Thingiverse
Monobot, the single servo robot
by Thingiverse
Last crawled date: 4 years, 3 months ago
How many motors do you need to make a robot which can move in 2 dimensions? Most need 2, either left-right differential like a tank, or one for going forward and one for steering, like cars. There are experiments to achieve steerable robots using just one actuator, notable ones are the 1STAR from UC Berkeley (which has 6 legs, the middle legs are elastic) and the Monospinner from ETH Zurich (which can even fly), but they require complex and delicate mechanisms and control systems.
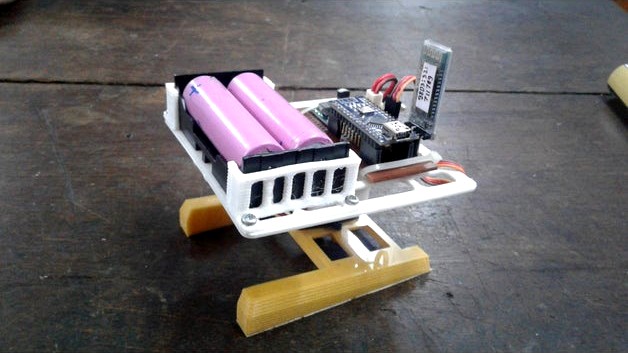
Introducing Monobot, the single servo robot. This robot has only 2 parts, the base and the foot, which are connected by a servo motor. But how could this robot move?
The key is center of mass, friction, and acceleration. The mass of the robot is located on the upper part ('the body') and is offset to the front, near the batteries. When the motor is accelerating to one direction, normal force (N) on one side of the foot is greater than the other, and since static friction limit (fsmax) is proportional to N, then one side will have more tendency to slip and 'steps' forward. By accelerating to left and right repeatedly, the robot will move forward... ideally. If the foot sides have dissimilar friction constant, because imperfect surfaces, the robot will veer off from straight line. But you can make the robot turn around in spot (which 1STAR cannot) by moving the motor to one direction slowly then suddenly reversing, so the body which has larger inertia will continue rotating that way, but the foot slips. You can see the demonstration in the video.https://www.youtube.com/watch?v=g27qqC4I8kU
Print the base, battery holder holder, and choose a foot (I used 5 degrees, haven't tried the others, but Blender Rigid Body simulation shows that higher angle gives faster movement), screw the servo horn to the foot using servo mounting screws, put your favourite controller (I used Arduino Nano and Bluetooth receiver), 2x 18650 batteries and battery holder, a 5V step down converter for the servo (I don't like powering servos through the nano's regulator), and there you are, a robot as simple as could be.
I suggest using high quality servo, preferably metal gear, since this robot will put high stress on the gears, motor, and motor driver from the repetitive direction reversing. I haven't broken any servo though.
Friction is important here. Slippery PLA only produce little movement, so I covered the foot with masking tape. I measured the coefficient of friction on wood, the result is about 0.4. Too high friction and the robot jumps around or topple.
Arduino code included.
How could you improve the performance of this robot?
Introducing Monobot, the single servo robot. This robot has only 2 parts, the base and the foot, which are connected by a servo motor. But how could this robot move?
The key is center of mass, friction, and acceleration. The mass of the robot is located on the upper part ('the body') and is offset to the front, near the batteries. When the motor is accelerating to one direction, normal force (N) on one side of the foot is greater than the other, and since static friction limit (fsmax) is proportional to N, then one side will have more tendency to slip and 'steps' forward. By accelerating to left and right repeatedly, the robot will move forward... ideally. If the foot sides have dissimilar friction constant, because imperfect surfaces, the robot will veer off from straight line. But you can make the robot turn around in spot (which 1STAR cannot) by moving the motor to one direction slowly then suddenly reversing, so the body which has larger inertia will continue rotating that way, but the foot slips. You can see the demonstration in the video.https://www.youtube.com/watch?v=g27qqC4I8kU
Print the base, battery holder holder, and choose a foot (I used 5 degrees, haven't tried the others, but Blender Rigid Body simulation shows that higher angle gives faster movement), screw the servo horn to the foot using servo mounting screws, put your favourite controller (I used Arduino Nano and Bluetooth receiver), 2x 18650 batteries and battery holder, a 5V step down converter for the servo (I don't like powering servos through the nano's regulator), and there you are, a robot as simple as could be.
I suggest using high quality servo, preferably metal gear, since this robot will put high stress on the gears, motor, and motor driver from the repetitive direction reversing. I haven't broken any servo though.
Friction is important here. Slippery PLA only produce little movement, so I covered the foot with masking tape. I measured the coefficient of friction on wood, the result is about 0.4. Too high friction and the robot jumps around or topple.
Arduino code included.
How could you improve the performance of this robot?
Similar models
thingiverse
free

Robotic drawing arm by Gabgau
...so any model will work. i put the file for the code and you got more specification in it, it's a mashup of a lot of projet...
thingiverse
free

Grab for robotics and other (using 2x servo motor 9g) by fabiam93
... other (using 2x servo motor 9g) by fabiam93
thingiverse
simple grab for robotics. i used 2 servo motor in order to move 2 arms.
cg_trader
free

Coordination with servo motors
...rs. it works with sketchyphysics. to move use the arrow keys. technology coordination with servo motors vehicle part vehicle part
grabcad
free

Robot Gundam TR6's Body (first week version)
...d
because as a robot it needs servo motor to move its arm, i have to create an extra structure at its shoulder to put the motor.
thingiverse
free

Arduino Walker-Bot by MakerZoo
...ard but showed users how to wire up a joystick, power switch, batteries and servos to an arduino and then program it all to work.
thingiverse
free

BiCopter Stand and Motor plate for Servo control by k2345777
... stand and motor plate which can be moved by servo.
with arduino nano and gy-87(10 dof sensors) which soldering on the peg board.
thingiverse
free

RoBox , 3d printed walking robot, moving Arms, Head and meter. by RobotHut
...t all the same , so the new motor gear has the d slot all the way threw the gear so it can slip all the way onto the motor shaft.
thingiverse
free

Minimum Robot Steering/Speed Control by TimboInSpace
...on the battery platform. the unit doesn't have very much for clearance from the floor, so make sure it's mounted upright.
thingiverse
free

peon230 Battery Holder by unprovoked
... in the x and y direction.
i strongly recommend printing at 100%, since it is pretty minimal in dimensions as it is. i used pla.
thingiverse
free

Easy to build robot - Wendell the Robot by marc_cryan
...n inkscape.
parts -
plywood body
5 servo motors (2 are continuous)
arduino 1
batteries
a little servo board
thanks for looking!!
Servo
turbosquid
$30

Servo
...d model servo for download as obj, blend, dae, stl, and sldpr on turbosquid: 3d models for games, architecture, videos. (1394011)
3d_export
$5

servo motor
...tor
3dexport
it's a simple part of servo motor 0.75kw for used in machines assembly to show specified motor in own project.
turbosquid
$1

Servo Moter
...quid
royalty free 3d model servo moter for download as blend on turbosquid: 3d models for games, architecture, videos. (1650816)
turbosquid
free

Motor/Servo
...osquid
royalty free 3d model motor/servo for download as obj on turbosquid: 3d models for games, architecture, videos. (1522522)
turbosquid
$60

Servo Skull
...
royalty free 3d model servo skull for download as ma and fbx on turbosquid: 3d models for games, architecture, videos. (1318573)
3d_export
$5

Servo 3D Model
...rvo 3d model
3dexport
servo
servo 3d model download .c4d .max .obj .fbx .ma .lwo .3ds .3dm .stl pasqualesiciliano 104590 3dexport
turbosquid
$50

Servo Motor
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$49

Servo Motor
...model servo motor for download as 3ds, max, obj, fbx, and stl on turbosquid: 3d models for games, architecture, videos. (1324153)
turbosquid
$29

Servo Set
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10

machine servo
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Single
3d_export
$5

single sofa single chair
...single sofa single chair
3dexport
single sofa single chair 3d model
3d_export
$5

single sofa single chair
...single sofa single chair
3dexport
single sofa single chair 3d model
3d_export
$5

single fastener
...single fastener
3dexport
single fastener
3ddd
$1

Single FLOU
... sofa , трансформер
диван-трансформер single от итальянского производителя flou
3ddd
$1

bed single
...bed single
3ddd
постельное белье
bed single 190cm*90cm
3ddd
$1

Single Flou
...single flou
3ddd
качественная моделька дивана-трансформера single flou.
3d_ocean
$9

Single sofa
...le sofa
3docean
modern sofa single sofa sofa white sofa.comfortable sofa
single sofa,sofa,modern sofa,white sofa.comfortable sofa
3d_export
free

Single Knife
...single knife
3dexport
a single knife, presumably it was used as one of the throwing knives.
3d_export
free

couch - single
...couch - single
3dexport
low poly single couch with .psd file for personal customization
3d_ocean
$5

Single Sofa
...single sofa
3docean
single sofa made by fabric , wood frame & ss leg