Thingiverse

Balancer for Adaptive Grip Prosthetic by Gyrobot
by Thingiverse
Last crawled date: 3 years ago
A simple inline mechanism that will offer adaptive grip for robotic and prosthetic hands.
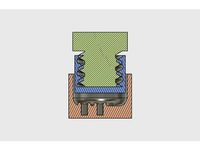
With a single tendon pull, you can close all the fingers together, if resistance is met by any of the fingers then the balancing mechanism will react by "seesaw" to stop that finger and carry the travel to the other finger tendons.Once all fingers are gripped around the irregular object then the loads equal and further pulling will tighten the grip across all fingers.
If you offset the the linkage towards the little finger, then this will close the index finger first, then the middle finger etc, for a progressive and adaptive grip.
See this video, to visualise the mechanism working : http://youtu.be/ch6IuaLgQxo
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
With a single tendon pull, you can close all the fingers together, if resistance is met by any of the fingers then the balancing mechanism will react by "seesaw" to stop that finger and carry the travel to the other finger tendons.Once all fingers are gripped around the irregular object then the loads equal and further pulling will tighten the grip across all fingers.
If you offset the the linkage towards the little finger, then this will close the index finger first, then the middle finger etc, for a progressive and adaptive grip.
See this video, to visualise the mechanism working : http://youtu.be/ch6IuaLgQxo
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
Similar models
thingiverse
free

Mechanical Finger Joint by rmpink
...my second thing.
https://youtu.be/csclv5aoiqi
1mm paper clip wire (for joints)
monofilament or fishing line (for finger channels)
thingiverse
free

Customizable Mounting Prosthetic Hand Design by BrandenW
...e hand open, and the fishing line goes through the holes on the front of the fingers, so that when it is pulled, the hand closes.
thingiverse
free

Helping Hand by 3dprntr_1
...de:
wrist circumduction capability
adaptive grip (can conform to oddly shaped objects)
natural (less mechanical) feel to the user
thingiverse
free

Finger Flexion by JayJo
...same three linkages at 80% (pinky)
soft rubber inserts for gripping
will attach to palm plate... coming
opposable thumb... coming
thingiverse
free

experimental prosthetic hand ( using phoenix finger ) by TMesple
...ntal prosthetic hand ( using phoenix finger ) by tmesple
thingiverse
experimental shapes to adapt phoenix finger on an open hand
thingiverse
free

V.2 Flex Fingers, Swivel Thumb Prosthetic Hand by 1d1
...ximation of an actual hand. the mesh palm is scaled the same percentage as the palm or can be printed larger for a bigger pocket.
thingiverse
free

eNable 3D Printed Prosthetic Hand "Reverse Grip" by Tyler_Wooten
...osthetic hand opens. this allows the user to hold onto objects for longer periods of time without feeling fatigue in their wrist.
thingiverse
free

ultimate 6s balance plug holder by orangecyrax
... that has a 1mm clearance to be able to use you finger nails to pull it out. its a perfect fit and i have never had one pull out.
thingiverse
free

Prosthetic Hand Project "C@tch your chance" V 1.0 "Tatiana" by Swissdesigner
... original position. (whatch the video on the bottom of this page)
how do i build it ?
instructions are down below ;-) (updated)
thingiverse
free

InMoov finger prosthetic project by Gael_Langevin
...u can follow inmoov robot project here:http://inmoov.blogspot.com
you can follow more:http://www.inmoov.fr/inmoov2-hand-progress/
Gyrobot
thingiverse
free

Gyrobot Extruder Range by Gyrobot
...uder.4. gyrobot micro dual extruder - richrap quick-fit compatible.5. gyrobot micro quad extruder - richrap quick-fit compatible.
thingiverse
free

Gyrobot Token and Keyfob by Gyrobot
...e wherever you go.
in reality, i just use them for colour swatches.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free
Remix of Stealth Birdhouse by Gyrobot
...ottom for ventilation/water drain.
take a moment to visit gyrobot pages:http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Gyrobot Pi mount for Raspberry Pi by Hondo88
...gyrobot pi mount for raspberry pi by hondo88
thingiverse
modified gyrobot to attach raspberry pi to rigidbot printer frame.
thingiverse
free

Stealth Birdhouse by Gyrobot
...
invisible to radar and sonar, no bats are going to steal this nestbox.http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Art Deco Birdhouse by Gyrobot
...y gyrobot
thingiverse
for the bird with a discerning eye for detail.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Flexy-Strap by Gyrobot
...be used for a variety of purposes.
printed in filaflex from recreus
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Sealant Nozzle by Gyrobot
...r sealant/caulk gun, never need to unblock a solidified nozzle again.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Sealant Spreaders by Gyrobot
...sed to shape the bead of many sealants that are used around the house.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
thingiverse
free

Bread Lame by Gyrobot
... loaves, baguettes etc. before baking in the oven.
no support required.
http://www.gyrobot.co.ukhttp://www.facebook.com/gyrobotuk
Prosthetic
thingiverse
free

Prosthetic arm
...prosthetic arm
thingiverse
prosthetics arm
3d printable
thingiverse
free

Prosthetic Arm
...prosthetic arm
thingiverse
a prosthetic arm purely for asthetic purposes. it was made for a client's wedding.
thingiverse
free

Dog Prosthetic by 3DESIGNER27
...animal allies. cheap alternative for dog prosthetic limb. scale in your slicer to fit the dog you are looking to apply prosthetic
thingiverse
free

XOR Prosthetic Hand by chandlersupple
...xor prosthetic hand by chandlersupple
thingiverse
prosthetic hand - two part
thingiverse
free
python prosthetic by SamBautistaEatsDog
...ver arm they like. the friction fit will allow the utensil to stay in place. for the assembly, go to https://youtu.be/ltjvqbdkdhi
thingiverse
free
prosthetic finger by fingerless1
... prosthetic.
designed this to give me some use of my middle finger that was surgically amputated due to tendon and nerve damage.
thingiverse
free

Prosthetic Paw by GabeRomero
...thetic paw for general purpose, i tried to keep the design as versatil as possible, keep an eye on my creations for more designs.
thingiverse
free

prosthetic foot v0.1 by Zerberos
...rosthetic foot v0.1 by zerberos
thingiverse
this is a idee of a prosthetic foot.
i ask for suggestions and comments
thx
zerberos
thingiverse
free

Computer Mouse Prosthetic Attachment by Garrettspu
...r a prosthetic hand developed here at spu. it attaches to the prosthetic and allows the user to operate a computer mouse with it.
thingiverse
free

Prosthetic Sling Shot by BK95
...sling shot by bk95
thingiverse
this slingshot is to function on a prosthetic.
printing:
0.4 nozzle, 0.2 layer height, 20% infill
Balancer
thingiverse
free

balancer by Loadsofhop22
...balancer by loadsofhop22
thingiverse
balancer
thingiverse
free

Balance by Migfue
...balance by migfue
thingiverse
balance for children
thingiverse
free
Balancer by harperwilliame
...gs from pens, this "balancer" can be used to balance a computer monitor (or i guess a number of other different things)
thingiverse
free

Balancer by InlineTwin
...balancer by inlinetwin
thingiverse
use to balance things that rotate like wheels, propellers, driveshafts.
thingiverse
free

Arrow Balance
... least and balance two bolts side by side see if they have the same balance points. if so they should shoot pretty much the same.
thingiverse
free

Balancer by Itek
... 3mm bolts and nuts. you still need a balance shaft and some magnets.
inside distance between towers: 135mm
inside height: 75mm
thingiverse
free

Balance Dragonfly by sergioinglese
...balance dragonfly by sergioinglese
thingiverse
balance dragonfly
thingiverse
free

Balancing Chess by The_LAB
...balancing chess by the_lab
thingiverse
balancing chess
thingiverse
free

Balance by aavendano
...at the same pace to keep the object in balance. it is a cooperative piece to help keep a balanced relationship with your partner.
thingiverse
free

balancing pen by SCHARLYDESIGNERSTUDIO
...balancing pen by scharlydesignerstudio
thingiverse
pen that balance itself
Grip
thingiverse
free
Grip by romanlees
...grip by romanlees
thingiverse
grip
thingiverse
free

TS100 Grip
...ts100 grip
thingiverse
an extended grip for the ts100 soldering iron.
thingiverse
free
Grip by Zelljo
...grip by zelljo
thingiverse
simple grip for furniture or other things.
thingiverse
free
AK Grip
...o better replicate original grip. also included a file with a cutout for the bolt hold open on the citadel rs-s1 (vepr 12 clone).
thingiverse
free

1911 Grips
...1911 grips
thingiverse
grips for a 1911. biohazzard inlay. hollowed out for a colour resin fill.
thingiverse
free

Airtag Grip-pod for A2/Magpul grips by lfras
...airtag grip-pod for a2/magpul grips by lfras
thingiverse
fits inside standard a2 grip as well as most other ar-15 pistol grips.
thingiverse
free

Pencil Grip by RJ_12
...pencil #2 0.7 - https://goo.gl/cuq09l
included in order are: standard replacement grip, textured grip, and improved pressure grip
thingiverse
free

Grip de brouette / grip wheelbarrow by taxitain
.... diam : 32mm, longueur : 110mm, epaisseur 1mm
replacement grip for my wheelbarrow. diam : 32mm, lenght : 110mm, thickness : 1mm
thingiverse
free
Grip (HANDLE) by Raduka
...grip (handle) by raduka
thingiverse
grip
thingiverse
free

pan grip by Samofff
...pan grip by samofff
thingiverse
pan grip
Adaptive
thingiverse
free
Adapter
...adapter
thingiverse
adapter to use filament rolls with 72mm inside diameter
thingiverse
free

adapter by Ladehoff
...adapter by ladehoff
thingiverse
adapter
thingiverse
free
adapter by eslyuta
...adapter by eslyuta
thingiverse
adapter
thingiverse
free

Clean 45RPM adapter, single adapter
...clean 45rpm adapter, single adapter
thingiverse
clean, basic 45rpm adapter. fits most turntables.
thingiverse
free

Fan Adapter
...fan adapter
thingiverse
fan adapter
thingiverse
free

Lens adapter
...lens adapter
thingiverse
lens adapter
thingiverse
free

Fahrradventiel Adapter
...fahrradventiel adapter
thingiverse
fahrradventiel adapter
thingiverse
free
adapter with by dougthegr8
...adapter with by dougthegr8
thingiverse
adapter holder
thingiverse
free

gopro adapter
...gopro adapter
thingiverse
angal adapter for gopro
thingiverse
free

Socket Adapter
...socket adapter
thingiverse
hand twist socket adapter