GrabCAD
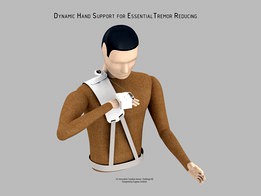
Dynamic Hand Support for ET Reducing
by GrabCAD
Last crawled date: 1 year, 11 months ago
This will be my second entry for the GrabCAD challenge:
https://grabcad.com/challenges/va-innovation-creation-series-challenge-2
Statistical research of essential tremor among people over 65 years old shows that the prevalence of disease reaches about 600 per 100 000 people. This means that disease affects tens of millions of people. Serious forms of essential tremor catastrophically affect on the coordination of voluntary movements of hands, making an everyday self-services difficult or impossible.In addition to pharmacotherapy, and more radical surgery, for many years now developments in the field of mechanical suppression of hand tremor using wearable mechanical devices are carried out. The most successful device (IMHO) is this smart spoon: http://www.liftware.com/
Yet, the most promising in terms of efficiency, is using of a hand exoskeleton with full control of kinematics. It seems that the kinematic complexity of the human hand raises this task as the difficult to achieve rank. Such devices are bulky, expensive and usually exist only at the stage of laboratory installations, such as this:
http://www.tremorjournal.org/article/downloadSuppFile/77/figure-77-1-raw
While searching for possible solutions, I was focused on the design of effective, but compromise, realizable and available by components and a price.
Also, the design should have a novelty in comparison with the existing solutions of the problem.
Existing methods of suppressing tremors involve the use of one or more joint orthoses, with damping motion in the joint. Usually, for efficient suppress of a hand tremor the solution must use ortheses in several joints - wrist, elbow, shoulder. The point of support in this case falls on the belt ties of joint orthoses.
What if to transfer the point of support of the hand directly on the shoulder by a flexible cord?
Implementation of the idea.
It is expected that developed device should work as a dynamic-controlled support with damping. The device allows to hold a hand by height in desired equilibrium position.
Of course the device will be efficient only if the cord is always tensioned. The cord tension must be maintained at a certain level in any arm position. For such a function is the simplest use of spool with a torsion spring. I believe that the strength of the spring should be comparable with the weight of a relaxed hand.
Also, to suppress the vibrations of arm, the cord spool must be damped. The suspension point of the palm should be as close as possible to the fingers.
In the simplest case, the device can be only passive.
The minimum set of components in this case is: the spool with a cord, torsion spring, a rotary damper, based on the dilatant fluid.
I think that using of dynamic damping is more perspective. The most perspective is the use of the damper based on a magnetorheological fluid. Magnetorheological damper (MR damper) has a high-speed control and high dynamic range of damping adjustment, from full off damping to full brake. In this case, the device become "smart" by also adding an electronic control unit with an accelerometer.
The device will be even more perfect if the force of the spring can be controlled dynamically. In this case, there must be added the following components: DC gear motor, cord tension sensor, cord spool revolution counter and spring revolution counter.
The cord is a thin round cloth, not prone to tangling, inextensible (e.g. from aramid fiber).
Such design of the device is shown in illustrations. To simplify, speed and spool-spring sensors not shown in the renderings.
It is assumed that in a properly configured device, the movement (lifting, lowering, and stopping the hand at a certain position) is only triggered by efforts of the flexor or extensor muscles, further uniform motion is performed automatically by winding or unwinding of the cord. Relaxed muscles of the driven hand can also provide an additional factor in reducing tremor. Of course such action for a person suffering from an ET might be unusual, and it will require additional training of a person and the device.
TECHNICAL REQUIREMENTS of the challenge do not envisage using of power source.
The proposed method for suppressing tremors do not completely rule out a passive device. But intelligent damping can serve as a key to a successful application. The energy of the battery is used sparingly and only for damping control. It is assumed that, and the device can work a weeks without recharging.
Damping behavior can be controlled intelligently by recognizing hand gestures via accelerometer. It can be easily realized with software algorithm in the electronic control unit. A similar method of controlling acceleration and deceleration is used in the well-known electric scooter Segway.
As fantastic function, device may be provided by voice control.
This function can be implemented using the Google Voice service, if it is additionally provided with a bluetooth module to connect to your smartphone. Of course this function requires a special application.
Examples of voice commands:
"Up" - lifting a cup of water to the mouth,
"Down" – putting down a cup on a table.
"Stop" - Stop arm at the desired height.
"Eating" - the periodic lifting and lowering hands.
"Key" - release hands to the height of the door keyhole.
The second part of the device is a point of support. The support point is realized as a corset with the tab on the shoulder area. On the tab placed a round groove with a magnet. The end of the cord is joined to a plastic ball with magnetic core. In such a construction it is assumed that a person suffering from ET will be available to attach and detach the cord singly.
The proposed method suppression tremor does not exclude placement of a support point elsewhere. For greater comfort, it may be placed on the left shoulder for a right hand or on a waist-belt. Also a support point may be mounted on the table edge by means of clip for tablecloth.
The most important part of the device - the algorithm of the electronic control unit may be the subject of additional scientific research and clinical trials.
_______
At the end I bring comic video of how it works.
Note: The video contains a short fragment of the Soviet satirical play "Energetic People" (1974)
This video excerpt shows "creativity" of a man suffering from alcoholic hand tremor when, he tries to drink a glass of whiskey. Video is humorous, but of course, I did not want to hurt people suffering from hand tremors.
https://www.youtube.com/watch?v=rWpXG530oY8
Special thanks to Cardero Carlos for ARTICULATED HUMAN BODY.
https://grabcad.com/challenges/va-innovation-creation-series-challenge-2
Statistical research of essential tremor among people over 65 years old shows that the prevalence of disease reaches about 600 per 100 000 people. This means that disease affects tens of millions of people. Serious forms of essential tremor catastrophically affect on the coordination of voluntary movements of hands, making an everyday self-services difficult or impossible.In addition to pharmacotherapy, and more radical surgery, for many years now developments in the field of mechanical suppression of hand tremor using wearable mechanical devices are carried out. The most successful device (IMHO) is this smart spoon: http://www.liftware.com/
Yet, the most promising in terms of efficiency, is using of a hand exoskeleton with full control of kinematics. It seems that the kinematic complexity of the human hand raises this task as the difficult to achieve rank. Such devices are bulky, expensive and usually exist only at the stage of laboratory installations, such as this:
http://www.tremorjournal.org/article/downloadSuppFile/77/figure-77-1-raw
While searching for possible solutions, I was focused on the design of effective, but compromise, realizable and available by components and a price.
Also, the design should have a novelty in comparison with the existing solutions of the problem.
Existing methods of suppressing tremors involve the use of one or more joint orthoses, with damping motion in the joint. Usually, for efficient suppress of a hand tremor the solution must use ortheses in several joints - wrist, elbow, shoulder. The point of support in this case falls on the belt ties of joint orthoses.
What if to transfer the point of support of the hand directly on the shoulder by a flexible cord?
Implementation of the idea.
It is expected that developed device should work as a dynamic-controlled support with damping. The device allows to hold a hand by height in desired equilibrium position.
Of course the device will be efficient only if the cord is always tensioned. The cord tension must be maintained at a certain level in any arm position. For such a function is the simplest use of spool with a torsion spring. I believe that the strength of the spring should be comparable with the weight of a relaxed hand.
Also, to suppress the vibrations of arm, the cord spool must be damped. The suspension point of the palm should be as close as possible to the fingers.
In the simplest case, the device can be only passive.
The minimum set of components in this case is: the spool with a cord, torsion spring, a rotary damper, based on the dilatant fluid.
I think that using of dynamic damping is more perspective. The most perspective is the use of the damper based on a magnetorheological fluid. Magnetorheological damper (MR damper) has a high-speed control and high dynamic range of damping adjustment, from full off damping to full brake. In this case, the device become "smart" by also adding an electronic control unit with an accelerometer.
The device will be even more perfect if the force of the spring can be controlled dynamically. In this case, there must be added the following components: DC gear motor, cord tension sensor, cord spool revolution counter and spring revolution counter.
The cord is a thin round cloth, not prone to tangling, inextensible (e.g. from aramid fiber).
Such design of the device is shown in illustrations. To simplify, speed and spool-spring sensors not shown in the renderings.
It is assumed that in a properly configured device, the movement (lifting, lowering, and stopping the hand at a certain position) is only triggered by efforts of the flexor or extensor muscles, further uniform motion is performed automatically by winding or unwinding of the cord. Relaxed muscles of the driven hand can also provide an additional factor in reducing tremor. Of course such action for a person suffering from an ET might be unusual, and it will require additional training of a person and the device.
TECHNICAL REQUIREMENTS of the challenge do not envisage using of power source.
The proposed method for suppressing tremors do not completely rule out a passive device. But intelligent damping can serve as a key to a successful application. The energy of the battery is used sparingly and only for damping control. It is assumed that, and the device can work a weeks without recharging.
Damping behavior can be controlled intelligently by recognizing hand gestures via accelerometer. It can be easily realized with software algorithm in the electronic control unit. A similar method of controlling acceleration and deceleration is used in the well-known electric scooter Segway.
As fantastic function, device may be provided by voice control.
This function can be implemented using the Google Voice service, if it is additionally provided with a bluetooth module to connect to your smartphone. Of course this function requires a special application.
Examples of voice commands:
"Up" - lifting a cup of water to the mouth,
"Down" – putting down a cup on a table.
"Stop" - Stop arm at the desired height.
"Eating" - the periodic lifting and lowering hands.
"Key" - release hands to the height of the door keyhole.
The second part of the device is a point of support. The support point is realized as a corset with the tab on the shoulder area. On the tab placed a round groove with a magnet. The end of the cord is joined to a plastic ball with magnetic core. In such a construction it is assumed that a person suffering from ET will be available to attach and detach the cord singly.
The proposed method suppression tremor does not exclude placement of a support point elsewhere. For greater comfort, it may be placed on the left shoulder for a right hand or on a waist-belt. Also a support point may be mounted on the table edge by means of clip for tablecloth.
The most important part of the device - the algorithm of the electronic control unit may be the subject of additional scientific research and clinical trials.
_______
At the end I bring comic video of how it works.
Note: The video contains a short fragment of the Soviet satirical play "Energetic People" (1974)
This video excerpt shows "creativity" of a man suffering from alcoholic hand tremor when, he tries to drink a glass of whiskey. Video is humorous, but of course, I did not want to hurt people suffering from hand tremors.
https://www.youtube.com/watch?v=rWpXG530oY8
Special thanks to Cardero Carlos for ARTICULATED HUMAN BODY.
Similar models
grabcad
free

a model of rotational MR damper for elbow tremor suppression
...le suspensions which may adapt to road conditions, as they are monitored through sensors in the vehicle, and in prosthetic limbs.
grabcad
free

MECHANICAL HAND TREMOR STABILIZER
...itself.
springs used in this gadget needs to be calibrated well , to eliminate required amplitudes and frequencies of vibration.
grabcad
free

Wrist support brace
...and and damping of tremors. speed of motion can be reduced using this solution.
please feel free to critique and share opinions.
grabcad
free

Die Casting Gravity_Dogbone Vibration Damper
...ration damper is damping devices are designed for the single purpose of reducing or minimisingvibration, which damages conductors
grabcad
free

Damped Spring
...damped spring
grabcad
vibrating spring with damper
grabcad
free

Synergetic reducer of the tremor amplitude
...justment of the patient's hand. extras velcro fastener can be used velcro fastener.
for more details see pdf file text_tremor
grabcad
free

Governor
...scenarios but i don’t know what to apply in the current model and why. need more explanation about these 3 methods applicability.
grabcad
free

Magneto-Rheology Damper
...magneto-rheology damper
grabcad
mr damper uses mr fluid as damper oil and piston valve coil for controllable damping force
grabcad
free

Hand tremor controller
...ded certain pressure and makes the fingers to hold tight there by reducing the tremors and this is mostly useful for old persons.
cg_trader
free

Damper
...er buffer spring racing car motorcycle shock absorber anti shock shock ks port spoilsport shocker merrygoround impulse racing car
Dynamic
3d_export
$10

Dynamic
...dynamic
3dexport
3ddd
free

DYNAMIC
...ния как на стену, так и на потолок. (ip44)
источник света - светодиод 3000k.
3 различных диаметра.
design by manuel remeggio 2010
turbosquid
$80

Dynamic Tower
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

Dynamic Obsolescence
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$5
Dynamic Grass 3D Model
...3d model
3dexport
dynamic green grass in wind land 3d model grass dynamic land and
dynamic grass 3d model keyhan44 56913 3dexport
3d_export
$10

Efficient Dynamic 3D Model
...efficient dynamic 3d model
3dexport
efficient dynamic bmw concept best
efficient dynamic 3d model akila 52142 3dexport
cg_studio
$60

Dynamic Stereo3d model
...dynamic stereo3d model
cgstudio
.max - dynamic stereo 3d model, royalty free license available, instant download after purchase.
3d_ocean
$5
Dynamic Human Eyes Pack
...of the iris is between brown and blue. dynamic pupil_eye: the size of the pupil can be adjusted files included: dynamic iris c...
turbosquid
$149

Dynamics Game Pack
...
royalty free 3d model dynamics game pack for download as ma on turbosquid: 3d models for games, architecture, videos. (1142327)
turbosquid
$10

Dynamic Female Statue
...yalty free 3d model dynamic female statue for download as ztl on turbosquid: 3d models for games, architecture, videos. (1249924)
Reducing
turbosquid
$20

Motor Reducer
...quid
royalty free 3d model motor reducer for download as iam on turbosquid: 3d models for games, architecture, videos. (1165191)
3d_export
$5
nw planetary reducer
...nw planetary reducer
3dexport
nw planetary reducer
turbosquid
$10

Micro Reducer
...del micro reducer for download as max, ipt, 3ds, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1626248)
3d_export
free
2-stage reducer
...2-stage reducer
3dexport
use catia to draw the assembly of level 2 reducer!
turbosquid
$12
Reducer Charm Ming
...
royalty free 3d model reducer charm ming for download as rfa on turbosquid: 3d models for games, architecture, videos. (1303601)
turbosquid
$7

Compression reducing tee
...ty free 3d model compression reducing tee for download as max on turbosquid: 3d models for games, architecture, videos. (1540313)
turbosquid
$19
Tram reduced model
...3d model tram reduced model for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1203059)
3d_export
free

first stage reducer
...ell in motion simulation, especially for the assembly and disassembly of reducer when surveying and mapping for college students.
3d_export
$35

Helical reducer 3D Model
...echanism evolvent
helical reducer 3d model download .c4d .max .obj .fbx .ma .lwo .3ds .3dm .stl kazankindima20220 104069 3dexport
3d_export
$35

Helical reducer 3D Model
...cal 3d solidworks
helical reducer 3d model download .c4d .max .obj .fbx .ma .lwo .3ds .3dm .stl kazankindima20220 104065 3dexport
Hand
3d_export
$8

hand
...hand
3dexport
fantasy hand
3d_export
$5

hand
...hand
3dexport
male hand
3d_export
$5

hand
...hand
3dexport
realistic male hand
3d_export
$5

hand
...hand
3dexport
hand with nails and structure
archibase_planet
free

Hand
...hand
archibase planet
hand
hand n190111 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3ddd
$1

Hand
...hand
3ddd
hand
модель руки будды
3d_export
$5

hand
...hand
3dexport
it is my wrist of hand and this is on 3d sculpt
3d_export
$5

hand
...hand
3dexport
realistic male hand obj file
3d_export
$7

hand-006 rigged hand
...hand-006 rigged hand
3dexport
rigged right hand 3d model additional textures for pbr rendering included
3d_ocean
$6

Hand
...
this 3d models of the hands, made in 3ds max, has textures(.jpg), materials(.mat), rigged, the models in .max, fbx, obj format.
Support
turbosquid
$5
Support
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$8

Support 3D Model
...support 3d model
3dexport
support cantilever console
support 3d model tasal 73900 3dexport
3d_export
$5
phone support
...phone support
3dexport
phone
turbosquid
$12

Support bars
...squid
royalty free 3d model support bars for download as max on turbosquid: 3d models for games, architecture, videos. (1411542)
turbosquid
$8

support weights
...id
royalty free 3d model support weights for download as max on turbosquid: 3d models for games, architecture, videos. (1411538)
turbosquid
$2

headphone support
...royalty free 3d model headphone support for download as sldpr on turbosquid: 3d models for games, architecture, videos. (1357583)
turbosquid
$2

Support for flowers
...royalty free 3d model support for flowers for download as max on turbosquid: 3d models for games, architecture, videos. (1463543)
turbosquid
$14

Flower Support
...alty free 3d model flower support for download as max and obj on turbosquid: 3d models for games, architecture, videos. (1497066)
turbosquid
$5

serum support
...yalty free 3d model serum support for download as c4d and obj on turbosquid: 3d models for games, architecture, videos. (1551267)
3d_export
$10

spyro joystick support
...spyro joystick support
3dexport
joystick support of spyro dragon