Thingiverse
Homemade Table Tennis Robot - remix by bbogdanmircea
by Thingiverse
Last crawled date: 3 years ago
16.02.2019
Added the project to github.
https://github.com/bbogdanmircea/Ping-Pong-Robot-BOB
You can find the code that I used there.
22.09.2018
Hello, unfortunately because of some job related problems, I had to give away the table and pack the robot as probably I will have to move soon .
So I am afraid no progress will be made in the next months .
I am happy to support with any information if somebody is working on the same robot .
As soon as my situation gets better I will get back to it .
17.08.2018
Added videos with Banebot wheels and improved stepper support :
https://youtu.be/ayka_9WWK08
https://youtu.be/4J9OeD_G4EI
https://youtu.be/0Lg4ioItwHg
10.03.2018
First garage tests :
https://youtu.be/bwohv99UVjI
https://youtu.be/Mkyyd9nZV4M
https://youtu.be/ovS_viEor4w
https://photos.app.goo.gl/MD8N9wMlSnhrU9b23
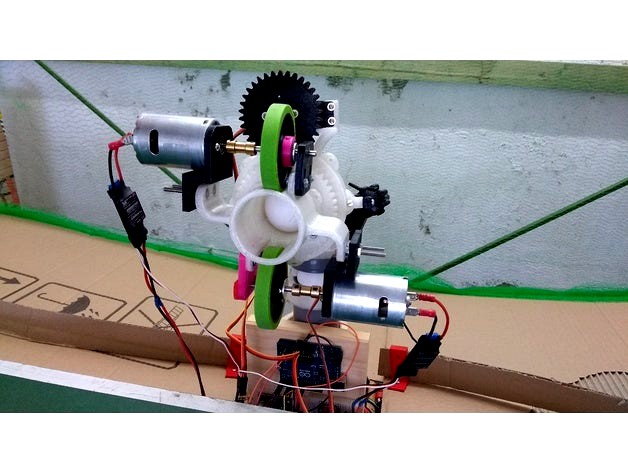
This is a remix of the Table Tennis Robot from instructables :https://www.instructables.com/id/Homemade-table-tennis-robot/
The original printed parts can be found here, many of them are used, but what I changed was :
-There is some different type of DIN50 PVC pipe and connectors, so I made some adapter parts when the original ones would not fit to what I bought, this can vary greatly based on the shop .
-The feeder is no longer using the piston and a servo, instead it is using a disc (designed by informer from rhcforum.ro) which is rotated by a stepper controlled by Arduino via an stick driver like the ones used in RAMPS board for 3D printer
-The motors, I changed from the BLDCs used originally to the Mabuchi RS-540 from hobbyking, this is a very cheap, very powerfull motor, also I used 20 A brushed ESCs from Hobbyking which are also very cheap
-The wheels, I used some aluminium hub rubber wheels which are normally used for landing gear on jets on hobbyking, also a 4 mm shaft and bearing si needed and also an axle adapter from 3.17 mm to 4 mm (I also tried printed wheels with 40 mm orings as rubber, but no success, they have horrible vibration, still the stl is available)
-The rotation mechanism for the head is changed, this is based on alvinchua's design from instructables, it is a gear based rotation so no belt is needed
-The original software was taken and then it was changed in order to control the stepper and the new ESCs . Also a BT module was added and an application for Android was made in order to control the robot
Here are the links to the alternative parts that I used :
The parts that I use will work with some additional printed parts and hardware that I listed into my project .
Hope this helps you .
https://hobbyking.com/en_us/turnigy-20a-brushed-esc.html
https://hobbyking.com/en_us/mabuchi-rs-540sh-6527-brushed-motor-90w.html
https://hobbyking.com/en_us/turnigy-scale-jet-alloy-wheel-54mm-w-rubber-tire.html
https://hobbyking.com/en_us/ball-bearing-4x7x2-5-bsr-racing-bz-444-or-444-pro-1-10-4wd-racing-buggy-6pcs.html
https://hobbyking.com/en_us/ntm-prop-drive-3530-series-replacement-shaft.html
https://hobbyking.com/en_us/brass-motor-transmission-connector-4mm-3-17mmxd9xh20mm-5pcs.html
Added the project to github.
https://github.com/bbogdanmircea/Ping-Pong-Robot-BOB
You can find the code that I used there.
22.09.2018
Hello, unfortunately because of some job related problems, I had to give away the table and pack the robot as probably I will have to move soon .
So I am afraid no progress will be made in the next months .
I am happy to support with any information if somebody is working on the same robot .
As soon as my situation gets better I will get back to it .
17.08.2018
Added videos with Banebot wheels and improved stepper support :
https://youtu.be/ayka_9WWK08
https://youtu.be/4J9OeD_G4EI
https://youtu.be/0Lg4ioItwHg
10.03.2018
First garage tests :
https://youtu.be/bwohv99UVjI
https://youtu.be/Mkyyd9nZV4M
https://youtu.be/ovS_viEor4w
https://photos.app.goo.gl/MD8N9wMlSnhrU9b23
This is a remix of the Table Tennis Robot from instructables :https://www.instructables.com/id/Homemade-table-tennis-robot/
The original printed parts can be found here, many of them are used, but what I changed was :
-There is some different type of DIN50 PVC pipe and connectors, so I made some adapter parts when the original ones would not fit to what I bought, this can vary greatly based on the shop .
-The feeder is no longer using the piston and a servo, instead it is using a disc (designed by informer from rhcforum.ro) which is rotated by a stepper controlled by Arduino via an stick driver like the ones used in RAMPS board for 3D printer
-The motors, I changed from the BLDCs used originally to the Mabuchi RS-540 from hobbyking, this is a very cheap, very powerfull motor, also I used 20 A brushed ESCs from Hobbyking which are also very cheap
-The wheels, I used some aluminium hub rubber wheels which are normally used for landing gear on jets on hobbyking, also a 4 mm shaft and bearing si needed and also an axle adapter from 3.17 mm to 4 mm (I also tried printed wheels with 40 mm orings as rubber, but no success, they have horrible vibration, still the stl is available)
-The rotation mechanism for the head is changed, this is based on alvinchua's design from instructables, it is a gear based rotation so no belt is needed
-The original software was taken and then it was changed in order to control the stepper and the new ESCs . Also a BT module was added and an application for Android was made in order to control the robot
Here are the links to the alternative parts that I used :
The parts that I use will work with some additional printed parts and hardware that I listed into my project .
Hope this helps you .
https://hobbyking.com/en_us/turnigy-20a-brushed-esc.html
https://hobbyking.com/en_us/mabuchi-rs-540sh-6527-brushed-motor-90w.html
https://hobbyking.com/en_us/turnigy-scale-jet-alloy-wheel-54mm-w-rubber-tire.html
https://hobbyking.com/en_us/ball-bearing-4x7x2-5-bsr-racing-bz-444-or-444-pro-1-10-4wd-racing-buggy-6pcs.html
https://hobbyking.com/en_us/ntm-prop-drive-3530-series-replacement-shaft.html
https://hobbyking.com/en_us/brass-motor-transmission-connector-4mm-3-17mmxd9xh20mm-5pcs.html
Similar models
grabcad
free

Turnigy L2508A Brushless Motor.
...https://youtu.be/mfs7wisp_5u
turnigy l2508a motor: https://hobbyking.com/en_us/turnigy-l2508a-3500-brushless-heli-motor-200w.html
grabcad
free

Hobbyking D5035 and 6374 brushless motors
...m/en_us/dt6376-14p-sensored-motor-125kv.html
https://hobbyking.com/en_us/turnigy-sk8-6374-130kv-sensored-brushless-motor-14p.html
grabcad
free

Large 500mm EDF
...uses the rotomax 150cc motor from hobbyking https://hobbyking.com/en_us/turnigy-rotomax-150cc-size-brushless-outrunner-motor.html
thingiverse
free

Ducted Mini Drone 58mm by vicviper
...done, attach battery pack using a rubber band or similar edit: added an optional battery tray for the battery...
grabcad
free

RotorStar Outrunner - 2820-930KV
...r - 2820-930kv
grabcad
model of this motor from hobbyking
https://hobbyking.com/en_us/rotorstar-for-goblin-380-2820-930kv.html
grabcad
free

3D printed robot cat
...s
battery:
https://hobbyking.com/en_us/turnigy-nano-tech-1200mah-2s-15-25c-lipo-airsoft-pack.html
springs from a ballpoint pen
thingiverse
free

80 mm Tiny whoop quadcopter drone with FPV camera by Spudwood
...o-fpv-whip-antenna.html
batteryhttps://hobbyking.com/en_us/turnigy-nano-tech-500mah-1s-25-50c-lipo-pack-losi-mini-compatible.html
thingiverse
free

Durafly Curtiss P-40N Warhawk spinner by 3DBobCZ
...a new spinner for turnigy d3536/9 910kv (a motor similar to original). propeller is 3-blade 10x6.https://hobbyking.com/en_us/durafly-curtiss-p-40n-warhawk-1100mm-pnf.htmlhttps://hobbyking.com/en_us/turnigy-d3536-9-910kv-brushless-outrunner-motor.htmlhttps://hobbyking.com/en_us/skywalker-propeller-1060e.html edit 02/2018: you...
grabcad
free

Turnigy Aerodrive SK3 4250 350KV Brushless DC Motor
...50kv-brushless-outrunner-motor.html
https://hobbyking.com/en_us/turnigy-aerodrive-sk3-4250-350kv-brushless-outrunner-motor.html
thingiverse
free

3D printed robot cat by Hartvik
...en_us
battery:https://hobbyking.com/en_us/turnigy-nano-tech-1200mah-2s-15-25c-lipo-airsoft-pack.html
springs from a ballpoint pen
Bbogdanmircea
thingiverse
free

Raspberry Pi 4 case - Corrected_SSD_remix by bbogdanmircea
...raspberry pi 4 case - corrected_ssd_remix by bbogdanmircea
thingiverse
added a support for an ssd under the case
thingiverse
free
13mm nut top joinder 8_3mm by bbogdanmircea
...13mm nut top joinder 8_3mm by bbogdanmircea
thingiverse
made a version for 8 mm metric nut
thingiverse
free

Printrbot Direct Drive Support for E3D by bbogdanmircea
...bbogdanmircea
thingiverse
this is for mounting an e3d to a plastic printrbot.
carriage should be upside down.
not tested yet ...
thingiverse
free

Printrbot direct drive extruder tick version by bbogdanmircea
...ruder tick version by bbogdanmircea
thingiverse
i edited the original design and made ticker arm and body .
also it is mirrored.
thingiverse
free

Servo arm connector by bbogdanmircea
...the link if you want to modify it
use m3 wood screw to tap on servo arm
use m3 screw and nut to connect to ball joint bottom part
thingiverse
free
Hypercube minebea 17pm-j503-p2st flange Z support by bbogdanmircea
...ypercube minebea 17pm-j503-p2st flange z support by bbogdanmircea
thingiverse
this is a z support for a minebea flanged motor .
thingiverse
free

C5W Led Lamp by bbogdanmircea
...a led strip that consumes around 30ma, compared to 1a for the bulb lamp.
the design is available in onshape as a public document.
thingiverse
free

Hypercube Igus JFRM-M-01-TR8x1.5 Bed Nut Support by bbogdanmircea
...hypercube igus jfrm-m-01-tr8x1.5 bed nut support by bbogdanmircea
thingiverse
works ok for this kind of bushing and screw .
thingiverse
free

Table Tennis Net Support by bbogdanmircea
...m, but they are too wobbly so only the top wire guide will rotate .
it's still not fully tested .
please feel free to remix .
thingiverse
free

E3D direct to bowden clamp adapter Hypercube by bbogdanmircea
...er which i want to mount on the hypercube carriage .
so i made this adapter .
thread for the bowden coupler is 9.25 mm diameter .
Homemade
turbosquid
$14

Homemade Cup
... free 3d model homemade cup for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1530055)
turbosquid
$12

Homemade Bread
...ree 3d model homemade bread for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1593685)
turbosquid
$10

Homemade Based Gun
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$4

Homemade Gaming Table
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$59

Electric Homemade Morgenstern
... morgenstern for download as max, max, max, max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1708709)
turbosquid
$15

Homemade Chocolates(8 types)
...e 3d model homemade chocolates(8 types) for download as blend on turbosquid: 3d models for games, architecture, videos. (1214642)
turbosquid
$5

Homemade Axe (High Poly)
...ty free 3d model homemade axe (high poly) for download as obj on turbosquid: 3d models for games, architecture, videos. (1209323)
3d_export
$10

homemade knife
...nife
3dexport
all textures in the png extension (2k, pbr). number of polygons 6980. file formats: fbx, obj, stl, max, mb, blend.
turbosquid
$15

Homemade metal sauna stove
...made metal sauna stove for download as max, obj, fbx, and dwg on turbosquid: 3d models for games, architecture, videos. (1577773)
turbosquid
$9

Homemade guide screw module
...e guide screw module for download as 3ds, ige, obj, and sldas on turbosquid: 3d models for games, architecture, videos. (1224566)
Tennis
3d_ocean
$3

Tennis Ball
...tennis ball
3docean
ball tennis tennis ball
a gorgeous red and yellow seamless tennis ball
turbosquid
$29

Tennis Racket and Tennis Ball
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$15

Tennis
...oyalty free 3d model tennis for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1480642)
turbosquid
$30

Tennis
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$12
TENNIS
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_ocean
$10
![[Tennis series] Low-poly tennis court](/t/579509.jpg)
[Tennis series] Low-poly tennis court
... texture detail. it has the precise measurements of a real tennis court and net. the polygon count is just 856! all the elemen...
turbosquid
$98

Sports Tennis Girl Model with Tennis Court
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$19

tennis ball
...tennis ball
3dexport
3d_export
$12

tennis shoes
...tennis shoes
3dexport
turbosquid
free

Tennis Ball
...all
turbosquid
free 3d model tennis ball for download as max on turbosquid: 3d models for games, architecture, videos. (1482300)
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot
Remix
turbosquid
$5

MODA Collection Remix Chair
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$12

remix yamaha rm1x
...remix yamaha rm1x
3dexport
geometry triangles 15.2k vertices 7.6k pbr no textures 1 materials 1 uv layers yes
3d_ocean
$5

Vray fabric Kvadrat remix green - tileable
...th vray and 3dsmax. high-resolution texture images (2000×2000 px) file included: shader vray 2.40 texture image 3ds max 2011 file
turbosquid
$20

Gerrit Rietveld 1938 Zig Zag Chair Remix
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

multicolored remix parametric table furniture
... fbx, obj, mtl, archive with textures. the model has no glitches. render and materials - vray . without using plugins. good use!
3ddd
$1

Barovier&Toso / Manhattan Remix 7192
... 004293-142405
в коллекции есть люстры 7, 9, 12 рожковые. диаметр соответственный 1000, 1250, 1500 мм.
3ddd
$1

Muuto fiber chair
...grey/grey, dusty green/dusty green, nature/oak, natural white/oak upholstery options remix 183/black, remix 133/grey, remix 643/dusty red leather options black...
3ddd
$1

Barovier&Toso 7190-7195
...7190-7195 3ddd barovier&toso потолочнай люстра фабрики barovier&toso;, коллекция manhattan remix артикул 7190-7195. размеры в inches: 39"...
3d_export
$5
3D Locking Handle Weatherproof Storage Box Container
...handle weatherproof storage box container 3dexport new, improved and remixd! no screws required. print-in-place. weatherproof. parametric. 2 parts. easy...
cg_studio
$49

HTC One Mini 2 Amber Gold3d model
...cell phone mobile cellular super lcd touchscreen touch screen remix amber gold .max .obj .mb .lwo .fbx .c4d .3ds...
Table
3ddd
free

Table
...table
3ddd
table
table
archibase_planet
free

Table
...table
archibase planet
table glass-table round table glass table
table n240311 - 3d model (*.3ds) for interior 3d visualization.
archibase_planet
free

Table
...e
archibase planet
table dining-room table dinner table round table
table - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_export
$5

table
...table
3dexport
table classic-table
archibase_planet
free

Table
...se planet
table glass table round table glass-table
table tonin habitat n280111 - 3d model (*.3ds) for interior 3d visualization.
archibase_planet
free

Table
...table
archibase planet
table dining-room table dinner table
table - 3d model (*.3ds) for interior 3d visualization.
archibase_planet
free

Table
...table
archibase planet
table coffee table glass table
table - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Table
...table
archibase planet
table glass-table coffee table
table - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Table
...table
archibase planet
table writing table office table
table - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_ocean
$5

Table
...table
3docean
dining table furniture home kitchen table
simple wooden table.