Thingiverse
Balancing robot with etched PCB shield by JDD
by Thingiverse
Last crawled date: 4 years, 1 month ago
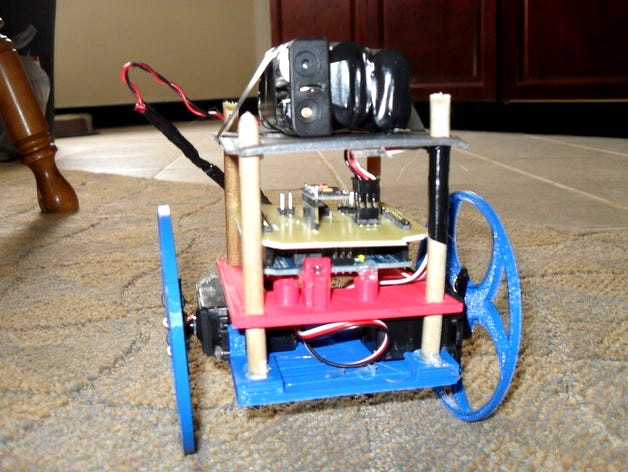
Balancing robot with printed wheels and structural parts. It uses a Arduino Uno, accelerometer/gyroscope, and a etched motor/servo PCB shield that I made.
Here's a video of it in actionhttp://www.youtube.com/watch?v=LAWjUlzAYf0&feature=plcp
The final robot is quite a bit different from the first prototype. You can see the progression of this project here:
www.jddorweiler.appspot.com/electronics.html#robot
I've wanted to make a balancing robot for a while but I was always turned away by the cost of all the parts. I tried to avoid using any expensive electronics or motors and instead tried to use common parts that other might have lying around. This is pretty much my first arduino/programming/PCB project so I'm sure there is room for others to improve it. Using servos was a cheap alternative to much more expensive geared motors but they're also a bit slow. This means that the robot can only recover from small pushes.
The PCB was designed using Fritzing http://fritzing.org/ with help from http://www.fubarlabs.org and code is at http://github.com/jdorweiler/BalancingRobot
The board has the H-bridge, which can control two DC motors or one stepper motor, accelerometer/gyroscope, and two servo connections. The PCB isn't required but I did it for fun. The three iterations of the robot used a DC motor, stepper, and servo so I though it would be nice to make a board that can handle any of those.
I got a lot of the code and good information was found fromhttp://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1284738418/all
andhttp://www.kerrywong.com/2012/03/08/a-self-balancing-robot-i
If your making the PCB and using a different accelerometer board, make sure to check the pins. They're probably not the same and the one I used. This would be easy to change in the Fritzing file though.
Here's a video of it in actionhttp://www.youtube.com/watch?v=LAWjUlzAYf0&feature=plcp
The final robot is quite a bit different from the first prototype. You can see the progression of this project here:
www.jddorweiler.appspot.com/electronics.html#robot
I've wanted to make a balancing robot for a while but I was always turned away by the cost of all the parts. I tried to avoid using any expensive electronics or motors and instead tried to use common parts that other might have lying around. This is pretty much my first arduino/programming/PCB project so I'm sure there is room for others to improve it. Using servos was a cheap alternative to much more expensive geared motors but they're also a bit slow. This means that the robot can only recover from small pushes.
The PCB was designed using Fritzing http://fritzing.org/ with help from http://www.fubarlabs.org and code is at http://github.com/jdorweiler/BalancingRobot
The board has the H-bridge, which can control two DC motors or one stepper motor, accelerometer/gyroscope, and two servo connections. The PCB isn't required but I did it for fun. The three iterations of the robot used a DC motor, stepper, and servo so I though it would be nice to make a board that can handle any of those.
I got a lot of the code and good information was found fromhttp://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1284738418/all
andhttp://www.kerrywong.com/2012/03/08/a-self-balancing-robot-i
If your making the PCB and using a different accelerometer board, make sure to check the pins. They're probably not the same and the one I used. This would be easy to change in the Fritzing file though.