Thingiverse
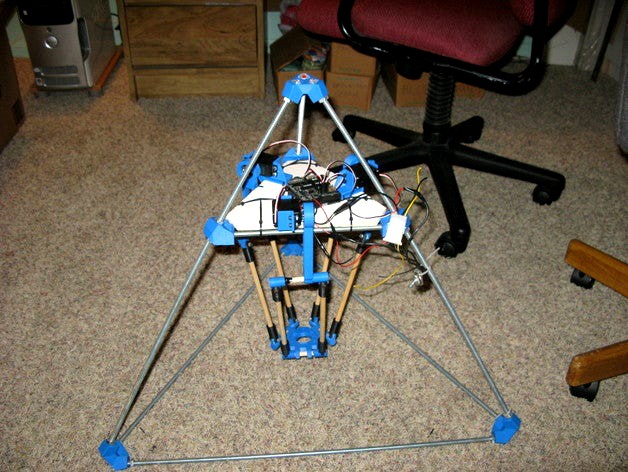
Delta Robot - Yazzo PolyBot Derivative by Renosis
by Thingiverse
Last crawled date: 2 years, 11 months ago
This is a Derivative of the original Yazzo PolyBot by WilliamAAdams. I found the original design to be something I wanted to build and test with immediately. So I found some things I wanted to do differently and wanted other people to experiment with this awesome robot.
UPDATE: The Female and Male Clevis Elbows I had uploaded here are the wrong size. I no longer have the proper size on my computer. Please follow these links to get them:
http://www.thingiverse.com/thing:8130http://www.thingiverse.com/thing:8129
On the original Polybot the files were spread around Thingiverse and were very hard to find, I have consolidated them into one spot.
I have also changed the threaded rod connectors of the Tetrahedron support structure. These new ones should be much easier to print and will print without support. They should also be much sturdier.
I have also changed the servo brackets to make them much easier to mount the servos. You no longer have to take apart your servos and struggle with getting them back together in order to mount them. The servos also sit out further off the platform. With the original design, the servos sat too far in on the platform making it impossible to get a good range of motion for the servo arms.
One of the negatives of these new designs is the need for fasteners. The original PolyBot was designed to use as few fasteners as possible. This one can be edited to make the holes smaller on the printed parts for the threaded rod to fit snugly into without the use of nuts. I prefer to use nuts because it makes assembly so much easier. Nuts are pretty inexpensive too and you are probably going to be in the hardware store anyway for the threaded rod.
Currently, I am using standard Medium Hobby Servos to move the arms. For now they work really well and easily move the lightweight arms of this bot.
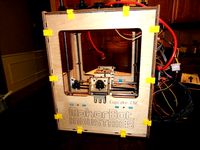
As for the micro-controller, I am using a Picaxe 28X/40X. But you can use whatever you like.
If you find this bot to be interesting, I seriously recommend printing and building it. It is pretty cheap to build and doesn't take much time. It is a lot of fun to mess around with. As for improvements, I already have a bunch of ideas in mind. And I know WilliamAAdams is working on improvements for the original Cranberry Yazzo Polybot, hopefully he will release something soon!
Here is a video of it moving... I should have gotten it to do something more interesting. But I have to go to work in the morning and I spent the night preparing the files and doing this write-up. Kind of lame, more and better video soon! I promise!
http://www.flickr.com/photos/58101887@N02/5587175033/
Another update... I couldn't leave it for the night with just that crappy first video. So I programmed some numbers that might make the bot look like it is moving semi-coherently.
So here is a better video of Delta Robot Movement:
http://www.youtube.com/watch?v=fWZOHDWu0EM
UPDATE: The Female and Male Clevis Elbows I had uploaded here are the wrong size. I no longer have the proper size on my computer. Please follow these links to get them:
http://www.thingiverse.com/thing:8130http://www.thingiverse.com/thing:8129
On the original Polybot the files were spread around Thingiverse and were very hard to find, I have consolidated them into one spot.
I have also changed the threaded rod connectors of the Tetrahedron support structure. These new ones should be much easier to print and will print without support. They should also be much sturdier.
I have also changed the servo brackets to make them much easier to mount the servos. You no longer have to take apart your servos and struggle with getting them back together in order to mount them. The servos also sit out further off the platform. With the original design, the servos sat too far in on the platform making it impossible to get a good range of motion for the servo arms.
One of the negatives of these new designs is the need for fasteners. The original PolyBot was designed to use as few fasteners as possible. This one can be edited to make the holes smaller on the printed parts for the threaded rod to fit snugly into without the use of nuts. I prefer to use nuts because it makes assembly so much easier. Nuts are pretty inexpensive too and you are probably going to be in the hardware store anyway for the threaded rod.
Currently, I am using standard Medium Hobby Servos to move the arms. For now they work really well and easily move the lightweight arms of this bot.
As for the micro-controller, I am using a Picaxe 28X/40X. But you can use whatever you like.
If you find this bot to be interesting, I seriously recommend printing and building it. It is pretty cheap to build and doesn't take much time. It is a lot of fun to mess around with. As for improvements, I already have a bunch of ideas in mind. And I know WilliamAAdams is working on improvements for the original Cranberry Yazzo Polybot, hopefully he will release something soon!
Here is a video of it moving... I should have gotten it to do something more interesting. But I have to go to work in the morning and I spent the night preparing the files and doing this write-up. Kind of lame, more and better video soon! I promise!
http://www.flickr.com/photos/58101887@N02/5587175033/
Another update... I couldn't leave it for the night with just that crappy first video. So I programmed some numbers that might make the bot look like it is moving semi-coherently.
So here is a better video of Delta Robot Movement:
http://www.youtube.com/watch?v=fWZOHDWu0EM
Similar models
thingiverse
free

Z Axis Nut Mount 8mm Traped Nut by Nitrogen777
...uld use stainless steel threaded rod and a steel nut.
this will stop the two binding also the nut will wear not the threaded rod.
thingiverse
free

Linear 18, 10-24 Thread by fastmike75
...stable for about anything. giving you ways to do things or move things.
youtube video https://www.youtube.com/watch?v=p-a-yjtdik0
thingiverse
free

Robot arm base by Ajaxjones
...thingiverse
added a ring to the base and a cable catcher, also scaled at x10.2 so easier to print and the servo fits much easier
thingiverse
free

Yazzo Cantilever Clip by WilliamAAdams
... a flat piece, like a shelf on top of it.
you could add your own screw holes if you need to fasten it to something more securely.
thingiverse
free

Servo and threaded rod gears by flintols
... attach to a fs90r servo and a ¼ / 20 threaded rod 7/16" nut). it should be able to adapt easily for other projects as well.
thingiverse
free

Yazzo Servo Linkage by WilliamAAdams
...yazzo servo linkage by williamaadams thingiverse similar to the thing it derives from, except this time...
thingiverse
free

Plex Bot by Sbbrain
... body pieces.
i am using the adafruit 16 servo i2c expansion board and adafruit's 9 dof board.
https://youtu.be/gvob_gllxao
thingiverse
free

Rod cutting vise / jig by 3dGringo
...not chew up the threads like a normal vise will.
made for 8mm rods but it should scale up or down easily for whatever you need.
thingiverse
free

Aluminum 2020 top filament spool holder by JoePrint
...ne, spool. then reverse order for the other side. don't tighten the nuts/wing nuts too much... just enough to hold the spool.
thingiverse
free

Yazzo PolyBot - Raspberry Edition by WilliamAAdams
...update: some blog posting to go with it...http://williamaadams.wordpress.com/2011/06/14/yazzo-polybot-raspberry-edition-take-one/
Polybot
thingiverse
free

alvrn's polybot (in progress) by alvern
...connected to the internet via the arduino mega for users to control and a watched via webcam.
whoa art
http://vimeo.com/23274677
thingiverse
free

PolyBot Male Clevis by cyborg527
...cyborg527
thingiverse
this is the same thing, just oriented better for 3d printing, the hole is on top instead of on the bottom.
thingiverse
free

PolyBot Servo Mount with Screw Hole by WilliamAAdams
...i considered having more holes for more holding goodness, but i'm still sticking with the minimal fasteners design principle.
thingiverse
free

PolyBot Swooped Effector Base by WilliamAAdams
...s. it is somewhat parametric. you can choose how long the arms are, and the size of the axle mounts. it is a bit hacky though.
thingiverse
free

PolyBot Socket Ball Holder by WilliamAAdams
...e frames.
you can change parameters in the openscad to adjust the size of the protrusions, or the width of the slot, or whatever.
thingiverse
free
PolyBot Effector Base by WilliamAAdams
... there's a lot of surface area, and it will tend to want to warp. so, print with a high raft to absorb some of that warpage.
thingiverse
free
Yazzo PolyBot - Raspberry Edition by WilliamAAdams
...update: some blog posting to go with it...http://williamaadams.wordpress.com/2011/06/14/yazzo-polybot-raspberry-edition-take-one/
thingiverse
free

PolyBot Female Clevis by WilliamAAdams
... with this other thing: http://www.thingiverse.com/thing:8130
the two combined form a fairly tight joint with very little wiggle.
thingiverse
free
PolyBot Male Clevis by WilliamAAdams
...e two things combined form a nice elbow joint where one end is 1/4" and the other is 5/16", or whatever sizes you need.
Renosis
thingiverse
free

Colbertopus by Renosis
... yeoldebrian.
http://www.thingiverse.com/thing:7900
this was created in openscad... an opensource programmer's solid modeler.
thingiverse
free

Colbert in Carbonite by Renosis
... in carbonite by gianteye posted here http://www.thingiverse.com/thing:1274.
this was created using open source software meshlab
thingiverse
free

Revolver by Renosis
...ving parts. this is my second design and if i tried to get carried away with over engineering it, i would have never finished it.
thingiverse
free

Push Puppet Gangsta by Renosis
... he collapses like he was gunned down in a drive by!
let go of the button and he stands back up to pimp again!
repeat as desired!
thingiverse
free

Bre Solo - Frozen In Carbonite by Renosis
...ender in openscad, so i had to kludge it together in meshlab.
i am printing now. not expecting the best results. but we will see.
thingiverse
free

MakerBottable Manhattan by Renosis
...lfman and was dowloaded here:
http://sketchup.google.com/3dwarehouse/details?mid=2ce6d321c188c63f6de399f9a6d47fc8&prevstart=0
thingiverse
free

Mk6+ Safety Cutoff Switch - Negative Space by Renosis
...ude a terminal strip, that will mount in the bolt hole of the z platform between the stepper motor threaded rod and the extruder.
thingiverse
free

Ball Socket Fan Mount for MakerGear Prusa. by Renosis
... attach either to your x carriage or to a reprap mendel's x carriage. thanks to stefanhh for his original ball socket design!
thingiverse
free

Flower - Push Puppet by Renosis
...p://www.youtube.com/watch?v=pjeeox-yp4o
updated video showing the old and new versions of the flower:
http://youtu.be/k2dztu1u94u
thingiverse
free

Clip for Dust Pan and Broom w/ Handle by Renosis
...he replacement. i figured i would upload, because who knows, maybe someone else has the same dustpan and will need this some day.
Yazzo
thingiverse
free
Yazzo by WilliamAAdams
...the connectors. the openscad file allows you to parameterize these connectors, and create any sizes you might want to play with.
thingiverse
free

Yazzo PCB Harness by WilliamAAdams
...reased width on a few of them.
multiple toy panels, with harnessed electronics attached can be assembled into really neat things.
thingiverse
free

Yazzo Servo Linkage by WilliamAAdams
...elative sizing of things. by default the arm is 1/2" thick to match the size of the sleeve bearing that's at the joint.
thingiverse
free

Yazzo Sliponic by WilliamAAdams
..., you might be able to make a structure that is more solid.
otherwise, it's just another thing in the yazzo construction set.
thingiverse
free
Yazzo UClip Keyed by WilliamAAdams
...tandard key on the edge of it, so that you can attach something, or a number of things to it by sliding the key into their notch.
thingiverse
free

Yazzo UClip Hinged by WilliamAAdams
...ther couple of clips to a piece of acrylic, roughly the size of the window. you get instant "doors" for your makerbot.
thingiverse
free
Yazzo MonkeyBot by WilliamAAdams
...atable without any support structure.
update: 9 jan 2011
updated the part to be used for the clip. there is a new locking l-clip
thingiverse
free

Yazzo Female Clevis by WilliamAAdams
...mm plastic filament probably. good enough for prototyping. printing on its side would probably be best for structural strength.
thingiverse
free

Yazzo Connector Buttons by WilliamAAdams
...t for the next modification.
in the future, i will be adding a round snap button as well, which will give you rotational ability.
thingiverse
free
Yazzo Rod Shelf Connector by WilliamAAdams
...: 08 12 2010
added shelf clip, so you can snap onto rod instead of slip on
added .scad file so you can generate for your own size
Delta
design_connected
$16

Delta
...delta
designconnected
lj lamps delta computer generated 3d model. designed by janowski-lenhart, sasha.
design_connected
$16

Delta
...delta
designconnected
arflex international spa delta computer generated 3d model. designed by koivisto, eero.
design_connected
$13

Delta
...delta
designconnected
emu group delta armchairs computer generated 3d model. designed by marin chiaramonte .
3ddd
$1

Delta Light
...delta light
3ddd
delta light , you-turn reo 3033
точечний светильник delta light
3ddd
$1

Blanco / delta
...blanco / delta
3ddd
blanco , мойка
мойка blanco delta со смесителем
3ddd
$1

Delta Light Spot
...delta light spot
3ddd
delta light
светильник фирмы delta light
3ddd
free

Bianchi Delta LVMDLT200100
...i delta lvmdlt200100
3ddd
bianchi delta , смеситель
смеситель bianchi delta lvmdlt200100
design_connected
free

Delta 190
...delta 190
designconnected
free 3d model of delta 190 by zanotta designed by progetti, emaf.
design_connected
$27

Delta 211
...delta 211
designconnected
zanotta delta 211 computer generated 3d model. designed by progetti, emaf.
design_connected
$27

Delta 234
...delta 234
designconnected
zanotta delta 234 computer generated 3d model. designed by progetti, emaf.
Derivative
3ddd
$1

Ligne Roset Derive
...gne , roset , pierre
все текстуры присутствуют.
3ddd
$1

DREAM LIGHT
...dream light
3ddd
dream light
a contemporary light design derived from nature
3ddd
$1

segis dragonfly
...the same insect, whose body is characterized by an imbalance in weight distribution between the front legs and its extended tail.
3d_export
$85

General Dynamics Griffin LightTank
...for the united states army. the griffin is a derivative of ascod family of afvs, which was also designed...
3ddd
$1

Baker / PAINTED VENETIAN BED
...louis xv forms, this venetian bed features a painted chinoiserie lovebird motif and is available in baker's painted finishes.
3d_export
$60

grumman s-2 f tracker
...introduced in 1952, the tracker and its e-1 tracer derivative saw service in the u.s. navy until the mid-1970s,...
3d_ocean
$15

Bronze Bull lamp
...220 years) relics – bronze ox lights, this is the model of a few years ago i made a version of its zbrush for 2.5d game object...
3d_export
$60

General Dynamics F-16 XL
...f-16 xl 3dexport the general dynamics f-16xl is a derivative of the f-16 fighting falcon, with a cranked-arrow delta...
3d_ocean
$89

Infiniti QX 2011
...d of clean fluid lines that attract and hold your attention. it continues with the highest level of luxury, not just for the d...
3d_export
$25

san juda pendant
...s . if you encounter any problem or if you have any question, you can contact me without hesitating. with my best regards, thanks
Robot
3d_ocean
$20

Robot
...robot
3docean
character metal robot robot robotic white
robot model for 3dsmax 2009 and greater
3d_ocean
$45

Robot
...robot
3docean
fighing machine robot
a fighting robot from the scrapyard.
3d_ocean
$18

Robot
...robot
3docean
machin robot science fiction
high poly robot.
3d_export
$7

Robot
...robot
3dexport
robot
3d_export
$5

robot
...robot
3dexport
robot
3d_export
free

Robot
...robot
3dexport
robot
turbosquid
$10

Robot/ Alien Robot
...
royalty free 3d model robot/ alien robot for download as max on turbosquid: 3d models for games, architecture, videos. (1442828)
3d_export
$5

robot
...robot
3dexport
robot in blender
3ddd
$1

robot
...robot
3ddd
робот
robot
3ddd
$1

Robot
...robot
3ddd
робот
robot