Thingiverse
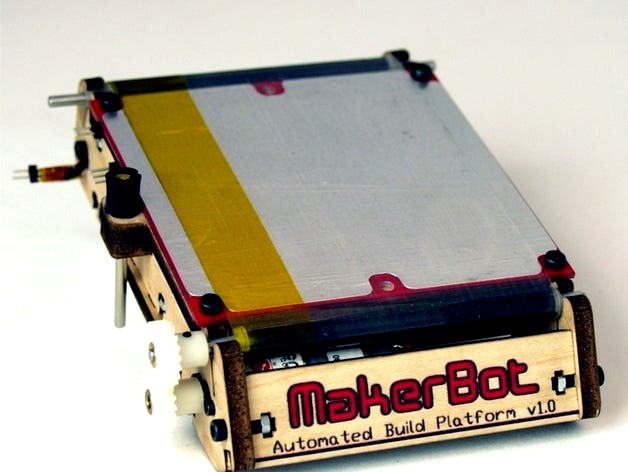
Automated Build Platform by MakerBot
by Thingiverse
Last crawled date: 2 years, 12 months ago
The Automated Build Platform is a totally new way of printing your 3D objects. For the first time ever multiple objects can be printed in succession without the need for human intervention.
Up until now, the 3D printing industry has been focused on making one part at a time. You had to manually remove your object from the build surface and prepare your machine for the next build. This is true for all other 3D printers on the planet. MakerBot is the first to bring to you a truly automated 3D printing experience. That era is over and the new dawn of personal manufacturing has truly begun.
Designed by MakerBot Industries own enemy of entropy, Charles Pax, the Automated Build Platform is the latest upgrade to the MakerBot Personal Manufacturing line of products. In development for over a year, it is a heated build platform combined with an automatic conveyor belt. The conveyor rolls forward after completing a print, wipes the boogers off the nozzle, resets itself, and prints again!
Let me say that in another way- you can print part after part, hands free!
The build surface is essentially a conveyor belt upon which each object is printed. Once an object is complete the belt turns over and and the machine begins the next print. It's that simple! There's even a brush to clean your nozzle between objects.
It's an awesome addition to the CupCake, and it has all the printing advantages of the MakerBot Heated Build Platform built in. Optimized to work with the beautiful and reliable MK5 MakerBot Extruder, you can look forward to watching your desktop factory auto-eject your dreams into a parts bucket of unending awesomeness!
The ABP is compatible with all versions of ReplicatorG as long as you use the modified start.txt and end.txt. You should use ReplicatorG 19 because it has these files integrated in a Skeinforge profile.
At the very beginning of a print the nozzle tip must be centered on the build platform just above the surface. This initial state is assumed in the start.txt file. One of the first commands given in start.txt tells the machine to assume the nozzle position as x=0, y=0, z=0. After printing an object the nozzle tip must be returned to this same spot to be ready for the next print. The end.txt file takes care of this. One of the last commands in end.txt makes the machine move the nozzle to x=0, y=0, z=0. The result is that one print ends in the same spot where a second print must begin. This allows us to take any two print files (gcode files) generated in this way and stick them end to end to make one print file that will print two objects in a row. Awesome!
Up until now, the 3D printing industry has been focused on making one part at a time. You had to manually remove your object from the build surface and prepare your machine for the next build. This is true for all other 3D printers on the planet. MakerBot is the first to bring to you a truly automated 3D printing experience. That era is over and the new dawn of personal manufacturing has truly begun.
Designed by MakerBot Industries own enemy of entropy, Charles Pax, the Automated Build Platform is the latest upgrade to the MakerBot Personal Manufacturing line of products. In development for over a year, it is a heated build platform combined with an automatic conveyor belt. The conveyor rolls forward after completing a print, wipes the boogers off the nozzle, resets itself, and prints again!
Let me say that in another way- you can print part after part, hands free!
The build surface is essentially a conveyor belt upon which each object is printed. Once an object is complete the belt turns over and and the machine begins the next print. It's that simple! There's even a brush to clean your nozzle between objects.
It's an awesome addition to the CupCake, and it has all the printing advantages of the MakerBot Heated Build Platform built in. Optimized to work with the beautiful and reliable MK5 MakerBot Extruder, you can look forward to watching your desktop factory auto-eject your dreams into a parts bucket of unending awesomeness!
The ABP is compatible with all versions of ReplicatorG as long as you use the modified start.txt and end.txt. You should use ReplicatorG 19 because it has these files integrated in a Skeinforge profile.
At the very beginning of a print the nozzle tip must be centered on the build platform just above the surface. This initial state is assumed in the start.txt file. One of the first commands given in start.txt tells the machine to assume the nozzle position as x=0, y=0, z=0. After printing an object the nozzle tip must be returned to this same spot to be ready for the next print. The end.txt file takes care of this. One of the last commands in end.txt makes the machine move the nozzle to x=0, y=0, z=0. The result is that one print ends in the same spot where a second print must begin. This allows us to take any two print files (gcode files) generated in this way and stick them end to end to make one print file that will print two objects in a row. Awesome!
Similar models
thingiverse
free

Silicone nozzle wiper by MakerBot
... of the awesome makerbot teflon-coated nozzles you'll want to use a nozzle wiper that keeps your teflon surface looking good.
3dwarehouse
free

Conveyor (transportadora)
...onveyor (transportadora)
3dwarehouse
conveyor with 3 pistons #3d_machines #assembly #automation #belt #conveyor #machine #piston
cg_trader
$10

3D Conveyor Belt
...d logistics conveyor industry steel assembly platform mechanical robotic belt industrial machine industrial machine conveyor belt
grabcad
free

Scissor lift platforms.
...ssor lift platforms.
grabcad
scissor lift platforms.
mechanical automation teaching.
handling of heavy loads on a conveyor belt.
thingiverse
free

ABP Lowrider Mod by natetrue
... blender. the stl files and blender source are all corrected now though, and you will not have to turn that piece of wood around.
cg_trader
$10

BELT CONVEYOR
...belt conveyor
cg trader
belt conveyor step file conveyor machine industrial equipment belt industrial machine conveyor belt
thingiverse
free

Firmware homing support for ReplicatorG 24 by winterg
...ror or any other horrible train-wreck set of circumstances!!
sorry that sounded so much like a tv infomercial. happy hacking! :)
grabcad
free

Conveyor Belt
...conveyor belt
grabcad
automation conveyor belt project
cg_trader
$30

BELT CONVEYOR-MODULAR BELT
...modular belt step file equipment machinery machine belt conveyor industry industrial technology industrial machine conveyor belt
grabcad
free

Injection Molding Automation
...on
grabcad
automation of injection molding process, utilized linear robot and belt conveyor in serving injection molding machine
Automated
turbosquid
$19

Automation for gates
... model automation for gates for download as max, fbx, and obj on turbosquid: 3d models for games, architecture, videos. (1600153)
turbosquid
$5

Automated Teller Machine
...tomated teller machine for download as c4d, fbx, obj, and stl on turbosquid: 3d models for games, architecture, videos. (1677841)
turbosquid
$30

AUTOMATED GUARD STATION
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_ocean
$19

Drink Automate New
...w office old red retro rust soda store vending vintage
old rusty drink machine, and new shiny. xsi and lvo exported from blender.
evermotion
$10

home automation system 32 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
evermotion
$10

home automation system 35 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
evermotion
$10

home automation system 38 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
evermotion
$10

home automation system 24 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
evermotion
$10

home automation system 30 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
evermotion
$10

home automation system 27 am95
...ion system with all textures, shaders and materials.
it is ready to use, just put it into your scene.. evermotion 3d models shop.
Makerbot
thingiverse
free

MakerBot Mixtape by MakerBot
...t.com/makerbot-mixtape.html
designed by john b., matt k. and john d.
a collaborative project with playbutton
www.playbutton.com
thingiverse
free

MakerBot Nameplate by MakerBot
...plicator. this was seen in episode 5 of season 2 of makerbot tv http://www.youtube.com/watch?v=k815gaeelw8
created by todd blatt
thingiverse
free

Makerbot Mixtape Heart by MakerBot
... about a makerbot mixtape in a heart!
made by using the makerbot mixtape negative file
designed by john briscella and matt kroner
thingiverse
free

MakerBot Gnome by MakerBot
...at details that were not lost.
for more information on the makerbot digitizer desktop 3d scanner, visit makerbot.com/digitizer.
thingiverse
free

Makerbot Skate Park by MakerBot
...makerbot skate park by makerbot
thingiverse
a complete fingerboarding skate park.
thingiverse
free

MakerBot BotStep17 REVE by MakerBot
...esigned by harry mulliken.
this is part of the makerbot replicator, which you can find at http://www.thingiverse.com/thing:18813
thingiverse
free

Makerbot Mixtape Negative by MakerBot
...ngiverse
now your can make a makerbot mixtape out of almost any thing on thingiverse.
designed by john briscella and matt kroner
thingiverse
free

MakerBot Man Cupid by MakerBot
...piece at once and get moving parts right off the build plate.
available in the makerbot store gumball machine for a limited time!
thingiverse
free

MakerBot Pendant by MakerBot
...39;t go wrong sporting this necklace! wear it with pride. both dualstrusion and one color models are available.
created by todd
thingiverse
free

MakerBot Dynamo by MakerBot
...
and if a led not exciting enough for you, just think of all the other wonderful things you can power, one hand crank at a time.
Platform
archibase_planet
free
Platform
...rm
archibase planet
platform
platform stefano galli savio cerrato n040413 - 3d model (*.gsm+*.3ds) for exterior 3d visualization.
turbosquid
$4
Platform
...d
royalty free 3d model platform for download as max and fbx on turbosquid: 3d models for games, architecture, videos. (1363559)
3d_export
$5
WORKING PLATFORM
...working platform
3dexport
working platform 4000x3000x1500mm
turbosquid
$20

Platform
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$9

Platform
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1

Platform
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1

Platform
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$1
Platform
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_ocean
$19

Drilling Platform
...rm for coastal areas. designed to perform drilling operations. include standart materials scene and v-ray scene with environment.
3d_export
$15

steel grill platform
...steel grill platform
3dexport
steel grill platform
Build
archibase_planet
free

Building
...building high-rise building office building construction
building n050115 - 3d model (*.gsm+*.3ds) for exterior 3d visualization.
3d_export
$5
building
...building
3dexport
clasic building
3ddd
$1

building
...building
3ddd
здание
building
archibase_planet
free

Building
...lanet
building office office building construction
building n090914 - 3d model (*.gsm+*.3ds+*.max) for exterior 3d visualization.
archibase_planet
free

Building
...net
building tower construction high-rise building
building n100214 - 3d model (*.gsm+*.3ds+*.max) for exterior 3d visualization.
3d_export
free
Building
...building
3dexport
low poly building;
3d_export
free

Building
...building
3dexport
low poly building;
3d_export
free

Building
...building
3dexport
low poly building;
3d_export
free

Building
...building
3dexport
low poly building;
3d_export
free
Building
...building
3dexport
low poly building;