device gear
device - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_export
$5

rope tighten device
...rope tighten device
3dexport
rope tighten device
3d_export
$5

front clamping device
...front clamping device
3dexport
front clamping device
archive3d
free

Device 3D Model
...e3d
device kitchen ware
device n130208 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_ocean
$5

Google Chromecast device
...romecast device. if you want to know more about this device, please check url : http://www.google.com/chrome/devices/chromecast/
turbosquid
free

Smart Device
...ree 3d model smart device for download as blend, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1565624)
Compatible
3d_export
$9

cad compatible casual woman hand model f1p3d1v1hand
...s: stl, obj, fbx<br>models with quad-topology (1100 quads) are also included (f1p3d1v1hand_quad.obj, f1p3d1v1hand_quad.fbx)
3d_export
$38

uzaki rigify
...uzaki rigify 3dexport compatible-blender ...
3d_export
$5

cloud lowpoly 3d
...cloud lowpoly 3d 3dexport lowpoly 3d format fbx compatible with unreal and...
3d_export
$5

flower lowpoly 3d
...flower lowpoly 3d 3dexport lowpoly 3d format fbx compatible with unreal and...
3d_export
$5

rocks lowpoly 3d
...rocks lowpoly 3d 3dexport lowpoly 3d format fbx compatible with unreal and...
3d_export
$10

pots
...pots
3dexport
pots<br>modeled in blender<br>compatable with evee and cycels
3d_ocean
$95

Mr Techny
...for 3ds max 2010 and later – biped (2010 compatible and cat (2011 compatible) versions incluided. for maya 2012...
3d_export
$15

Smart 3D Model
...smart 3d model
3dexport
smart auto car compact_car compat
smart 3d model savmart 95148 3dexport
3d_export
$5

wooden chair 3d model
...model 3dexport 3d chair model with pbr processes.4k texture compatible with arnold...
3d_export
$5

bike fly lowpoly
...have this bike fly in upbge 0.2.4 , is compatible with blender 2.79,2.80 and others, no...
Hand
3d_export
$8

hand
...hand
3dexport
fantasy hand
3d_export
$5

hand
...hand
3dexport
male hand
3d_export
$5

hand
...hand
3dexport
realistic male hand
3d_export
$5

hand
...hand
3dexport
hand with nails and structure
archibase_planet
free

Hand
...hand
archibase planet
hand
hand n190111 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3ddd
$1

Hand
...hand
3ddd
hand
модель руки будды
3d_export
$5

hand
...hand
3dexport
it is my wrist of hand and this is on 3d sculpt
3d_export
$5

hand
...hand
3dexport
realistic male hand obj file
3d_export
$7

hand-006 rigged hand
...hand-006 rigged hand
3dexport
rigged right hand 3d model additional textures for pbr rendering included
3d_ocean
$6

Hand
...
this 3d models of the hands, made in 3ds max, has textures(.jpg), materials(.mat), rigged, the models in .max, fbx, obj format.
Adjustable
3d_ocean
$7

Adjustable Wrench
...adjustable wrench
3docean
adjustable wrench highly detailed wrench
highly detailed adjustable wrench.
3ddd
$1

Adjustable Stool
...adjustable stool
3ddd
табурет
wooden adjustable stool.
3d_ocean
$20

Adjustable Gym Bench
...st adjustable bench black equipement gym gymnastic indoor silver sport workout
3d model of black and silver adjustable gym bench.
3d_ocean
$20

Adjustable Gym Bench
...st adjustable bench black equipement gym gymnastic indoor silver sport workout
3d model of black and silver adjustable gym bench.
3d_ocean
$16

Adjustable Weight Bench
...arbell bench black equipement gym gymnastic indoor sport weight workout
3d model of black adjustable weight bench with a barbell.
turbosquid
$5

Adjustable wrench
...
royalty free 3d model adjustable wrench for download as fbx on turbosquid: 3d models for games, architecture, videos. (1313414)
3d_export
$5

adjustable tension lock
...adjustable tension lock
3dexport
adjustable tension lock
3d_export
$5

Adjustable key
...adjustable key
3dexport
turbosquid
$1

Adjustable Table
...e 3d model adjustable table for download as 3dm, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1542005)
turbosquid
$1

Adjustable Dumbbell
...el adjustable dumbbell for download as obj, fbx, dae, and stl on turbosquid: 3d models for games, architecture, videos. (1460890)
Right
turbosquid
$6

To the right
...squid
royalty free 3d model to the right for download as max on turbosquid: 3d models for games, architecture, videos. (1200265)
3d_export
$14

southern right whale
...southern right whale
3dexport
detailed model of southern right whale
3d_export
$10

Tibet right
...tibet right
3dexport
dimensions of the pencil case 404/1982/380 mm
3d_export
free
right arrow
...e <br> file contains the <br> and <br> formats.<br>you can use it for presentation slides or 3d printing.
design_connected
$16

Feng Chaise Right
... chaise right
designconnected
ligne roset feng chaise right lounge chairs computer generated 3d model. designed by didier gomez.
3d_export
$5

Right arrow 3D Model
...right arrow 3d model
3dexport
right turn sign signal signage direction
right arrow 3d model ryisnelly100 88745 3dexport
turbosquid
$5

No Right/Left Turn
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$7
Right or Wrong
...d
royalty free 3d model cross and tick for download as blend on turbosquid: 3d models for games, architecture, videos. (1239700)
3d_export
$18

shabak-right tower 01
...shabak-right tower 01
3dexport
shabak-right tower 01<br>3ds max 2015
design_connected
$18

Opium Right Arm Loveseat
... right arm loveseat
designconnected
ligne roset opium right arm loveseat computer generated 3d model. designed by gomez, didier.