Thingiverse

Coaxial Dualcopter mk II - almost like RC SpaceX Falcon 9 thrust vectoring rocket by DzikuVx
by Thingiverse
Last crawled date: 3 years, 1 month ago
This is 3D printed coaxial dualcopter made from common multirotor parts.
This is how it flies: https://youtu.be/lt3TfAiue1Q
Thrust and yaw control is provided by 2 counter rotating propellers
Upper motor is 2205 2300KV with 5x4.5x3 propeller rotation in CW direction
Lower motor is 2205 2600KV with 4x4.5x3 propellers rotating CCW
Flight controller runs INAV 2.0
Control surfaces are rotated 45 degrees from long axis to fit servos
flight controller is also 45 degrees rotated
control surfaces installed with tape hinges
any 9g servos will do
runs on 4S battery that has to be on the top of dualcopter
structure is provided by 2 14mm carbon pipes
use hot glue and zip ties to secure all the parts on the carbon tubes
each STL file has to be printed once
Required parts:
1 2205 2300KV brushless motor
1 2205 2600KV brushless motor (2300 also will do but will have less yaw authority)
1 5x54.5x3 propeller
1 4x4.5x3 propeller
2 14mm carbon pipes (12mm internal diameter), each around 270mm long
2 2g servos
3m bolts to secure the motors
good adhesive tape to make control surface hinges
some pushrods
hot glue
flight controller compatible with INAV
radio receiver
INAV mixer
mmix reset
mmix 0 1.000 0.000 0.000 -1.000
mmix 1 1.000 0.000 0.000 1.000
smix reset
smix 0 0 0 50 0
smix 1 0 1 -50 0
smix 2 1 0 50 0
smix 3 1 1 50 0
PIDs (you will have to retune depending on thrust and servo throw, they are way from perfect)
set mc_p_pitch = 140
set mc_i_pitch = 50
set mc_d_pitch = 10
set mc_p_roll = 140
set mc_i_roll = 50
set mc_d_roll = 10
set mc_p_yaw = 50
set mc_i_yaw = 20
set mc_d_yaw = 0
This is highly experimental device! During take off, do not ramp up the throttle. You have to yank it to 75% and then settle low. Control surfaces needs airflow to maintain stability
EDIT 2018-10-04
Updated STL files to slightly move center of gravity up improve in the air handling
This is how it flies: https://youtu.be/lt3TfAiue1Q
Thrust and yaw control is provided by 2 counter rotating propellers
Upper motor is 2205 2300KV with 5x4.5x3 propeller rotation in CW direction
Lower motor is 2205 2600KV with 4x4.5x3 propellers rotating CCW
Flight controller runs INAV 2.0
Control surfaces are rotated 45 degrees from long axis to fit servos
flight controller is also 45 degrees rotated
control surfaces installed with tape hinges
any 9g servos will do
runs on 4S battery that has to be on the top of dualcopter
structure is provided by 2 14mm carbon pipes
use hot glue and zip ties to secure all the parts on the carbon tubes
each STL file has to be printed once
Required parts:
1 2205 2300KV brushless motor
1 2205 2600KV brushless motor (2300 also will do but will have less yaw authority)
1 5x54.5x3 propeller
1 4x4.5x3 propeller
2 14mm carbon pipes (12mm internal diameter), each around 270mm long
2 2g servos
3m bolts to secure the motors
good adhesive tape to make control surface hinges
some pushrods
hot glue
flight controller compatible with INAV
radio receiver
INAV mixer
mmix reset
mmix 0 1.000 0.000 0.000 -1.000
mmix 1 1.000 0.000 0.000 1.000
smix reset
smix 0 0 0 50 0
smix 1 0 1 -50 0
smix 2 1 0 50 0
smix 3 1 1 50 0
PIDs (you will have to retune depending on thrust and servo throw, they are way from perfect)
set mc_p_pitch = 140
set mc_i_pitch = 50
set mc_d_pitch = 10
set mc_p_roll = 140
set mc_i_roll = 50
set mc_d_roll = 10
set mc_p_yaw = 50
set mc_i_yaw = 20
set mc_d_yaw = 0
This is highly experimental device! During take off, do not ramp up the throttle. You have to yank it to 75% and then settle low. Control surfaces needs airflow to maintain stability
EDIT 2018-10-04
Updated STL files to slightly move center of gravity up improve in the air handling
Similar models
thingiverse
free

Snillrik SnowFlowTwo by MattiasKallio
...two like this in inav and it's something very similar in bf (ok, looked it up, it exactly the...
grabcad
free

EMAX 2205 RS 2600kv
...emax 2205 rs 2600kv
grabcad
emax 2205 rs 2600kv brushless motor.
grabcad
free

Racerstar BR2205 2300KV Brushless Motor
...ultirotor-p-1066837.html (4x racerstar racing edition 2205 br2205 2300kv 2-4s brushless motor 2 cw & 2 ccw for qav250 zmr250)
thingiverse
free

FPV BiCopter by DzikuVx
...fpv bicopter by dzikuvx thingiverse bicopter frame. flight concept similar to avatar copter. you will need: 4 10x4x3 bearings...
3dwarehouse
free

MOTORS - EMAX 2205-2600KV
...motors - emax 2205-2600kv
3dwarehouse
grabcad
free

Brushless motor 2205
...brushless motor 2205
grabcad
brushless motor 2205
thingiverse
free

Micro JWL Quadcopter Frame for 16x16 & 20x20 Flight Controllers by dreamcutter
...000 -0.670 0.645 -1.000
mmix 1 1.000 -1.000 -0.645 1.000
mmix 2 1.000 0.694 0.648 1.000
mmix 3 1.000 0.976 -0.647 -1.000
thingiverse
free

BiCopter by algerbens
...t, later a camera and 5.8ghz transmitter were added and the bicopter was flown fpv.
https://www.youtube.com/watch?v=a6w27psw3t0
grabcad
free

MicroTITAN 1806 2300kv Brushless Motor
...microtitan 1806 2300kv brushless motor
grabcad
microtitan 1806 2300kv brushless motor
3dwarehouse
free

RC Brushless Motor Thrust Meter
...rc brushless motors can be measured and comparison made using different propellers. #brushless_motors #current #meter #rc #thrust
Dualcopter
thingiverse
free

Bicopter / Twincopter / Dualcopter by YXC
...
(http://www.thingiverse.com/thing:1555053)https://www.youtube.com/watch?v=vbzvsiuaxhqhttps://www.youtube.com/watch?v=wkcxqi30l2o
thingiverse
free

Spherical Drone by kert
...as flight controller, but the multiwii implementation of the "dualcopterquot; is not behaving correctly, so i lacked some time...
Dzikuvx
thingiverse
free

XT60 holder for ZMR250 frame by DzikuVx
...xt60 holder for zmr250 frame by dzikuvx
thingiverse
this holder fits chinese zmr250 clones with ~32mm rear standoffs spacing
thingiverse
free

433MHz Moxon Antenna by DzikuVx
...e
433mhz moxon rectangle antenna with mounting system. usable for telemetry, long range radio systemes (lrs) and other purposes.
thingiverse
free

Paddlewheel RC boat by DzikuVx
...ddleboat. to power paddlewheels you will need 2 continuousrotation servos. or regular 9g servos converted to continuous rotation.
thingiverse
free

Aileron horns for RC airplanes by DzikuVx
...aileron horns for rc airplanes by dzikuvx
thingiverse
simple horns for ailerons. 2mm hole. install using epoxy or hot glue
thingiverse
free

Beitian BN-880 GPS case by DzikuVx
...beitian bn-880 gps case by dzikuvx
thingiverse
case for beitian bn-880 gps module
thingiverse
free

Flybox Flux Aerodynamic Improvements by DzikuVx
...ements by dzikuvx
thingiverse
walls for flybot flux freestyle wing.
this version uses m3 threaded inserts http://bit.ly/2ldi6il
thingiverse
free

Nano Talon VTX holder by DzikuVx
...
thingiverse
holder for vtx for zohd nano talon to be used on a nose canopy.fits akk x2-ultimate but should fit also other vtxes
thingiverse
free

Airboat propulsion and steering by DzikuVx
...ors (19x16mm holes) like 2205 and similar. suited for 5" propellers.
short video:https://www.youtube.com/watch?v=7rmdw3bfni0
thingiverse
free

Pirx 5 Caddx Vista antenna bracket by DzikuVx
...pirx 5 caddx vista antenna bracket by dzikuvx
thingiverse
print with tpu filament and glue the caddx vista antenna tube in
thingiverse
free
FPV BiCopter by DzikuVx
...t controller with inav or betaflight
fpv is optional
frame is assembled with m3 screws and threaded inserts http://bit.ly/2ldi6il
Coaxial
3d_export
$35

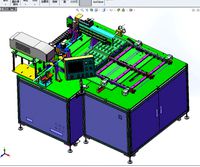
coaxial stripping machine
...ree of automation, it can be divided into fully automatic coaxial stripping machine and semi-automatic coaxial stripping machine.
3d_export
$5

repair sleeve for manual transmission handle bmw
...b.m.w.<br>the sleeve is knocked out. i drilled a hole coaxialy with the bore from the top in the handle...
3d_export
$10

blanco blanco saga
...control technology.<br>the cartridge for manual water control is concealed coaxialy inside the body of the spout, and is operated...
3d_export
$60

kamov ka-50 hokum a
...is a russian single-seat attack helicopter with the distinctive coaxial rotor system of the kamov design bureau. it was...
3d_export
$20

T 70
...l/46 model 38 with forty-five rounds carried, and a coaxial 7.62-mm dt machine g4n. the tank was operated by...
3d_export
$20

btr90 armored personnel carrier russia
...arc. it is armed with a 30 mm autocanon, coaxial 7.62mm machinegun, as well as ags-17 a 30mm automatic...
3d_export
$20
wire laser cutting peeling cutting machine ffc cutting machine
...equipment is suitable for cutting and peeling products: fpc coaxial line, ffc wire, laser cutting and peeling of various...
3d_export
$50

Tank Oplot-M Main Battle Tank Ukraine 3D Model
...with a kba-3 125mm smoothbore gun, a kt-7.62 (pkt) coaxial machine gun and a kt-12.7 anti-aircraft machine gun. the...
3d_export
$18

tramontina liz collection white
...doorbell switch<br>- module usb outlet<br>- module tv/sat outlet direct coaxiallt;br>- module outlet ehternet<br>- module push button switch<br>- module bipolar...
3d_export
$18

tramontina liz collection fendi
...doorbell switch<br>- module usb outlet<br>- module tv/sat outlet direct coaxiallt;br>- module outlet ehternet<br>- module push button switch<br>- module bipolar...
Spacex
turbosquid
$39

Spacex
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$22

Spacex capsule dragon
...spacex capsule dragon
3dexport
spacex capsule dragon
cg_studio
$69

SpaceX Dragon3d model
... .fbx .lwo .max .dragon/maya .obj .xsi - spacex dragon 3d model, royalty free license available, instant download after purchase.
3d_export
$45

spacex raptor engine
...de referring to the first version of prototypes. included file formats are: 3ds max, obj, fbx, stl. textures are in 4k resolution
3d_export
$60

elon musk character with spacex dragon suits
...
the format has embedded texture. very well rigged this you can use 3d characters in the production of animated film or in games
3d_export
$24

spacex raptor rocket engine
... corresponding textures, with sizes ranging between 512px and 4096px. an extra .rar file with the textures only is also included.
3d_export
$5

rocket falcon 9
...rocket falcon 9 3dexport rocket falcon 9 the company spacex ...
3d_export
$10

starship prototype
...starship model currently manufactured in boca chica ,texas by spacex this prototype consist features like forward flaps, bottom flaps...
3d_export
$21

space shuttle launch smoke vdb 2
...shuttle launching. place a model of a rocket, soyuz, spacex rocket or anything similar and you got yourself an...
3d_export
$21

space shuttle launch smoke vdb
...shuttle launching. place a model of a rocket, soyuz, spacex rocket or anything similar and you got yourself an...
Thrust
turbosquid
$15

Indian thrusting knife
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$45

Goodyear Billboard Torq Thrust Combo
... billboard torq thrust combo for download as ma, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1436455)
turbosquid
$5

13th Century French Thrusting Sword
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$50

glider aircraft
...a long wingspan of 1.5 m motor to increase thrust contains 3 fans frame material balsawood or...
3d_export
$10

Jet engine 3D Model
...3d model 3dexport jet engine turbine fan plane fly thrust tech airport jet engine 3d model dogmaf 32144...
3d_export
$50

B747 Throttle Quadrant 3D Model
...b747 boeing throttle quadrant aircraft parts fly speed reverser thrust 747 b747 throttle quadrant 3d model gokay 83915...
3d_export
$5

Jet Engine 3D Model
...power machine detail motor turbine fan plane fly turbo thrust tech airport aviation aircraft demonstration industry jet engine 3d...
3d_export
$20

Needle Bearing 3D Model
...bearing skf roller needle engineering gearbox engine car industrial thrust spherical radia machinery race cage manufacturing gear needle bearing...
3d_export
$20

Tapered Roller Bearing 3D Model
...bearing skf roller needle engineering gearbox engine car industrial thrust spherical radia machinery race cage tapered roller bearing 3d...
3d_export
$20

Roller Bearing Small 3D Model
...bearing skf roller needle engineering gearbox engine car industrial thrust spherical radia machinery race cage manufacturing roller bearing small...
Falcon
3d_export
$15

falcon
...falcon
3dexport
falcon 3d model
archibase_planet
free

Falcon
...falcon
archibase planet
falcon bird
falcon 1 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Falcon
...falcon
archibase planet
falcon bird
falcon 2 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
design_connected
$11

Falcone
...falcone
designconnected
willisau falcone computer generated 3d model. designed by kössl , ulrich.
3ddd
$1

Kolarz Falcon
...kolarz falcon
3ddd
kolarz , falcon
светильник kolarz falcon, 040.16.6
3ddd
$1

Falcon
... статуэтка
современное американское искусство. стиль art deco. является заведомым прототипом (но не копией) известного образца.
turbosquid
free

Falcon
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
archive3d
free

Falcon 3D Model
...3d model
archive3d
falcon bird
falcon 2 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archive3d
free

Falcon 3D Model
...3d model
archive3d
falcon bird
falcon 1 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
3d_export
$20

fordd falcon 1973
...fordd falcon 1973
3dexport
fordd falcon 1973
Vectoring
3d_export
$15

vector
...vector
3dexport
3d_export
free

Vector
...ctor. triangular low geometry modeling. textured in substance painter free model, would you help me with an assessment? thank you
turbosquid
$34

KRISS Vector
...squid
royalty free 3d model kriss vector for download as obj on turbosquid: 3d models for games, architecture, videos. (1310611)
turbosquid
$19

Kriss vector
...squid
royalty free 3d model kriss vector for download as fbx on turbosquid: 3d models for games, architecture, videos. (1537707)
turbosquid
$10

DTI VECTOR
...bosquid
royalty free 3d model dti vector for download as stl on turbosquid: 3d models for games, architecture, videos. (1245406)
turbosquid
$25

Kriss vector
...oyalty free 3d model kriss vector for download as fbx and obj on turbosquid: 3d models for games, architecture, videos. (1563999)
turbosquid
$4

Kriss Vector
...oyalty free 3d model kriss vector for download as max and fbx on turbosquid: 3d models for games, architecture, videos. (1361805)
3d_ocean
$15

Vector W2
...t tuner vector vehicle w w-2 w2
detailed low polygon vector w2. for the latest model, visit my website: http://syndicate3d.at.ua/
turbosquid
$25

Vector Sol
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$20

vector kriss
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Mk
3d_export
$5

scorpion mk
...scorpion mk
3dexport
scorpion mk .zpr,stl,obj,stl,
turbosquid
$6

MK 11
...turbosquid
royalty free 3d model mk 11 for download as blend on turbosquid: 3d models for games, architecture, videos. (1223895)
3d_export
$5

Qubeley MK-II
...qubeley mk-ii
3dexport
3d lowpoly type qubeley mk-ii
turbosquid
$3

MK killer
...lty free 3d model mk killer for download as fbx, obj, and 3ds on turbosquid: 3d models for games, architecture, videos. (1638698)
turbosquid
$25

Valentine Mk
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$10

Mk-16
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$7

Mk-16
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
free

mk-2
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$25
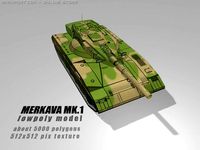
Merkava MK 1 3D Model
... 1 3d model
3dexport
merkava mk-1 tank low-poly model maya mk1 mk mk-2 mk-3 israel army
merkava mk 1 3d model rom64 5311 3dexport
3ddd
$1

мясорубка Panasonic MK G1800P
...мясорубка panasonic mk g1800p
3ddd
мясорубка , panasonic
мясорубка panasonic mk g1800p
Rocket
3d_export
$5

rocket
...rocket
3dexport
rocket 3d model low poly
3d_export
$5

rocket
...rocket
3dexport
rocket low poly 3d model cartoon
archibase_planet
free

Rocket
...rocket
archibase planet
rocket toy
rocket tintin's n290813 - 3d model (*.gsm+*.3ds+*.max) for interior 3d visualization.
3d_export
$5

Rocket
...rocket
3dexport
the rocket is made from a cylinder made in blender 3.0
turbosquid
$6

Rocket Baby Rocket Stool
...el rocket baby rocket stool for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1502645)
turbosquid
$15

rocket
...ket
turbosquid
royalty free 3d model rocket for download as on turbosquid: 3d models for games, architecture, videos. (1340796)
turbosquid
$10

Rocket
...ket
turbosquid
royalty free 3d model rocket for download as on turbosquid: 3d models for games, architecture, videos. (1247547)
3d_export
$5

scifi rocket
...scifi rocket
3dexport
scifi rocket
turbosquid
$199

rockets
...turbosquid
royalty free 3d model rockets for download as max on turbosquid: 3d models for games, architecture, videos. (1233135)
turbosquid
$30

Rocket
...
turbosquid
royalty free 3d model rocket for download as fbx on turbosquid: 3d models for games, architecture, videos. (1290260)
Rc
3ddd
$1

RC Helicopter
...rc helicopter
3ddd
вертолет
mini rc helicopter
93.329 polys
3d_export
$7

rc helicopter model
...rc helicopter model
3dexport
rc helicopter model
3d_ocean
$25

RC F1
...rc f1
3docean
auto car control f1 formula race rc remote speed
remote control f1 car
turbosquid
$10
rc plane
...lane
turbosquid
free 3d model rc plane for download as blend on turbosquid: 3d models for games, architecture, videos. (1295828)
turbosquid
$100

RC Helicopter
...free 3d model rc helicopter for download as 3ds, max, and obj on turbosquid: 3d models for games, architecture, videos. (1298511)
turbosquid
$59

Drone with RC
...3d model drone with rc for download as 3ds, max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1363601)
3d_export
$70

rc helicopter 3D Model
...rc helicopter 3d model
3dexport
rc helocopter
rc helicopter 3d model babay 10536 3dexport
turbosquid
$75

RC buggy
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$39

RC Plane001
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$30

RC Jet
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
Almost
turbosquid
$150

almost done.c4d
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$2

Booker almost final.max
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3ddd
$1

Обои ECO, коллекция Almost white
...бесшовные. размер текстур: от 1083х1083 до 2048х1024 пикселей. ссылка на коллекцию –http://www.eco.se/ru/collection-42/
3d_export
$5

Coachtablearmchair 3D Model
...coachtablearmchair 3d model 3dexport almost free coachtablearmchair 3d model freeon 24073...
digiprops
$6

Yellow concrete parking stopper #01
...#01 digiprops yellow concrete parking stopper with two bolts. almost new, very little...
3ddd
$1

Saki Pendant-light
...a tribute to this unforgotten island, recognized by its almost extinct bamboo roots...
3d_export
$5

acoustic guitar
...cycles, when using the eevee render, the quality remains almost unchanged.the model is perfect for large renders, since the...
3d_export
$8

House
...or school work a modern style house of 12x26m almost completely finished includes plan in >(.layout) and (png)m formats...
3d_ocean
$5

Glas of Red Wine with Bottle
...wine glas a glas of red wine and an almost empty...
3d_export
$5

radiator
...detailed radiator modelled in blender. this can be used almost anywhere, however it is not a low poly model,...
Ii
3d_ocean
$5
inoplanet II
...inoplanet ii
3docean
3ds arman3dg games ii inoplanet low max poly trees
inoplanet ii
3ddd
$1

Novecento II
...novecento ii
3ddd
консоль
консоль: ii novecento
дизайнер: elia monterosso
3ddd
$1

Спальня VENERO II
...d
venero ii , venero , hulsta
спальня venero ii
3ddd
$1

PROPORTION II
...proportion ii
3ddd
malabar emotional
консоль proportion ii
malabar emotional design
коллекция euphoria
3ddd
$1
Regina II
...ltrona frau , капитоне
this is a custom version of the poltrona frau regina ii armchair.
3d_export
$119

cinderella ii
...cinderella ii
3dexport
3d_export
$119

lara ii
...lara ii
3dexport
3d_export
$119

doris ii
...doris ii
3dexport
3ddd
$1

Heracleum II
...s endless technical possibilities,
making this new version much more efficient while providing unique and sparkling illumination.
3ddd
$1

Towel Collection II
...towel collection ii
3ddd
полотенце
towel collection ii
9
3ddd
$1

9
...9
3ddd
консоль
9
turbosquid
$40

Apple iPhone 9 & 9+
...del apple iphone 9 & 9+ for download as max, obj, and fbx on turbosquid: 3d models for games, architecture, videos. (1284550)
turbosquid
$12

Calligraphic Digit 9 Number 9
...hic digit 9 number 9 for download as max, obj, fbx, and blend on turbosquid: 3d models for games, architecture, videos. (1389349)
3ddd
$1

PLANTS 9
...plants 9
3ddd
папоротник , кашпо
plant 9.. hope u all like it
design_connected
$11

194 9
...194 9
designconnected
194 9 computer generated 3d model. designed by lissoni, piero.
design_connected
free

Tangram 9
...tangram 9
designconnected
free 3d model of tangram 9 by lago designed by lago, daniele.
design_connected
$11
Domino 9
...domino 9
designconnected
zanotta domino 9 computer generated 3d model. designed by progetti, emaf.
design_connected
$20

Docks 9
...docks 9
designconnected
gandia blasco docks 9 computer generated 3d model. designed by romero vallejo.
3d_export
$80

mq-9
...mq-9
3dexport
3d_export
$6

washbasin-9
...washbasin-9
3dexport