Thingiverse
AT-AS quadruped (or hexapod) robot by Anandromeda
by Thingiverse
Last crawled date: 4 years, 7 months ago
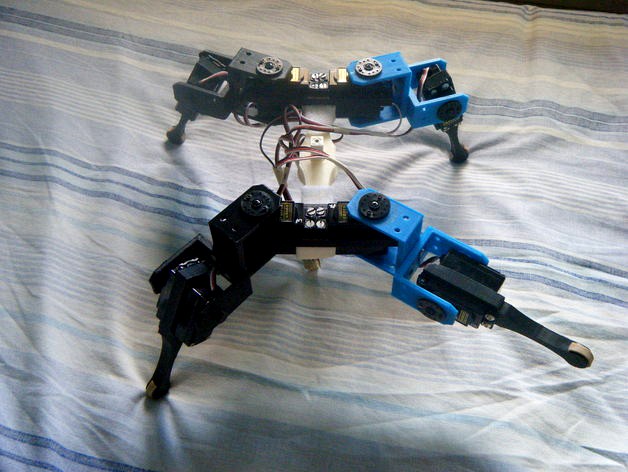
The "AT-AS" (All Terrain - Anita Scout) is a printable quadruped robot.
The AT-AS is a project of an efficient robot, as it has achieved a useful and complete walking robot base using few technical and economic resources. In addition, it is a flexible robot project since its design is open to many development possibilities in future works such as the transformation of the quadruped model to a hexapod model, easy modification of leg and modular structure design, the possibility of adding sensors to improve control or communication with other robots using wireless networks via Xbee modules.
I used two parts of the "Versatile Servo Bracket System" created by bryanandaimee:http://www.thingiverse.com/thing:5784
But the rest of parts has been designed by my own, using OpenSCAD and C++ OOML (Oriented-Object Mechanical Library): http://iearobotics.com/oomlwiki/doku.php?id=start
For the AT-AS implementation, I used:
1x Arduino Mega 2560.
8x Servo Futaba S3003.
1x Lipo Battery (2S, 7,4V).
1x UBEC (5V).
Remote control through a Gamepad connected to a PC.
Wireless communication through Bluetooth or XBee modules.
But this robot accepts others microcontrollers, servos (with similar dimensions) and others components for its control. Use the one you prefer!
See a video of AT-AS quadruped in action:http://www.youtube.com/watch?v=ae2UiOCUZeY&feature=g-upl
EVOLUTION:
Quadruped Robot --> Hexapod Robot
The part called: "hip_evolution_hexapod" is only for the transformation of the quadruped model to a hexapod model. Using this part, just need to print another two legs! :)
The AT-AS is a project of an efficient robot, as it has achieved a useful and complete walking robot base using few technical and economic resources. In addition, it is a flexible robot project since its design is open to many development possibilities in future works such as the transformation of the quadruped model to a hexapod model, easy modification of leg and modular structure design, the possibility of adding sensors to improve control or communication with other robots using wireless networks via Xbee modules.
I used two parts of the "Versatile Servo Bracket System" created by bryanandaimee:http://www.thingiverse.com/thing:5784
But the rest of parts has been designed by my own, using OpenSCAD and C++ OOML (Oriented-Object Mechanical Library): http://iearobotics.com/oomlwiki/doku.php?id=start
For the AT-AS implementation, I used:
1x Arduino Mega 2560.
8x Servo Futaba S3003.
1x Lipo Battery (2S, 7,4V).
1x UBEC (5V).
Remote control through a Gamepad connected to a PC.
Wireless communication through Bluetooth or XBee modules.
But this robot accepts others microcontrollers, servos (with similar dimensions) and others components for its control. Use the one you prefer!
See a video of AT-AS quadruped in action:http://www.youtube.com/watch?v=ae2UiOCUZeY&feature=g-upl
EVOLUTION:
Quadruped Robot --> Hexapod Robot
The part called: "hip_evolution_hexapod" is only for the transformation of the quadruped model to a hexapod model. Using this part, just need to print another two legs! :)