Thingiverse

Chess Clock by WillemvD
by Thingiverse
Last crawled date: 3 years, 1 month ago
https://youtu.be/9qv9F0zIUgI
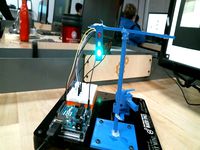
An Arduino controlled chess clock.
The speed of the clock can be changed with a potentiometer.
High speed for reaction games.
t is the delay after each change of levels and allows the magnetic fields to build up properly. t=3 works for most stepper motors. Make sure your power supply is accurate and supplies 5 volts, 1 or 2 Amps. The Arduino sketch below makes it all work.
//Nano half step mode
//512 >> 360 degrees 1.4 step/degree
int Pin0 = 9; int Pin1 = 10; int Pin2 = 11; int Pin3 = 12;
int Pin4 = 2; int Pin5 = 3; int Pin6 = 4; int Pin7 = 5;
int ClockPin = 2; //change between the two clocks
int SpeedPin = 0; //adjust with the potentiometer
int t=3;
void setup()
{
pinMode(Pin0, OUTPUT); pinMode(Pin1, OUTPUT); pinMode(Pin2, OUTPUT); pinMode(Pin3, OUTPUT);
pinMode(Pin4, OUTPUT); pinMode(Pin5, OUTPUT); pinMode(Pin6, OUTPUT); pinMode(Pin7, OUTPUT);
pinMode(ClockPin, INPUT); pinMode(SpeedPin, INPUT);
}
void loop()
{
int val = analogRead(ClockPin);
int speed = analogRead(SpeedPin);
if(val<400){
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, HIGH); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, HIGH); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, HIGH); delay(t);
delay(speed);}
else{
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, HIGH); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, HIGH); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, HIGH); delay(t);
delay(speed);}
}
An Arduino controlled chess clock.
The speed of the clock can be changed with a potentiometer.
High speed for reaction games.
t is the delay after each change of levels and allows the magnetic fields to build up properly. t=3 works for most stepper motors. Make sure your power supply is accurate and supplies 5 volts, 1 or 2 Amps. The Arduino sketch below makes it all work.
//Nano half step mode
//512 >> 360 degrees 1.4 step/degree
int Pin0 = 9; int Pin1 = 10; int Pin2 = 11; int Pin3 = 12;
int Pin4 = 2; int Pin5 = 3; int Pin6 = 4; int Pin7 = 5;
int ClockPin = 2; //change between the two clocks
int SpeedPin = 0; //adjust with the potentiometer
int t=3;
void setup()
{
pinMode(Pin0, OUTPUT); pinMode(Pin1, OUTPUT); pinMode(Pin2, OUTPUT); pinMode(Pin3, OUTPUT);
pinMode(Pin4, OUTPUT); pinMode(Pin5, OUTPUT); pinMode(Pin6, OUTPUT); pinMode(Pin7, OUTPUT);
pinMode(ClockPin, INPUT); pinMode(SpeedPin, INPUT);
}
void loop()
{
int val = analogRead(ClockPin);
int speed = analogRead(SpeedPin);
if(val<400){
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, HIGH); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, HIGH); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, LOW); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, HIGH); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, LOW); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, HIGH); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, LOW); delay(t);
digitalWrite(Pin0, HIGH); digitalWrite(Pin1, LOW); digitalWrite(Pin2, LOW); digitalWrite(Pin3, HIGH); delay(t);
delay(speed);}
else{
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, HIGH); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, HIGH); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, LOW); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, HIGH); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, LOW); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, HIGH); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, LOW); delay(t);
digitalWrite(Pin4, HIGH); digitalWrite(Pin5, LOW); digitalWrite(Pin6, LOW); digitalWrite(Pin7, HIGH); delay(t);
delay(speed);}
}
Similar models
thingiverse
free

Two wheeled car by WillemvD
...w); delay(t);
digitalwrite(pin4, high); digitalwrite(pin5, low); digitalwrite(pin6, low); digitalwrite(pin7, high); delay(t); }
}
thingiverse
free

LikeYouPartyPin by WillemvD
..., low); delay(200);digitalwrite(eye, high);delay(200);
digitalwrite(mouthlow, low); digitalwrite(mouthhigh, low); delay(500); }}}
thingiverse
free
3DX TRAFFIC LIGHT
...digitalwrite(ledg, low);
digitalwrite(ledy, high);
delay(3000);
digitalwrite(ledr, high);
digitalwrite(ledy, low);
delay(1000);
}
thingiverse
free

A Tracking Platform for Astrophotography by alex16
...delay(dl);
digitalwrite( in1, low );
digitalwrite( in2, low );
digitalwrite( in3, high );
digitalwrite( in4, high );
delay(dl);
}
thingiverse
free

Wheel of Fortune by WillemvD
...yservo.write(pos); delay(15); }
delay(2000);
for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); }
}
}
thingiverse
free

"Marble Run" by WillemvD
...ay(t);
digitalwrite(m2a, high); digitalwrite(m2b, low); digitalwrite(m2c, low); digitalwrite(m2d, high); delay(t);}
delay(500);
}
grabcad
free

Automatic Slide Gate Maket
...lwrite (dcl,low);
}
if(limitkanan==1 && hasilkiri==1){
digitalwrite (dcr,low);
digitalwrite (dcl,high);
}
}
thingiverse
free

X-Y unit almost for free by WillemvD
...d, low); delay(t);
digitalwrite(m2a, high); digitalwrite(m2b, low); digitalwrite(m2c, low); digitalwrite(m2d, high); delay(t);}
}
thingiverse
free

Motion sensing night light by SteveOst
...talwrite(led1,low);
digitalwrite(led2,low);
}
serial.println("motion");
serial.print(motionvalue);
}
else
{
delay(300);
thingiverse
free

3D printed induction motor controller with arduino by robogio
...write(b, high);
digitalwrite(c, high);
digitalwrite(d, low);
digitalwrite(e, high);
digitalwrite(f, low);
delaymicroseconds(t);
}
Willemvd
thingiverse
free

MarbleFun by WillemvD
...marblefun by willemvd
thingiverse
https://youtu.be/hrd8kk79cdc
your (grand)children will love it!
thingiverse
free
MarbleMover by WillemvD
...marblemover by willemvd
thingiverse
https://youtu.be/hrd8kk79cdc
your (grand)children will love it!
thingiverse
free

Three in a row by WillemvD
...three in a row by willemvd
thingiverse
three in a row classic version.
thingiverse
free

Whistling propellor by WillemvD
...istling propellor by willemvd
thingiverse
https://youtu.be/qjzllndmnp4
a two component sound generator. works on a toy dc motor.
thingiverse
free

Candy Bucket by WillemvD
...y willemvd
thingiverse
printed buckets full of candy, carried by the robot. the kids will have fun.
https://youtu.be/sd_6ownlv54
thingiverse
free
Static Candy Dispenser by WillemvD
...static candy dispenser by willemvd
thingiverse
hopefully you do a better paint job.
thingiverse
free

EggcupPlus by WillemvD
....thingiverse.com/thing:606963
add a spoon holder and a place to put the shells and your easter table will look like never before.
thingiverse
free

Marble mania by WillemvD
...thingiverse
a marble in orbit...
https://youtu.be/reivgsk-oai
a drop of oil on the four contact points and the tip of the rotor.
thingiverse
free
ServoSpirograph by WillemvD
...
by changing the parameters in the sketch, different patterns are generated.
the disk is cd size and fits on a 5mm stepper shaft.
thingiverse
free

MoonWalker by WillemvD
...be
simple 3d printed walking mechanisme. the frame sizes depend on the gearwheels and geared motor you have "in stock".
Chess
3ddd
free

Chess
...chess
3ddd
chess , шахматы
chess
3d_ocean
$6

chess
...chess
3docean
chess game
chess,game
3d_export
$5

chess
...chess
3dexport
chess
3d_export
$5

chess
...chess
3dexport
chess
3d_ocean
$6

Chess
...chess
3docean
chess decor design elements game interior
just chess
3d_export
$5

chess
...chess
3dexport
chess modern
3d_export
$5

the chess
...the chess
3dexport
the chess board.
3d_export
free

chess
...chess
3dexport
3d model chess
3d_export
$15

chess
...chess
3dexport
chess complete set with 32 pieces and a board
3d_export
$5

chess
...chess
3dexport
marble chess with ceramic figures, great for interior decoration
Clock
3d_ocean
$4

Clock
...clock
3docean
clock hand kitchen clock time watch
a clock
archibase_planet
free

Clock
...clock
archibase planet
clock table clock alarm-clock
clock orange - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock table clock alarm-clock
clock yellow - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock alarm-clock
clock n100707 - 3d model for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock table clock
clock - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock striking clock
clock - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock wall clock
clock 1 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock wall clock
clock 2 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
clock wall clock
clock 3 - 3d model (*.gsm+*.3ds) for interior 3d visualization.
archibase_planet
free

Clock
...clock
archibase planet
alarm clock alarm-clock
clock - 3d model (*.gsm+*.3ds) for interior 3d visualization.