Thingiverse
ANT-ROBO by noteasy2
by Thingiverse
Last crawled date: 3 years ago
This is the design for the robot which controlled with Pi Zero-W.
Proposed features:
Driving Base:
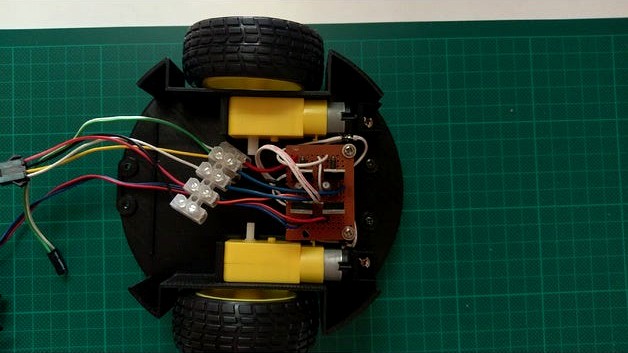
Circular base - with a control board of motors, wireless charging system, wheels and anti-hit bars/end stops
A control board is made of 4 transistors (2xC23353R and 2x E13005).
Two geared motors with wheel from Taobao. Projected pin was first removed and then inserted into the base vertically and then turn 90 degree. They are then fixed firmly with motor stop.
Front (i.e.To be redesigned after printing out top cover https://www.youtube.com/watch?v=5tfU5OTKygA )and rear dumpers with 2 limitinng switches and a ultra sound sensor are fixed on deckhttps://www.youtube.com/watch?v=6Urru7IsFrI&feature=youtu.be
Progress of works:
Base of motor mount and stops were made in July 2018
Front bumper was made on 23 Aug 2018
Supporting wheel carrier was made on 25 Aug 2018
(Hints: Supporting wheel was taken from a nylon wheel of the curtain and then fixed into carrier with a washer and locking pin)
(Hints: End stops of the front dumper were fixed in position with hot glue and a spring (i.e. from a pen) was installed onto the cap and to provide pushing force)
Top cover of the driving chamber with mounting holes for Pi Zero W was design and made on 1 Sep 2018
Servo and sensor mount were made by the end of Sep 2018
Software (Python3) and Assigned Pins in Pi Zero W
(Trial run was made on 14 Sep 2018 https://www.youtube.com/watch?v=gseHqjmimLA&feature=youtu.be)
2 driving geared motors (2 pins for transistor switch)
1 No. HC-SR04 ultra sound sensor (1 pin sharing for Trig and Echo)
1 serve (1 pin for PWM)
1 pin for 5V power supply
1 pin for common ground
Hints: ulimit -a (showning existing pi zero limits)
increase the hard and soft limits for pending signal no. and stack no.
Functional Modules (Optional):
Google Assitan - pushtotak was installed and working fine.in Pi Zero W (.i.e. ArmV6)
Actions will be added to triggered AntRobo.
A turbine and cyclone dust separator
Design of ultra sensor and servo mount and dust separator of cleaning module are in progress. Preliminary design of dome shaped head is drafted.
Head Unit(Pending):
Camera,speaker,mic and Indoor positioning system
Proposed features:
Driving Base:
Circular base - with a control board of motors, wireless charging system, wheels and anti-hit bars/end stops
A control board is made of 4 transistors (2xC23353R and 2x E13005).
Two geared motors with wheel from Taobao. Projected pin was first removed and then inserted into the base vertically and then turn 90 degree. They are then fixed firmly with motor stop.
Front (i.e.To be redesigned after printing out top cover https://www.youtube.com/watch?v=5tfU5OTKygA )and rear dumpers with 2 limitinng switches and a ultra sound sensor are fixed on deckhttps://www.youtube.com/watch?v=6Urru7IsFrI&feature=youtu.be
Progress of works:
Base of motor mount and stops were made in July 2018
Front bumper was made on 23 Aug 2018
Supporting wheel carrier was made on 25 Aug 2018
(Hints: Supporting wheel was taken from a nylon wheel of the curtain and then fixed into carrier with a washer and locking pin)
(Hints: End stops of the front dumper were fixed in position with hot glue and a spring (i.e. from a pen) was installed onto the cap and to provide pushing force)
Top cover of the driving chamber with mounting holes for Pi Zero W was design and made on 1 Sep 2018
Servo and sensor mount were made by the end of Sep 2018
Software (Python3) and Assigned Pins in Pi Zero W
(Trial run was made on 14 Sep 2018 https://www.youtube.com/watch?v=gseHqjmimLA&feature=youtu.be)
2 driving geared motors (2 pins for transistor switch)
1 No. HC-SR04 ultra sound sensor (1 pin sharing for Trig and Echo)
1 serve (1 pin for PWM)
1 pin for 5V power supply
1 pin for common ground
Hints: ulimit -a (showning existing pi zero limits)
increase the hard and soft limits for pending signal no. and stack no.
Functional Modules (Optional):
Google Assitan - pushtotak was installed and working fine.in Pi Zero W (.i.e. ArmV6)
Actions will be added to triggered AntRobo.
A turbine and cyclone dust separator
Design of ultra sensor and servo mount and dust separator of cleaning module are in progress. Preliminary design of dome shaped head is drafted.
Head Unit(Pending):
Camera,speaker,mic and Indoor positioning system
Similar models
grabcad
free

Raspberry Pi Zero 2 W Mount
...erry pi zero 2 w mount
grabcad
mount for raspberry pi zero 2 w, used to drive arducam for wrist camera. for use with widowx 250.
thingiverse
free

Raspberry Pi Zero case (Cat Cat) by wkkpatrick
...raspberry pi zero case (cat cat) by wkkpatrick
thingiverse
18 aug 2018
need 1 disposable wooden chopstick.
thingiverse
free
Raspberry Pi Zero W Camera Case by Alans Inventions by acollazo92
...mounts for the pi and also the camera to be mounted on the front. it is not waterproof and not perfect so i apologize in advance.
grabcad
free

Xgentec Rover Explorer ROV V1
...stepper motor wheel adapter mounts.
credit to trinityscsp for the raspberry pi model as a template for the rover hole placement.
thingiverse
free

Ultra-slim Raspberry Pi Zero W case and GoPro-style Pi Mount by hillct
...m is based upon an arm from the excellent modular gopro-style mounting system, with tabs added to accommodate the pi zero w case.
grabcad
free

Xgentec Rover Explorer ROV V2
...stepper motor wheel adapter mounts.
credit to trinityscsp for the raspberry pi model as a template for the rover hole placement.
grabcad
free

TO-220 transistor case w/bent pins.
... w/bent pins.
grabcad
to-220 transistor case w/bent pins. mount suggestion: parallel to pcb plane, attached to a heatsink plate.
grabcad
free

TO-247 transistor case w/bent pins
...e w/bent pins
grabcad
to-247 transistor case w/bent pins. mount suggestion: parallel to pcb plane, attached to a heatsink plate.
thingiverse
free

Raspberry Pi Zero W Command Strip Wall Mount by evanspn
...t-out is for clearance on some hammer gpio pins i used. the screw holes are 2.6 mm in fusion 360 but 0.3mm of it is for tolerance
grabcad
free

lego circuit board mountings
...unting a raspberry pi 3, 4 or zero and the ln298 motor driver on lego pins. i recommend using the pin with the part number: 4274.
Noteasy2
thingiverse
free
Box by noteasy2
...box by noteasy2
thingiverse
box was created from fusion 360 as a trial
thingiverse
free

Foldable door hanger by noteasy2
...foldable door hanger by noteasy2
thingiverse
this is a replacement plastic hanger for an aluminium bi-fold door.
thingiverse
free

Bridge Segment by noteasy2
...t model of a bridge in hk. how hard to creat this bridge?https://www.theb1m.com/video/hong-kong-to-macau-bridge-passes-inspection
thingiverse
free

Key Ring - Please call (phone no.) by noteasy2
...key ring - please call (phone no.) by noteasy2
thingiverse
made to order key ring
thingiverse
free

Coffee Mug by noteasy2
...nt with suitable filament to withstand high temperature (i.e.100 deg) such as pp. otherwise, you may only use it for cold drink.
thingiverse
free

Head of Ball Jointed Doll by noteasy2
...asy2
thingiverse
this is a girl head of a ball joint doll. the frame of doll is under designed base on the smart doll in japan.
thingiverse
free

Rubber Tie for Bicycle LED Flashing Light by noteasy2
...rubber tie for bicycle led flashing light by noteasy2
thingiverse
replacement rubber tie for bicycle flashing light.
thingiverse
free

Wall unit handle (add-on hook) by noteasy2
...andle. clothes can be hanged on it easily and the location can be changed by slipping it on the handle easily. my wife loves it.
thingiverse
free
Foam Board - Corner Mount by noteasy2
...o a flat surface with double side tape or sealant. a wedge is used to hold foam board in place and can be removed when necessary.
thingiverse
free

Differential Gear Box by noteasy2
...as input. 4 sun gears(16 teeth) are rotating in the center as output. the design of casing can be designed according to the use.
Robo
3d_export
$5

robo
...robo
3dexport
just robo for your game or video
turbosquid
$15

robo
...obo
turbosquid
royalty free 3d model robo for download as max on turbosquid: 3d models for games, architecture, videos. (550622)
3d_ocean
$5

robo head
...docean
head machines robo robo head robot vray
robo head model max 2010 and obj model 1024×1024 texture vray 2.40 render material
turbosquid
$2000

robo
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$50

robo
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$50

robo
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
turbosquid
$11

ROBO
... available on turbo squid, the world's leading provider of digital 3d models for visualization, films, television, and games.
3d_export
$10

Robo 3D Model
...robo 3d model
3dexport
he is robo
robo 3d model dpkisvv 32093 3dexport
turbosquid
$20

ROBO-BRAIN
...rbosquid
royalty free 3d model robo-brain for download as max on turbosquid: 3d models for games, architecture, videos. (550625)
turbosquid
$10

Robo-boy
...urbosquid
royalty free 3d model robo-boy for download as max on turbosquid: 3d models for games, architecture, videos. (1245875)
Ant
3ddd
free

Ant
...ant
3ddd
insect , ant , bug
ant 3d model
turbosquid
$24

Carnivorous ants / ants / insects
...3d model carnivorous ants / ants / insects for download as ma on turbosquid: 3d models for games, architecture, videos. (1323184)
3d_export
free

Ant
...ant
3dexport
the ant is low poly and has bones. there is material but simple made in blendore 3.0
design_connected
$11

Ant
...ant
designconnected
fritz hansen ant chairs computer generated 3d model. designed by arne jacobsen.
turbosquid
$99

Ant
...ant
turbosquid
royalty free 3d model ant for download as max on turbosquid: 3d models for games, architecture, videos. (1152518)
turbosquid
$99

Ant
...ant
turbosquid
royalty free 3d model ant for download as c4d on turbosquid: 3d models for games, architecture, videos. (1213598)
turbosquid
$40

Ant
...ant
turbosquid
royalty free 3d model ant for download as max on turbosquid: 3d models for games, architecture, videos. (1311970)
turbosquid
$29

ant
...ant
turbosquid
royalty free 3d model ant for download as c4d on turbosquid: 3d models for games, architecture, videos. (1662734)
turbosquid
$10

Ant
...ant
turbosquid
royalty free 3d model ant for download as c4d on turbosquid: 3d models for games, architecture, videos. (1621757)
turbosquid
$5

Ant
...t
turbosquid
royalty free 3d model ant for download as blend on turbosquid: 3d models for games, architecture, videos. (1375027)