Thingiverse

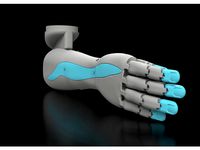
Flexy Hand Reloaded by Rhadamanthys76
by Thingiverse
Last crawled date: 3 years, 1 month ago
This is basically a mashup of 4 amazing designs already out there
The basic model is Flexy Hand 2, incoporated are Bob Roth's Gimbal mechanism, a slightly modified whipletree and the anchor from Shira's design
This is a specific variant (Left Hand thumbless) since its a model I've been working on for my daughter
Specifics of this design are as follows:
The Gimbal mechnism allows an additional degree of movement - Radial & Ulnar Deviation and in addition has the tendons routed through it so it wont press against the users skin when bending the wrist - this alos allows for more torque
Since my daughter is only 3 years old, I changed some of the geometry of the parts to reduce friction and also the index finger is slightly modified so it bends straight down
The design is made for using crimps for terminations (I'm using #1 single barrel fishing crimps)
The other change is the fingertips. The Lee Tippi microgel fingertips that e-NABLE hands use dont come in sizes this small, so I decided to experiment
The fingertips are in 2 parts. One to be printed in regular PLA
The second flexible portion is supposed to provide the grip without losing the original shape of the finger
Fingertips
These could be printed directly, however I only have access to Filaflex and its not tacky enough to provide grip. I've made the cuts straight to allow for printing in case there are any other filaments that could be used
The other option is to use the provided moulds. The moulds are made to use "pourable" material. I have experimented with Smooth-on's Mold Star 15 and had excellent results, the tips come out really soft and tacky (Shore Hardness of 15A versus Filaflex @ 85A)
I tried to make the hinges with the same material but its too soft - I'm waiting for an order of Moldstar 30 (which is slightly harder) to test that out
Silicone works brilliantly for this application and its extremely durable, the only down side I found to this particular brand was that the color cant be changed, its a greenish cyan color - If anyone knows of better pourable silicone for this, I'll be happy to hear suggestions
The other experiment I have pending in this regard is using gelatin mixes to see how that comes out - I'm a little concerned about the low melting point however, if anyone knows of anything you can add to the mix to raise the temp, I'd love to hear about it
Assembly
The Gimbal is spread slightly and slid onto the palm till the pins on the palm pop into place
The Gauntlet is inserted into the gimbal and the printed pin goes in from the top
The Whippletree top (2 pieces) slide into the bottom and a pin is inserted to keep it in place (I sized the holes to dowel pins I had but you could change that and use a paper clip and snip off the excess)
The bottom of the whippletree is tied to a cable, the end of the cable has a crimp that goes through the hole at the base of the gauntlet and wraps around the anchor that you can use to adjust
Each tendon has a crimp at one end that sits in the groove in the fingertip - glue or melted PLA keeps it in place well
The tendon lines are routed through the fingers, palm, gimbal, go through the upper whippletree and terminate in another crimp
Source Files
I've included the Solidworks files used as well as the original Flexy hand SW models (only the left hand thumbless variant though)
The basic model is Flexy Hand 2, incoporated are Bob Roth's Gimbal mechanism, a slightly modified whipletree and the anchor from Shira's design
This is a specific variant (Left Hand thumbless) since its a model I've been working on for my daughter
Specifics of this design are as follows:
The Gimbal mechnism allows an additional degree of movement - Radial & Ulnar Deviation and in addition has the tendons routed through it so it wont press against the users skin when bending the wrist - this alos allows for more torque
Since my daughter is only 3 years old, I changed some of the geometry of the parts to reduce friction and also the index finger is slightly modified so it bends straight down
The design is made for using crimps for terminations (I'm using #1 single barrel fishing crimps)
The other change is the fingertips. The Lee Tippi microgel fingertips that e-NABLE hands use dont come in sizes this small, so I decided to experiment
The fingertips are in 2 parts. One to be printed in regular PLA
The second flexible portion is supposed to provide the grip without losing the original shape of the finger
Fingertips
These could be printed directly, however I only have access to Filaflex and its not tacky enough to provide grip. I've made the cuts straight to allow for printing in case there are any other filaments that could be used
The other option is to use the provided moulds. The moulds are made to use "pourable" material. I have experimented with Smooth-on's Mold Star 15 and had excellent results, the tips come out really soft and tacky (Shore Hardness of 15A versus Filaflex @ 85A)
I tried to make the hinges with the same material but its too soft - I'm waiting for an order of Moldstar 30 (which is slightly harder) to test that out
Silicone works brilliantly for this application and its extremely durable, the only down side I found to this particular brand was that the color cant be changed, its a greenish cyan color - If anyone knows of better pourable silicone for this, I'll be happy to hear suggestions
The other experiment I have pending in this regard is using gelatin mixes to see how that comes out - I'm a little concerned about the low melting point however, if anyone knows of anything you can add to the mix to raise the temp, I'd love to hear about it
Assembly
The Gimbal is spread slightly and slid onto the palm till the pins on the palm pop into place
The Gauntlet is inserted into the gimbal and the printed pin goes in from the top
The Whippletree top (2 pieces) slide into the bottom and a pin is inserted to keep it in place (I sized the holes to dowel pins I had but you could change that and use a paper clip and snip off the excess)
The bottom of the whippletree is tied to a cable, the end of the cable has a crimp that goes through the hole at the base of the gauntlet and wraps around the anchor that you can use to adjust
Each tendon has a crimp at one end that sits in the groove in the fingertip - glue or melted PLA keeps it in place well
The tendon lines are routed through the fingers, palm, gimbal, go through the upper whippletree and terminate in another crimp
Source Files
I've included the Solidworks files used as well as the original Flexy hand SW models (only the left hand thumbless variant though)
Similar models
thingiverse
free

Cathy's Lucky Fin - Prosthetic Hand - Bowden / Push-Pull Variant by Rhadamanthys76
...to slide the joints in. 5% infill works great similary, the gimbal is spread slightly and slid onto the...
thingiverse
free

e-NABLE Phoenix Hand v2 - Thumbless by Yair_Herbst
...o fit only 4 fingers.
the design was made as part of the work we do in haifa3d (the israeli chapter of e-nable) and the technion.
thingiverse
free

Flexy-Hand 2 by Gyrobot
...re : http://youtu.be/ceyzskznnpy thanks to 3duniverse and jeremy simon
.http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Talon Hand Lightweight Gauntlet by Gyrobot
...fastener.
let's e-nable the future to be better for some people.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Flexy-Hand - Filaflex Remix by Gyrobot
...n for his recommendations and consultation along this design process.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Alien Hand by LoboCNC
...racefully will take a bit of practice! i'm hoping some clever soul will print their own and hook it up to rack of rc servos.
thingiverse
free

e-NABLE Phoenix Hand v2 by EnableCommunityFoundation
...b to wear the hand and operate it.
wrist pin - this pin has been shortened to allow it to be used with the thermoformed gauntlet.
thingiverse
free

Flexy-Fingers by Gyrobot
...see videos :http://youtu.be/0wn6esb6bvmhttp://youtu.be/e1w0hva3hqs ?
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Phoenix Smooth by 1d1
... excellent work on the phoenix hand, but they deserve it! here is the full attribution address: www.thingiverse.com/thing:1453190
thingiverse
free

Snap Talon System Wrist Actuated by 1d1
... snap in place so there are no additional pins, hinges, etc. will fit most printers and prints cleanly on a well adjusted system.
Rhadamanthys76
thingiverse
free

The Lucky Paw Prosthetic Hand by Rhadamanthys76
...7715636887179986
for more information and amazing stories:http://enablingthefuture.orghttps://www.facebook.com/enableorganization
thingiverse
free

Cathy's Lucky Fin V3 by Rhadamanthys76
... using this option), fingertips mould, gauntlet and tensioner
i used pla+, printed with 0.15 resolution, 25% infill and 2 shells
thingiverse
free
Cathy's Lucky Fin - Prosthetic Hand - Bowden / Push-Pull Variant by Rhadamanthys76
...the proximal joints o-ring groove to a dovetail shape for easier installation
uploaded all the cad files for the parts (sw 2014)
thingiverse
free

ArmPO v3 by poparaguay
...modificados a partir de la prótesis de mano de rhadamanthys76 esta versión cuenta con dos canales, uno para los...
thingiverse
free
Po Elbow (Beta) by poparaguay
...by editing gyrobot's flexyhand and cathy's lucky fin by rhadamanthys76 (see armpo v3)https://www.thingiverse.com/thing:2803120 fusion 360 public link: https://a360.co/2gkau47 for...
Flexy
turbosquid
$8

Lloytron Flexi Desk Lamp
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Стол-трансформер Calligaris Flexy
... трансформер
стол трансформер - от журнального до обеденногосайт фабрикиhttp://www.calligaris.it
turbosquid
$39

Cabinets Cappellini Flexi Container & Chair S-CHAIR
...exi container & chair s-chair for download as max and fbx on turbosquid: 3d models for games, architecture, videos. (1255772)
3d_export
$5

PIPPI HANGER by Midj
...hanger, an elastic visual fabric or elastic eco-leather (similpelle flexy - flexy faux leather) is...
3d_ocean
$13

Photoreal Wine Bottles -Type1-
... to customization and very detailed. the renderscene is included, it is a studio setup, with hot lights (5000+ kelvins). flexi...
thingiverse
free

Flexi Dachshund
...flexi dachshund
thingiverse
flex dachshund inspired by flexi cat which is inspired by flexi rex.
thingiverse
free
Dino flexi
...dino flexi
thingiverse
dino flexi
thingiverse
free
Flexi Unicorn
...flexi unicorn
thingiverse
flexi unicorn
thingiverse
free

Flexi Dolphin
...flexi dolphin
thingiverse
flexi spinner dolphin
pla
thingiverse
free

Flexi-dog
...flexi-dog
thingiverse
just a quick try at making a flexi.
Reloaded
3ddd
$1

Europeo / Reload
...ардероб
гардеробная. производитель europeo. модель reload.http://www.europeo.it/it/catalogo/notte/cabine-armadio/reload
turbosquid
$4

Reload Web Icon
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$50

Reloader DOOSAN DX225LCA MH
...ty free 3d model reloader doosan dx225lca mh for download as on turbosquid: 3d models for games, architecture, videos. (1304756)
turbosquid
$7

FPS Creator Reloaded Rock Pack 1
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5

reload icon
...max 2015,blender,cinema4d obj fbx stl warning:dont forget to active turbosmooth after final modeling. enjoy 3d modeling good luck
3d_export
$20

Tires 3D Model
...tires 3d model
3dexport
tires
tires 3d model qwerty-reloader 603 3dexport
3d_export
$10

Sparco 3D Model
...sparco 3d model
3dexport
sparco
sparco 3d model qwerty-reloader 620 3dexport
3d_export
$20

Audi TT 3D Model
...audi tt 3d model
3dexport
audi tt
audi tt 3d model qwerty-reloader 929 3dexport
3d_ocean
$15
Custom Sawed Off Shoot-Gun
...off shoot-gun 3docean 3ds animated editable gun max obj reloaded reloading shoot shoot-gun shootgun shooting textured weapon custom sawed...
3d_ocean
$25

Animated LowPoly Hand and AK-47
...eload. great for first person shooter on mibile device. max files are in 2011 and 2013 versions. fbx exported for unity engine...
Hand
3d_export
$8

hand
...hand
3dexport
fantasy hand
3d_export
$5

hand
...hand
3dexport
male hand
3d_export
$5

hand
...hand
3dexport
realistic male hand
3d_export
$5

hand
...hand
3dexport
hand with nails and structure
archibase_planet
free

Hand
...hand
archibase planet
hand
hand n190111 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3ddd
$1

Hand
...hand
3ddd
hand
модель руки будды
3d_export
$5

hand
...hand
3dexport
it is my wrist of hand and this is on 3d sculpt
3d_export
$5

hand
...hand
3dexport
realistic male hand obj file
3d_export
$7

hand-006 rigged hand
...hand-006 rigged hand
3dexport
rigged right hand 3d model additional textures for pbr rendering included
3d_ocean
$6

Hand
...
this 3d models of the hands, made in 3ds max, has textures(.jpg), materials(.mat), rigged, the models in .max, fbx, obj format.