Thingiverse
Multiplexed Prosthetic Devices by sandrabaskharon
by Thingiverse
Last crawled date: 3 years, 1 month ago
Offloading Neuromechanical Interface Control to Multiplexed Prosthetic Devices using Interactive RFID Enabled Micro-controllers
Offloading Neuromechanical Control to Multiplexed Prosthetic Devices using Interactive RFID enabled, Embedded Microcontrollers for both Complex object Manipulation and Globally Assistive Applications
For the most part prosthetic devices use non computer enabled mechanical components. The most advanced prototype systems, currently under development, seek to create neuro-mechanical interfaces. These approaches rely on the concept of primary "human control". However, many complex movements are in fact unconscious or “Zombie” programs running in different parts of the brain. In other words, we don’t have to think about them. This project enables the "environment" to allow a prosthetic device to control itself, thereby “off loading” enormous amounts of neural control processing while permitting the device to autonomously perform complex movements and tasks.
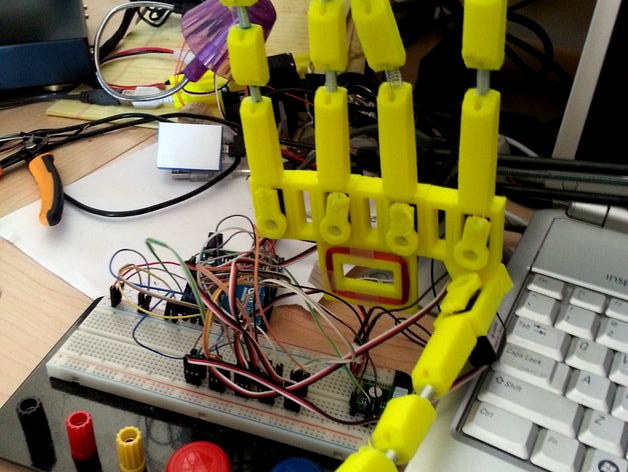
This experiment multiplexes an RFID sensor and servo actuators within a 3-D printed prosthetic hand. This approach places an RFID antenna in the palm of a 3-D printed prosthetic hand, connecting it to an embedded Arduino-Uno. This allows the prosthetic device to read different RFID tags on objects in the environment. Each tag may be associated with a different set of functions which would determine the movement of individual servo motors. This could give the prosthetic device the ability to execute different complex movements depending on which RFID tag is read by the antenna.
It may be possible to include a broad range of sensors within the 3-D printed prosthetic hand to expand innate human capabilities. This might even include data loggers to "remember" the life experience of the prosthetic device and a broad range of unique sensors.
Background
The field of prosthetics has experienced major advances over the centuries. Unfortunately many of these advances have been associated with human conflict (for example, injured war fighters). For the most part, “smart” prosthetic devices have only recently become available, however they are often very expensive and rarely are they “customized” to an individual’s preferences or needs. Fortunately, the development of truly affordable embedded electronics, inexpensive 3-D scanning software and low cost 3-D printing platforms (in an open access environment) has revealed shocking new possibilities at an unprecedented pace of development and practical application.
Experimental Design
Step 1: Configure Arduino UNO to read an RFID tag
Step 2: Configure Arduino UNO to control a 9g mini servo motor
Step 3: Write Arduino sketch to move servo after reading RFID tag
Step 4: Modify sketch to move different servos with different tags
Step 5: Design and 3D print prototype fingers with servo mounts
Step 6: Revise design to use springs as joints
Step 7: Combine servos, RFID Antenna, 3D printed parts and Arduino.
Guino
“Guino” is a free Arduino Dashboard that allows a user to send information from the Arduino board, over the serial port and view this information on a host computer. This program shows the current position of each servo motor, the unique tag number identified by the RFID antenna and the action (“function” in the arduino sketch) that is linked to that tag. This dashboard need not be connected to the prosthetic, but allows a convenient means of illustrating the microcontroller actions.
Results
Each of three tags was brought close to the RFID Antenna, 100 times. The number of times that the system correctly identified the tag number and correctly executed the appropriate function were recorded in tabular form. For these 300 separate tests, there were zero incorrect tag identifications and 100% success in executing the appropriate function in the Arduino sketch (embedded microcontroller). For this series of tests, the antenna, microcontroller and servo motors performed reliably. The finger design is unique to this project. The mechanical properties of the “spring” joints can be changed by using different springs, varying the length of the springs between the segments or by using more than one spring in the joint.
Conclusion
This project has demonstrated that it is possible to offload neuromechanical control for complex movements to an RFID enabled prosthetic device. An embedded microcontroller correctly identifies several unique RFID tags.
Each RFID tag, when identified by the embedded microcontroller, is able to trigger a specific function in the Arduino script which in turn controls the movement of 5 separate servo motors in the prostatic hand. This project demonstrates that complex movements corresponding to tasks such as “grasp”, “pinch”, and “count” are easily and reliably achievable.
Embedding “Capsule RFID tags” in the tips of each prosthetic finger, would allow an interactive work station to identify at least 5 different, unique, RFID signals and respond accordingly to the presence of the prosthetic device.
This project has used the free “Guino” serial report monitor to display the interactive data stream between the RFID antenna, various types of RFID tags, the embedded microcontroller, and the Servo motors.
Summary: This project demonstrates a potentially useful approach to offloading neuromechanical interface control for both complex object manipulation and globally assistive prosthetic applications.
Future Applied Research and Development
Temperature and Hall effect sensor (magnetic fields)
Individual human scanned and 3D printed prosthetics
2-3 axis tilt sensor for release and pick up
2-3 axis accelerometer for speed and direction
Capacitive Touch sensor for direct computer interface
Infra Red (IR) proximity sensor
Position sensing servos, “inverse kinetic” training
RFID Capsules in finger tips for workstation interactions
Wi-Fi prosthetic to prosthetic and remote between people
Smart phone “App” reprogramming and QR code reader
NFC Near Field Communication between limbs (walking)
This high school science project was overseen by:
Dr. R. Siderits at RWJUHH
Awards
The United States Air Force: Certificate of Achievement for an Outstanding Science and Engineering Fair Project
Intel Excellence in Computer Science Award: for outstanding achievement in the category of Computer Science at the Mercer Science and Engineering Fair
The Yale Science and Engineering Association Inc. Award: for Most Outstanding Exhibit in Computer Science, Engineering, Physics, or Chemistry
The Rider University Award: for the Most Superior Project
First Place award in the Computational Biology and Bioinformatics of the 2015 Mercer Science and Engineering Fair
Grand Prize of the 2015 Mercer Science and Engineering Fair
Offloading Neuromechanical Control to Multiplexed Prosthetic Devices using Interactive RFID enabled, Embedded Microcontrollers for both Complex object Manipulation and Globally Assistive Applications
For the most part prosthetic devices use non computer enabled mechanical components. The most advanced prototype systems, currently under development, seek to create neuro-mechanical interfaces. These approaches rely on the concept of primary "human control". However, many complex movements are in fact unconscious or “Zombie” programs running in different parts of the brain. In other words, we don’t have to think about them. This project enables the "environment" to allow a prosthetic device to control itself, thereby “off loading” enormous amounts of neural control processing while permitting the device to autonomously perform complex movements and tasks.
This experiment multiplexes an RFID sensor and servo actuators within a 3-D printed prosthetic hand. This approach places an RFID antenna in the palm of a 3-D printed prosthetic hand, connecting it to an embedded Arduino-Uno. This allows the prosthetic device to read different RFID tags on objects in the environment. Each tag may be associated with a different set of functions which would determine the movement of individual servo motors. This could give the prosthetic device the ability to execute different complex movements depending on which RFID tag is read by the antenna.
It may be possible to include a broad range of sensors within the 3-D printed prosthetic hand to expand innate human capabilities. This might even include data loggers to "remember" the life experience of the prosthetic device and a broad range of unique sensors.
Background
The field of prosthetics has experienced major advances over the centuries. Unfortunately many of these advances have been associated with human conflict (for example, injured war fighters). For the most part, “smart” prosthetic devices have only recently become available, however they are often very expensive and rarely are they “customized” to an individual’s preferences or needs. Fortunately, the development of truly affordable embedded electronics, inexpensive 3-D scanning software and low cost 3-D printing platforms (in an open access environment) has revealed shocking new possibilities at an unprecedented pace of development and practical application.
Experimental Design
Step 1: Configure Arduino UNO to read an RFID tag
Step 2: Configure Arduino UNO to control a 9g mini servo motor
Step 3: Write Arduino sketch to move servo after reading RFID tag
Step 4: Modify sketch to move different servos with different tags
Step 5: Design and 3D print prototype fingers with servo mounts
Step 6: Revise design to use springs as joints
Step 7: Combine servos, RFID Antenna, 3D printed parts and Arduino.
Guino
“Guino” is a free Arduino Dashboard that allows a user to send information from the Arduino board, over the serial port and view this information on a host computer. This program shows the current position of each servo motor, the unique tag number identified by the RFID antenna and the action (“function” in the arduino sketch) that is linked to that tag. This dashboard need not be connected to the prosthetic, but allows a convenient means of illustrating the microcontroller actions.
Results
Each of three tags was brought close to the RFID Antenna, 100 times. The number of times that the system correctly identified the tag number and correctly executed the appropriate function were recorded in tabular form. For these 300 separate tests, there were zero incorrect tag identifications and 100% success in executing the appropriate function in the Arduino sketch (embedded microcontroller). For this series of tests, the antenna, microcontroller and servo motors performed reliably. The finger design is unique to this project. The mechanical properties of the “spring” joints can be changed by using different springs, varying the length of the springs between the segments or by using more than one spring in the joint.
Conclusion
This project has demonstrated that it is possible to offload neuromechanical control for complex movements to an RFID enabled prosthetic device. An embedded microcontroller correctly identifies several unique RFID tags.
Each RFID tag, when identified by the embedded microcontroller, is able to trigger a specific function in the Arduino script which in turn controls the movement of 5 separate servo motors in the prostatic hand. This project demonstrates that complex movements corresponding to tasks such as “grasp”, “pinch”, and “count” are easily and reliably achievable.
Embedding “Capsule RFID tags” in the tips of each prosthetic finger, would allow an interactive work station to identify at least 5 different, unique, RFID signals and respond accordingly to the presence of the prosthetic device.
This project has used the free “Guino” serial report monitor to display the interactive data stream between the RFID antenna, various types of RFID tags, the embedded microcontroller, and the Servo motors.
Summary: This project demonstrates a potentially useful approach to offloading neuromechanical interface control for both complex object manipulation and globally assistive prosthetic applications.
Future Applied Research and Development
Temperature and Hall effect sensor (magnetic fields)
Individual human scanned and 3D printed prosthetics
2-3 axis tilt sensor for release and pick up
2-3 axis accelerometer for speed and direction
Capacitive Touch sensor for direct computer interface
Infra Red (IR) proximity sensor
Position sensing servos, “inverse kinetic” training
RFID Capsules in finger tips for workstation interactions
Wi-Fi prosthetic to prosthetic and remote between people
Smart phone “App” reprogramming and QR code reader
NFC Near Field Communication between limbs (walking)
This high school science project was overseen by:
Dr. R. Siderits at RWJUHH
Awards
The United States Air Force: Certificate of Achievement for an Outstanding Science and Engineering Fair Project
Intel Excellence in Computer Science Award: for outstanding achievement in the category of Computer Science at the Mercer Science and Engineering Fair
The Yale Science and Engineering Association Inc. Award: for Most Outstanding Exhibit in Computer Science, Engineering, Physics, or Chemistry
The Rider University Award: for the Most Superior Project
First Place award in the Computational Biology and Bioinformatics of the 2015 Mercer Science and Engineering Fair
Grand Prize of the 2015 Mercer Science and Engineering Fair
Similar models
thingiverse
free

Enclosure Box for your Arduino RFID-Project by kavasmlikon
...ot design with cutouts for an interlocking t-bolt construction to stabilize the box using 3mm x 10mm machine screws and 3mm nuts.
thingiverse
free

9g Servo Light Switch Flipper by willreale
...rews overtop any standard light switch. attach a servo and plug it into a microcontroller like an arduino for a fun easy project!
thingiverse
free

HEXRO - 12-servo-motors hexapod robot by Naus
...d robot by naus
thingiverse
hexro is a small hexapod robot designed to work with any microcontroller and servo motor controller.
thingiverse
free

Arduino-based Electronic Lock by ridercz
...d:
arduino nano (or basically any arduino, but the holder is designed for nano)
oh3144 hall sensor
sg90 servo
4x4 matrix keyboard
thingiverse
free
Arduino Uno by Charles3rd
...to meet. the bar was named after arduin of ivrea, who was the margrave of the march of ivrea and king of italy from 1002 to 1014.
thingiverse
free

DrawBot by Alexey_Butov
... for arduino uno for drawbot control.
db_step_v5.dwg, db_step_v5.dxf - files for laser cut.
manual.pdf - 3 step assembly manual.
thingiverse
free

BiCopter Stand and Motor plate for Servo control by k2345777
... stand and motor plate which can be moved by servo.
with arduino nano and gy-87(10 dof sensors) which soldering on the peg board.
thingiverse
free
Arduino Servo Calibration Box
...arduino servo calibration box
thingiverse
this is a project to design a standalone arduino uno box for calibrating servo motors
thingiverse
free

wifi enabled rfid rc522 tag door lock (Arduino pro mini 3.3v + rc522 mifare rfid + ESP8266 wifi ) by henriquejrcosta
... what i have done till now, maybe it will help someone ;) . any questions just send it and i will try to answer soonest possible!
thingiverse
free

Servo Motor Wheel by ShrikarCC
...y shrikarcc
thingiverse
need to place servo in the correct places in the arduino and use the potentiometer to control the servo.

Multiplexed
thingiverse
free

Multiplex Green connector Support Supporto a parete connettore multiplex by malpom
...rto a parete connettore multiplex by malpom
thingiverse
multiplex green connector support supporto a parete connettore multiplex
thingiverse
free
Gemini multiplex motor mount V2 by romero
...es: multiplex mentor, multiplex funcub, multiplex easy cub, multiplex acromaster, multiplex parkmaster 3d, multiplex dog fighter.
thingiverse
free

tapa conector multiplex by Santisbracing
...tapa conector multiplex by santisbracing
thingiverse
proteccion par aconector multiplex anti cortocircuitos
thingiverse
free

Gemini multiplex motor mount V1 by romero
...es: multiplex mentor, multiplex funcub, multiplex easy cub, multiplex acromaster, multiplex parkmaster 3d, multiplex dog fighter.
thingiverse
free

Multiplex Montagerahmen by XYZDesignHM
...multiplex montagerahmen by xyzdesignhm
thingiverse
extrudr petg material .
thingiverse
free

Multiplex Mentor RC Motor Mount by tapps
...multiplex mentor rc motor mount by tapps
thingiverse
motor mount for multiplex mentor and other multiplex rc aircrafts.
thingiverse
free

Multiplex Mentor Wing Bracket by Nicke80
...multiplex mentor wing bracket by nicke80
thingiverse
wing bracket for the multiplex mentor rc airplane
thingiverse
free

Minimag Multiplex ski by Dypsyprinter
...er
thingiverse
simple ski for multiplex minimag . printed from pla on prusa mk3
print and then glue left and right side with ca
thingiverse
free

cone d'hélice Solius Multiplex by Alpin25
...cone d'hélice solius multiplex by alpin25
thingiverse
pièce de remplacement pour motoplaneur solius de multiplex.
thingiverse
free

Multiplex Mentor wing-holder by FreaklyFPV
...r by freaklyfpv
thingiverse
two of these connectors hold the screws on the multiplex mentor wing and in some crashes they brake.
Prosthetic
thingiverse
free

Prosthetic arm
...prosthetic arm
thingiverse
prosthetics arm
3d printable
thingiverse
free

Prosthetic Arm
...prosthetic arm
thingiverse
a prosthetic arm purely for asthetic purposes. it was made for a client's wedding.
thingiverse
free

Dog Prosthetic by 3DESIGNER27
...animal allies. cheap alternative for dog prosthetic limb. scale in your slicer to fit the dog you are looking to apply prosthetic
thingiverse
free

XOR Prosthetic Hand by chandlersupple
...xor prosthetic hand by chandlersupple
thingiverse
prosthetic hand - two part
thingiverse
free
python prosthetic by SamBautistaEatsDog
...ver arm they like. the friction fit will allow the utensil to stay in place. for the assembly, go to https://youtu.be/ltjvqbdkdhi
thingiverse
free
prosthetic finger by fingerless1
... prosthetic.
designed this to give me some use of my middle finger that was surgically amputated due to tendon and nerve damage.
thingiverse
free

Prosthetic Paw by GabeRomero
...thetic paw for general purpose, i tried to keep the design as versatil as possible, keep an eye on my creations for more designs.
thingiverse
free

prosthetic foot v0.1 by Zerberos
...rosthetic foot v0.1 by zerberos
thingiverse
this is a idee of a prosthetic foot.
i ask for suggestions and comments
thx
zerberos
thingiverse
free

Computer Mouse Prosthetic Attachment by Garrettspu
...r a prosthetic hand developed here at spu. it attaches to the prosthetic and allows the user to operate a computer mouse with it.
thingiverse
free

Prosthetic Sling Shot by BK95
...sling shot by bk95
thingiverse
this slingshot is to function on a prosthetic.
printing:
0.4 nozzle, 0.2 layer height, 20% infill
Devices
thingiverse
free
The Device by eanator
...-printing in the world of tomorrow. behold the device! countless applications and innovations await you. the device calls to you.
thingiverse
free

Flyway Device by gesheit1325
...flyway device by gesheit1325
thingiverse
that is my device
thingiverse
free

Flyway Device by gesheit1325
...flyway device by gesheit1325
thingiverse
this is flyway device
thingiverse
free

Centering device by fransni
...centering device by fransni
thingiverse
this is an centering device.
thingiverse
free

device holder by Qwifan
...device holder by qwifan
thingiverse
device holder is awesomely made
thingiverse
free

drilling device by vladac
...drilling device by vladac
thingiverse
drilling device (mock-up)
thingiverse
free

Device Stand by JeremySant
...device stand by jeremysant
thingiverse
a very rough idea for a device stand.
thingiverse
free
Device Holder by PoniButtz
...device holder by ponibuttz
thingiverse
put your device on the object and watch a movie.
thingiverse
free

Muzzle Device
...zle device with 1/2"-28 threads. only use on low pressure applications such as airsoft or pellet guns. use at your own risk.
thingiverse
free

Colostomy Device by Phelps3D
...type device as sometimes my cycle of ordering the devices has...